
基于智能优化算法的机器人路径优化(Matlab代码实现)
1 概述
最短路径问题是人工智能的一个活跃研究方向,在理论和应用上有着广泛而深入的研究。国内外大量专家学者对此问题进行了深入研究。经典的图论与不断发展完善的计算机数据结构计算法的有效结合使得新的最短路径算法不断涌现。它们在空间复杂度、易实现性及应用范围等方面各具特色。
在实际设计中,搬运机器人﹑足球机器人常常要研究如何选择两地之间线路,使两地间距离最短或最优。经典的最短路径算法之一Dij kstr a算法是目前多数系统解决最短路径问题采用的理论基础,而遗传算法和蚂蚁算法最近几年兴起的可以求解最短路径问题的算法。
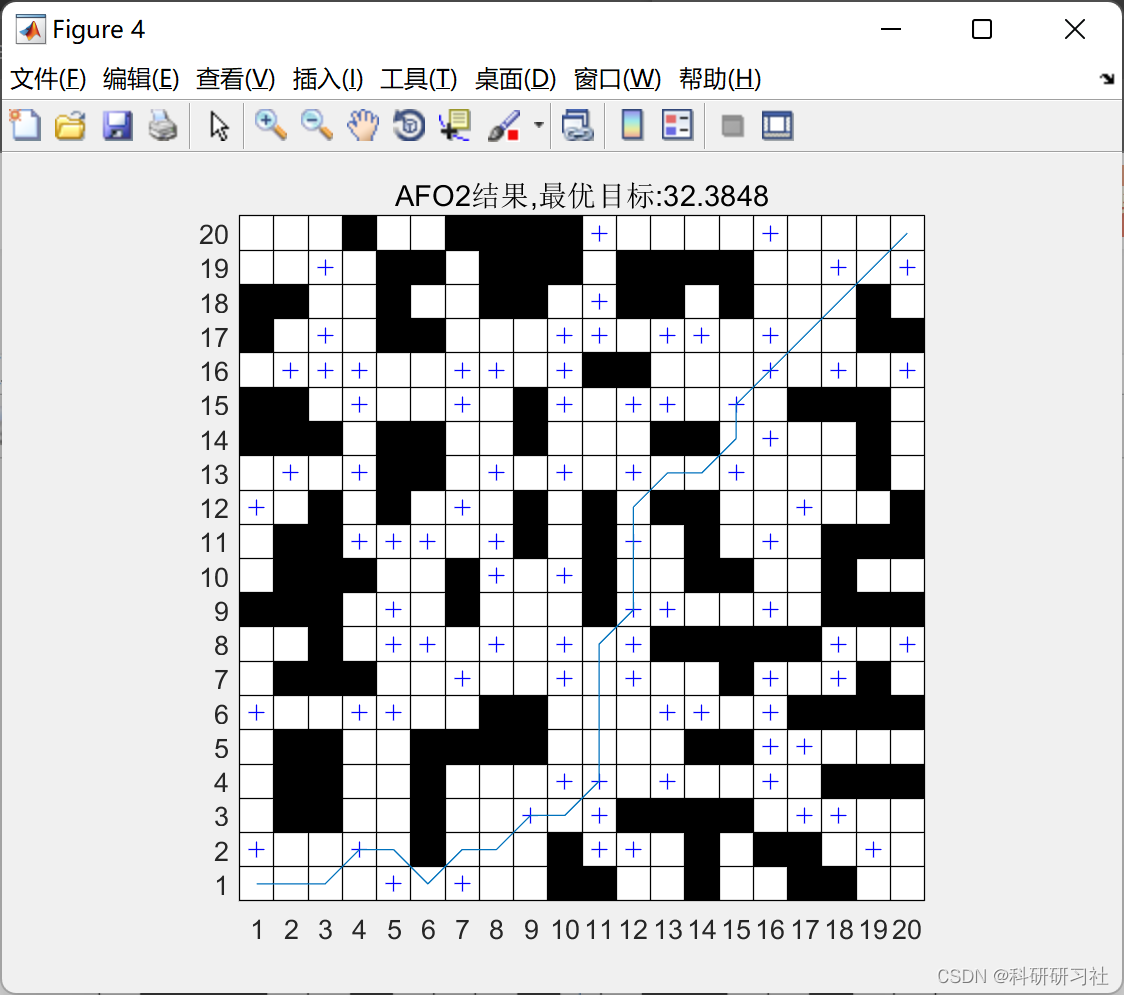
2 运行结果

最短路径问题是人工智能的一个活跃研究方向,在理论和应用上有着广泛而深入的研究。国内外大量专家学者对此问题进行了深入研究。经典的图论与不断发展完善的计算机数据结构计算法的有效结合使得新的最短路径算法不断涌现。它们在空间复杂度、易实现性及应用范围等方面各具特色。
在实际设计中,搬运机器人﹑足球机器人常常要研究如何选择两地之间线路,使两地间距离最短或最优。经典的最短路径算法之一Dij kstr a算法是目前多数系统解决最短路径问题采用的理论基础,而遗传算法和蚂蚁算法最近几年兴起的可以求解最短路径问题的算法。
3 参考文献
[1]杨忠,刘华春.基于BP神经网络的扫地机器人寻路算法[J].电脑知识与技术:学术版,2017,13(4):156-158
[2]宋遥,李国名,徐丽.采用蚁群算法模拟机器人寻路的仿真实验[J].河北工业科技,2010,27(5):340-343
[3]机器人寻路.少年电脑世界,2021(10):26-27
摘要:远程控制大多数在灾区和其他危险环境中工作的机器人,都是远程遥控的。操作员可以使用操纵杆、触摸板或其他计算机输入设备控制机器人以指导其移动。当机器人就在附近工作时,可以通过线缆发送指令。而大多数系统采用无线电信号传输指令,以便操作员可以远离危险区域。
4 Matlab代码实现
相关文章
- 血管里上班的「纳米机器人」有了原型
- matlab怎么对语音信号处理,语音信号处理MATLAB程序
- matlab interp1db,matlab – Matlab interp1图出现数据偏移 – 堆栈内存溢出
- DIY轮腿机器人-Hyun(部件)
- matlab将txt数据分类,MATLAB读取txt文件,txt里面有字符串和数值两种类型
- UDroid-C4控制器是自组机器人或课题毕业设计平台,国人原创项目符合大众开发习惯!
- MATLAB的循环_matlab循环输出
- matlab循环语句for_MATLAB以下选择语句错误的是
- Matlab赋值_matlab二维数组赋值
- matlab画三维约束图命令,Matlab画三维图的方法[通俗易懂]
- Matlab函数定义_matlab子函数
- ROS2机器人编程简述humble-第二章-Publishing and Subscribing .3.2
- 像微生物一样移动的微型机器人
- OpenAI解散机器人团队,曾试图造AGI机器人,创始人:最好的决定
- 机器人操作系统,除了 Android 还有一个 ROS
- 深度:解密巨头们所关注的聊天机器人
- 快速安装Linux上的MATLAB(linux安装matlab)
- 2017年引入机器人判案?南京法院:机器人还不够智能
- CBInsights最新报告:过去五年里什么样的机器人初创企业最容易获得融资
- 看它72变,不仅能随时“变身”、还能游泳滑翔的“Prime”机器人
- 五篇ICRA最佳医疗机器人获奖论文大盘点 | ICRA 2017