
《制造业中的机器人、自动化和系统集成》—— 2.2 机器人的性能
本节书摘来自华章出版社《制造业中的机器人、自动化和系统集成》一书中的第2章,第2.2节,作者[英] 麦克·威尔逊(Mike Wilson),更多章节内容可以访问云栖社区“华章计算机”公众号查看。 2.2 机器人的性能
构型和轴数对机器人性能有明显的影响,正如上面讨论的那样,某种机器人构型更加适用于某些特定的应用场合。例如,SCARA构型机器人特别适用于高速和高重复性的装配任务。基于特定机器人构型所针对的应用场合,每个制造商生产的机器人有不同的特点和性能。28主要机器人制造商能够生产覆盖一系列应用场合所需性能的系列化机器人。起初,他们专门研究一种特定的机器人构型——关节臂型、SCARA型或直角坐标型,如今他们仍然更倾向于研究那些主要的构型,尽管大多数制造商还生产适用于特定应用场合的、不同结构的机器人。针对某一应用场合,我们可以从不同的机器人制造商那里获得多种机器人选择。
除了机器人的轴数和构型外,机器人的主要性能特征由下面4个参数确定:
●负载能力
●重复性
●可达空间和工作空间
●速度
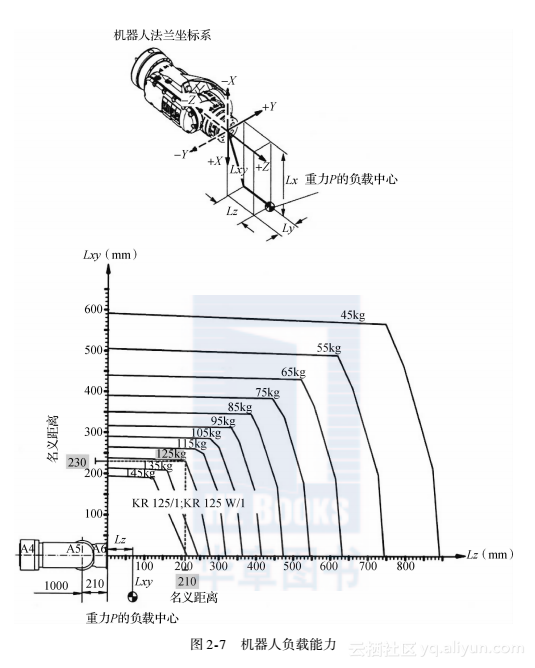
负载能力通常是指机器人手腕的工具安装法兰能承受的最大载荷。在该载荷的作用下,机器人能达到其他的指标,包括重复性、速度以及长期可靠运行。需要注意的是,详细的规格参数(通常由机器人手册提供)说明负载重心位置在工具安装法兰的两个方向上的偏距(如图2-7所示)。当与工具安装法兰的距离增加时,有效负载量会减少,因此,如果工具相当大,机器人搬运工具或者工件的能力可能低于给定的负载能力。
机器人的重复性通常是指点的重复性,但在某些情况下也需说明轨迹的重复性。值得注意的是,尽管机器人具有重复精度,但不是绝对精度。大多数机器人由于自身的结构并不能精确运动到指定的位置,例如到达空间中的XYZ坐标,但是会在其重复精度确定的公差带内不断重复到达示教的位置。点重复性对于点焊、操作、装配以及相似的应用场合很有用,但是对于焊接和涂胶等应用场合,轨迹重复性更有用。
可达空间和工作空间通常定义在机器人手腕的中心。对于一个6轴机器人来说,就是指第5轴的中心,它意味着即使在可达的极限或工作空间的边界上,机器人也以最大范围调整手腕姿态。工作空间通常用侧视图和俯视图来展示(如图2-1所示)。机器人应该能够到达工作空间内的任何点。值得注意的是,不同构型的机器人的工作空间的形状是不同的。
速度通常指每个轴可以达到的最高速度。这个值是有限的,因为每根轴并不是独立运行的,并且在许多应用中要完成的移动距离很短,不需要机器人加速到最大速度。然而,机器人的实际速度会影响许多应用的工作循环时间。
人们开发了门型测试(见2.1节),它特别适用于装配场合,为不同的机器人提供可靠的速度比较。
与速度和轨迹重复性相关的另一点是,机器人在高速移动时通过圆角的能力。如果设定机器人在低速下通过一个直角的拐角,那么这个动作容易实现。如果速度升高,机器人就会绕着拐角做圆滑运动,使得轨迹出现误差。这种误差会随着速度的升高而增加。人们已经提出了处理这种问题的解决办法,例如ABB公司研发的“TrueMove”控制技术,它能够保证机器人不受速度的影响而按照设定的路径运动。
《制造业中的机器人、自动化和系统集成》—— 导读 [第1章简介](https://yq.aliyun.com/articles/89305) [1.1本书范围](https://yq.aliyun.com/articles/89305) [1.2自动化引论](https://yq.
《制造业中的机器人、自动化和系统集成》—— 3.9 小结 本章讲述了典型自动化系统的关键要素,详细介绍了其中最重要的要素。显然,针对不同的应用环境,可以使用很多不同的设备。对于每一种应用,也有很多种选择,每种选择都会对项目的成本和最终成功有很大影响。每个人不可能对于每一类设备和应用都有详细的认识。
《制造业中的机器人、自动化和系统集成》—— 3.8 安全与防护 安全系统的基本任务是保证操作人员不会在操作、使用或维护自动化系统时伤害自己。有许多提供安全操作环境的标准可以遵循。国家标准与用户提供的标准可能同样适用。这些标准经常是指导方针而不是确切的陈述,还需要自动化系统供应商做风险评估,包括与操作人员、编程人员、维护人员和第三方的可能存在的接口。
《制造业中的机器人、自动化和系统集成》—— 3.7 系统控制 为了提供这种类型的控制,20世纪60年代末发明了第一个可编程逻辑控制器(PLC)。在发明PLC之前,这种功能由大量的继电器来实现,往往很复杂,而且难以维修,难以适应系统升级。PLC使用软件提供了同样的功能,而没有使用大量的继电器构成的硬逻辑。
《制造业中的机器人、自动化和系统集成》—— 3.6 装配自动化组件 典型的装配系统是围绕一个将工件在不同的工位之间移动的机构而建立的,在每个工位完成装配操作。这些操作可能包括给装配体增加工件、机械连接(比如铆接或螺钉连接)或者其他连接技术(如焊接或者粘接),以及密封、检测和包装。检测可能包括电子检测、泄露检测或者视觉检查,用视觉来保证总装配满足要求的标准和性能。
《制造业中的机器人、自动化和系统集成》—— 3.5 工装与夹具 机器人是具有重复性的,但是为了能够得到所需的结果,被加工的工件也需要放置在可重复的位置上。工装或夹具用来固定工件,确保它们被正确地放置在可重复的位置,从而允许机器人完成所需的操作,并达到预期结果。 弧焊对夹具的要求特别严格。
《制造业中的机器人、自动化和系统集成》—— 3.4 抓手和工具转换器 对于像装配、机床上下料和常见的材料搬运等应用,还包括包装、码垛、压机上下料和很多其他的应用,抓手是系统中最重要的要素之一。虽然类似于人手的抓手正在开发中,但依然很复杂且价格昂贵。大多数工业自动化应用都不需要具备这些高级功能的抓手。
《制造业中的机器人、自动化和系统集成》—— 3.3 工艺设备 自动化系统可以分为两类:用来装配、机床上下料或常见的材料搬运操作的自动化系统;实现某种加工工艺的自动化系统。前一类往往使用安装于机器人上的抓手,而后一类需要一些工艺设备来控制和实施该项工艺。
相关文章
- java实现第三届蓝桥杯机器人行走
- 【t062】最厉害的机器人
- 【华为机试真题 Python实现】机器人走迷宫
- 【ChatGLM vs ChatGPT】怎样实现机器人自动写代码?不少于3000字。
- python 调用图灵机器人api实现简单的人机交互
- Android 智能问答机器人的实现
- qq机器人智能聊天插件源码
- 【qq机器人】定时发送消息大全
- 【qq机器人】抖音视频分享
- 【qq机器人】欢迎加群通报
- 使用ChatGPT有风险吗?国内镜像和GPT微信机器人使用
- 机器人控制算法九之 位姿描述与空间变换
- 机器人控制算法二之matlab工具箱机械臂运动学正逆矩阵解具体分析
- 【IEEE2017】RL:机器人库:一种面向对象的机器人应用程序的方法
- 案例 - 图书管理+聊天机器人