
INS/GNSS组合导航(六)车载导航坐标系
0.摘要
INS作为一种完全自主的导航系统,其与GNSS组合导航时需要知道其与GNSS在同一坐标系下的位置信息,这就涉及到INS的几个导航系统之间的转换。
基于INS/GNSS的组合导航对车辆行驶过程进行位姿(PVA 位置、速度、姿态)解算时,常常涉及到以下4个坐标系,包括i-frame, e-frame, n-frame,v-frame,b-frame。本文对其分别阐述予以统一同时给出坐标系之间的转换关系。
1.坐标系定义
1.1 地心惯性坐标系(i-frame)
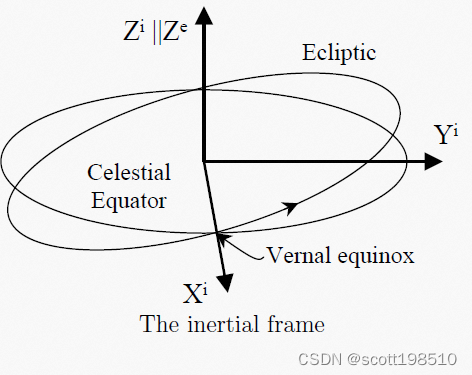
惯性坐标系i-frame(用 i 表示),主要是指在空间保持静止或者匀速直线运动(无加速度)的坐标下,它提供惯性传感器输出的参考基准。在GNSS中也需要用到惯性坐标系,这里我们常用的惯性系是以地心为参考原点,即地心惯性系ECI(Earth Center Inertial),其具体定义为:
- 地球质心为坐标系原点
- Z轴沿着地球自转轴指向协议地极;
- X轴位于赤道平面内,指向春分点;
- Y轴与X轴、Z轴构成右手笛卡尔坐标系。
1.2 地心地固系(e-frame)
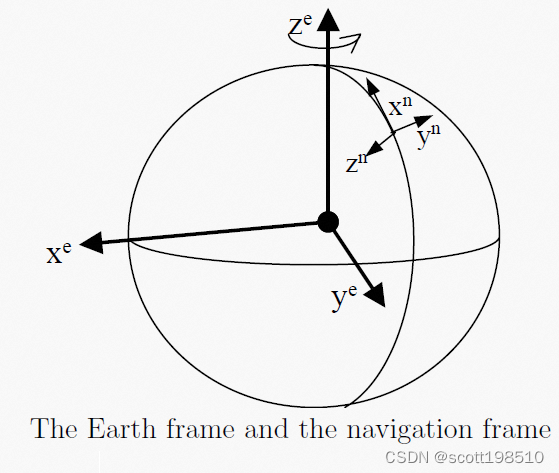
地固系(用 e表示),也称为地心地固系ECEF-frame,其参考原点、Z轴的定义与ECI坐标系一致,但坐标系随着地球旋转,旋转角速度为,其具体定义为:
- 坐标系原点与地球质心重合;
- Z轴指向协议地极;
- X轴指向赤道平面与本初子午线(格林尼治经线)的交点
- Y轴位于赤道平面内,与X轴、Z轴构成右手笛卡尔坐标系。
其与惯性系i-frame的转换简单,即:
从ECI坐标系转换到ECEF坐标系,需要将ECI坐标系绕Z轴旋转角度 ,其中
表示相对参考历元的时间。因为旋转矩阵的正交性,有如下关系:
1.3当地导航坐标系(n-frame)
导航坐标系(n-frame)是一种地理坐标系,也被称为当地水平坐标系LLF坐标系,即常说的NED、ENU坐标系。其常用的定义如下:
- 坐标原点是惯性器件坐标系的中心(惯性器件的三轴交点)
- X轴指向当地北方向(NED-N);若采用ENU,X轴指向当地水平正东方向
- Y轴指向当地东方向(NED-E);若采用ENU,Y轴指向当地水平正东方向
- Z轴指向地向(NED-D);若采用NEU,Z轴指向天,与X、Y构成右手笛卡尔坐标系
导航坐标系与载体坐标系的转换是惯性导航中的核心。因为惯性传感器测量输出的是载体坐标系的比力,需要将其转换到导航坐标系进行积分才能得出加速度信息。在已知欧拉角的情况下,两者的转换矩阵如下(按照n-frame → b-frame 的变换关系先绕z轴旋转,再绕y轴旋转,最后绕x轴旋转,对应的三个角度分别是,, (绕z轴偏航角yaw),
(绕y轴俯仰角pitch),
(绕x轴翻滚角roll)):
相应得到:
1.4 车体坐标系(v-frame)
通常,IMU坐标系称为b系。假设b系与v系对齐,如图A所示。然而,实际情况可能并非如此,如图B所示,v系和b系之间可能存在一些角度偏差,比如IMU传感器倾斜安装。当用户负责安装惯性系统时,这可能适用于PNS。 如图B 所示。假设两个坐标系具有滚转角 、俯仰角
和方位角
,则这些角度的 DCM 可以写为:
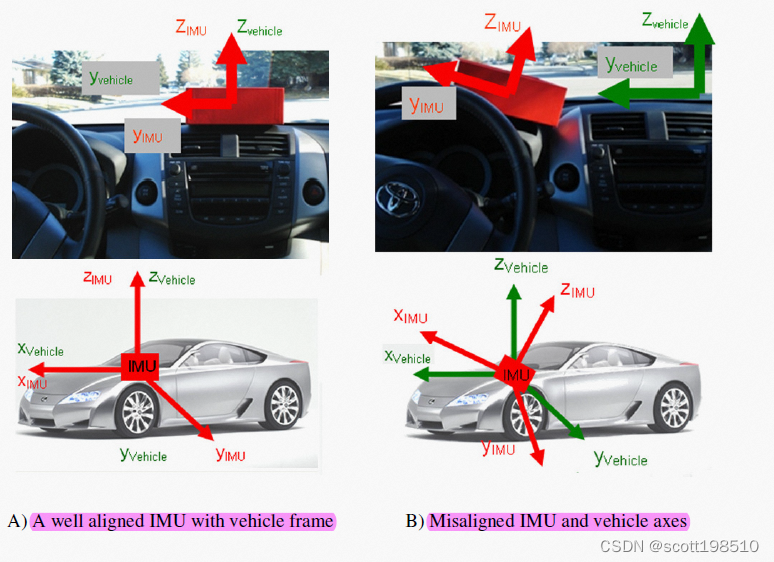
1.5 载体坐标系(b-frame)
如上图所示IMU传感器对应的坐标系就是载体坐标系 b-系。
IMU正常情况下的水平安装时,不考虑安装误差,可视为b-系与v-系重合,但倾斜安装IMU时,二者之间存在角度偏差,此时,b-系与v-系要分开对待。
2.DCM微分方程
对于已知参考坐标系R-frame,载体坐标系b-frame,得到 的推导如下:
1)由定义:
2) DCM
3)带入得:
相关文章
- 【BZOJ1485】[HNOI2009]有趣的数列(组合数学)
- 【UOJ#275】组合数问题(卢卡斯定理,动态规划)
- 2020年全国大学生智能车竞赛华南赛区线上比赛高校组合
- 组合投资的风险与收益概述
- UVa 12034 Race (递推+组合数学)
- 算法入门到进阶(三)——搜索技术(子集生成和组合问题)
- 转 精选37条强大的常用linux shell命令组合
- INS/GNSS组合导航(二)GNSS卫星定位原理及误差源
- INS/GNSS组合导航(九)标定/对准、零速修正与运动约束
- js产生一个随机的字符串数字组合
- 详解组合数相关性质
- INS/GPS组合导航类型简介
- 组合导航中的实用技巧-ZUPT+CUPT
- 优化后的组合算法
- 新秀翻译(一个)——Java在继承和组合
- 设计模式(九):Composite组合模式 -- 结构型模式
- C/C++ 组合的输出
- test和je指令的组合用法
- 【bzoj4710】[Jsoi2011]分特产 容斥原理+组合数学