
对滤波反投影重建算法的研究以phantom图进行matlab仿真,构建滤波器,重建图像
2023-09-14 09:06:08 时间
目录
1.算法描述
CT重建算法大致分为解析重建算法和迭代重建算法,随着CT技术的发展,重建算法也变得多种多样,各有各的有特点。本文使用目前应用最广泛的重建算法——滤波反投影算法(FBP)作为模型的基础算法。FBP算法是在傅立叶变换理论基础之上的一种空域处理技术。它的特点是在反投影前将每一个采集投影角度下的投影进行卷积处理,从而改善点扩散函数引起的形状伪影,重建的图像质量较好。

上图应可以清晰的描述傅立叶中心切片定理的过程:对投影的一维傅立叶变换等效于对原图像进行二维的傅立叶变换。傅立叶切片定理的意义在于,通过投影上执行傅立叶变换,可以从每个投影中得到二维傅立叶变换。从而投影图像重建的问题,可以按以下方法进行求解:采集不同时间下足够多的投影(一般为180次采集),求解各个投影的一维傅立叶变换,将上述切片汇集成图像的二维傅立叶变换,再利用傅立叶反变换求得重建图像。
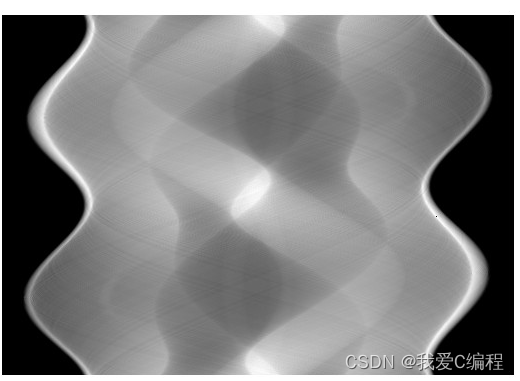
投影重建的过程是,先把投影由线阵探测器上获得的投影数据进行一次一维傅立叶变换,再与滤波器函数进行卷积运算,得到各个方向卷积滤波后的投影数据;然后把它们沿各个方向进行反投影,即按其原路径平均分配到每一矩阵单元上,进行重叠后得到每一矩阵单元的CT值;再经过适当处理后得到被扫描物体的断层图像
算法步骤如下:
1. 将原始投影进行一次一维傅立叶变换
2. 设计合适的滤波器,在φ_i的角度下将得到原始投影p(x_r,φ_i)进行卷积滤波,得到滤波后的投影。
3. 将滤波后的投影进行反投影,得到满足x_r=r cos((θ - φ_i))方向上的原图像的密度。
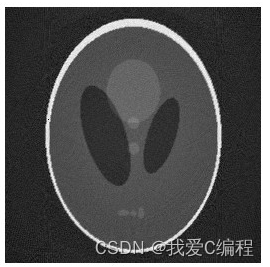
4. 将所有反投影进行叠加,得到重建后的投影。
2.仿真效果预览
matlab2013B仿真结果如下:



3.MATLAB部分代码预览
coordinateSource=[];
projMatrix=[];
detector=[];
proj=load(char('projection.mat'));
phyRatoDig=proj.phyRatoDig;
projMatrix=proj.projection;
yDetector=proj.yDetector;
nDetectors=proj.nDetectors;
figure(2)
showimge(projMatrix,360,512,0,max(max(projMatrix)));
D_dig=proj.focalDistance_dig;
sourceToDetector_dig=proj.focalDistance_dig+proj.detecDistance_dig;
s=[];
s=D_dig/sourceToDetector_dig*yDetector(1,:)*phyRatoDig;
Detector=yDetector(1,:)*phyRatoDig;
%
pe=[];
M=D_dig./sqrt(D_dig.^2+s.^2);
nViews=proj.nViews;
%
for i=1:nViews
pe(i,:)=projMatrix(i,:).*M;
end
figure(3);
showimge(pe,360,512,0,max(max(pe)));
disp('Filtering')
filternum=128;
filter_ramp=zeros(filternum,1);
for j=1:filternum % 16 point ramp filter
i=j-1-filternum/2;
if(i==0)
filter_ramp(j,1)=1/(8.0);
elseif (mod(i,2)==0)
filter_ramp(j,1)=0;
elseif (mod(i,2)==1)
filter_ramp(j,1)=-0.5/(i*i*pi*pi);
end
end
m=1;
figure(4);
plot(filter_ramp);
pfilter=[];
length_conv=filternum+nDetectors-1;
pPro=zeros(length_conv,1);
temp_pro=zeros(nDetectors,1);
h_filter=filternum/2;
ii=length_conv-h_filter-nDetectors;
for s=1:nViews % sample-loop
% for pp=1:h_filter
pro_left =(pe(s,1)+pe(s,2))/2.0;
pro_right=(pe(s,nDetectors)+pe(s,nDetectors-1))/2.0;
for pp=1:h_filter; %left part
pPro(pp,1)=pro_left;
end
%
for pp=1:nDetectors %middle part
pPro(h_filter+pp,1)=pe(s,pp);
end
%
for pp=h_filter+nDetectors+1:length_conv
pPro(pp)=pro_right;
end
% result_conv
for n=1:nDetectors
result_conv=0;
for jj=1:filternum
pPmove=pPro(n+jj-1,1);
result_conv=result_conv+pPmove*filter_ramp(jj,1);
end
pfilter(s,n)=result_conv;
end
end
figure(5);
showimge(pfilter,360,512,min(min(pfilter)),max(max(pfilter)));
% %%%%%%%%%%%%%%%%%%%%%%reArrange%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% %%%%%%%%%%%%%%%%%%%%%%Back projection%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
disp('BackProjection')
detecLength=proj.detecLength;
unitDis=detecLength/(nDetectors-1);
unitDis_dig=unitDis*phyRatoDig;
deltaBeta=2*pi/nViews;
M=proj.M;
N=proj.N;
fReconstruct=[];
for i=1:M
x=i-(M+1)/2;
for j=1:N
y=(N+1)/2-j;
r=sqrt(x^2+y^2);
theta=atan2(y,x);
%
result=0;
for s=1:nViews
beta= (s-1)*deltaBeta;
s1=D_dig*r*cos(beta-theta)/(D_dig+r*sin(beta-theta));
U=(D_dig+r*sin(beta-theta))/D_dig;
p1=sourceToDetector_dig/D_dig*s1;
if(p1>Detector(1,1)&&p1<Detector(1,512))
num=(p1-Detector(1,1)+unitDis_dig)/unitDis_dig;
numlow=floor(num);
result=result+((num-numlow)*pfilter(s,numlow)+(1-num+numlow)*pfilter(s,numlow+1))/U/U*deltaBeta;
end
end
fReconstruct(i,j)=result;
if( fReconstruct(i,j)<0)
fReconstruct(i,j)=0;
end
end
end
%
figure(6)
%
final=zeros(M,N);
for i=1:M
final(i,:)=fReconstruct(:,257-i);
end
A_0224.完整MATLAB程序
V
相关文章
- matlab 深度图像转三维点云
- 【故障定位】基于粒子群优化算法的故障定位及故障区段研究【IEEE33节点】(Matlab代码实现)
- 【微电网】基于改进粒子群算法的微电网优化调度(Matlab代码实现)
- 大规模非线性动力系统的高效可识别性、可控性和可观测性检测研究(Matlab代码实现)
- 基于LMS算法的Mackey Glass时间序列预测(Matlab代码实现)
- 基于蜜蜂优化算法的投资组合优化问题(Matlab代码实现)
- 【车间调度】基于模拟退火优化算法的的并行车间机器优化调度(Matlab代码实现)
- 【不确定性研究】基于信息间隙决策理论的综合能源系统优化调度研究【改进粒子群优化算法求解】(Matlab代码实现)
- 【负荷预测】基于改进灰狼算法(IGWO)优化的LSSVM进行负荷预测(Matlab代码实现)
- 电动汽车对电网的影响(数据+Matlab代码)
- 猿创征文|基于鲁棒控制理论的微电网优化调度(Matlab代码实现)
- 基于MATLAB的车牌识别系统研究(Matlab代码实现)
- 【脑电图和心电图分类】基于改进灰狼优化算法的BW(2D)2PCA和KELM对脑电图和心电图进行分类(Matlab代码实现)
- 差分进化算法在图像处理中的应用研究(Matlab代码实现)
- 基于原子势函数及人工蜂群算法进行形状匹配优化(Matlab代码实现)
- 【智能算法】蚁群算法及Matlab实现 —— TSP问题
- 【MATLAB】MATLAB 仿真 — 窄带高斯白噪声
- 基于注水算法的MIMO信道容量matlab仿真
- m分别使用能量检测法和循环谱实现ofdm信号检测matlab仿真
- m低信噪比下GPS信号的捕获算法研究,使用matlab算法进行仿真
- m低信噪比下GPS信号的捕获算法研究,分别使用matlab和FPGA对算法进行仿真和硬件实现
- m基于PCA-SA低纬紧致姿态空间学习算法的单目视频人体姿态提取matlab仿真
- m分别使用meanshift和camshift两种算法实现人员跟踪并输出人员移动曲线matlab仿真
- 基于matlab的有参考图像质量评价,使用多种算法进行图像质量评价仿真
- m基于多核学习支持向量机MKLSVM的数据预测分类算法matlab仿真
- 【车间调度】基于模拟退火优化算法的的并行车间机器优化调度(Matlab代码实现)