
3DE学习笔记1机器人轨迹设置3
2023-09-27 14:25:51 时间
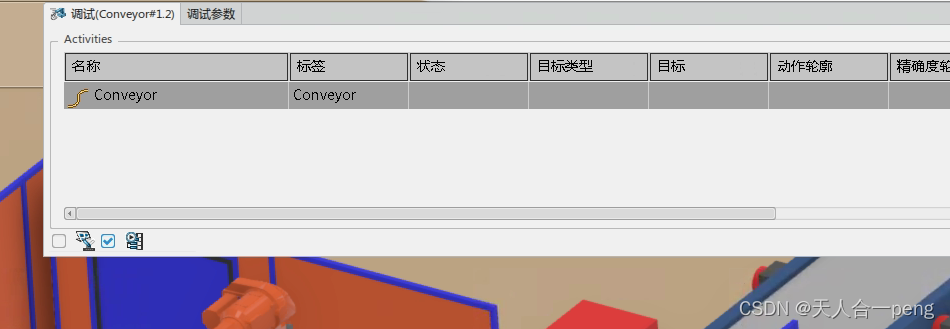
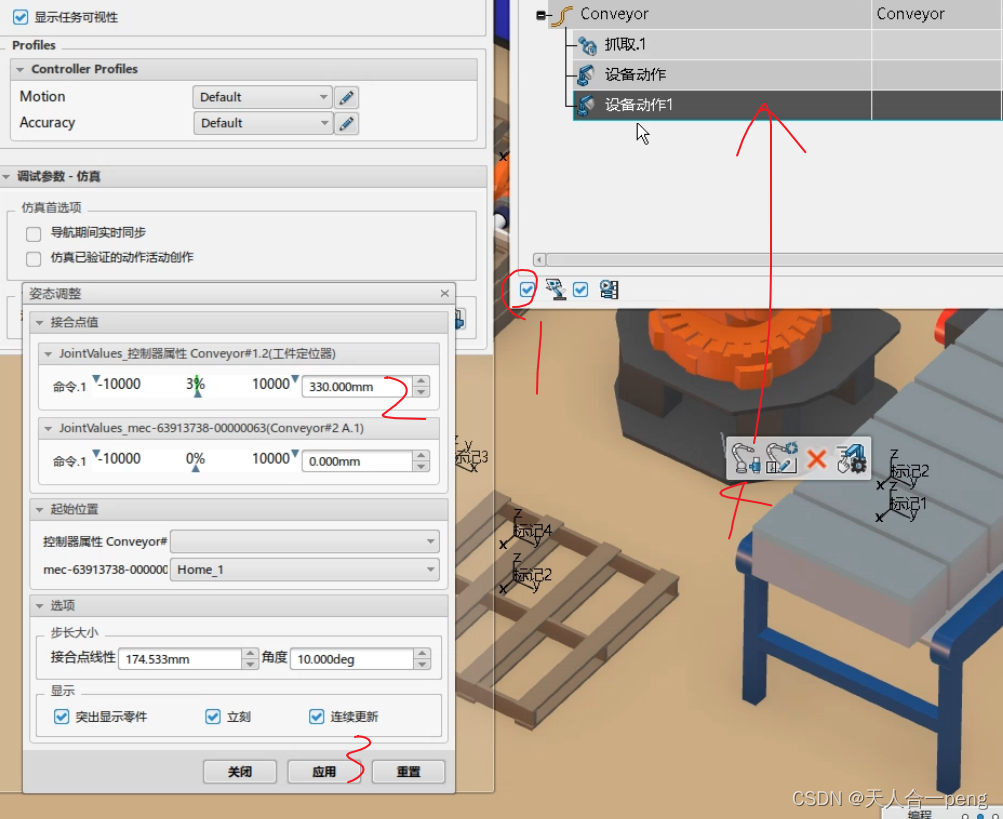
1 传送带设置

图中12顺序可以调换
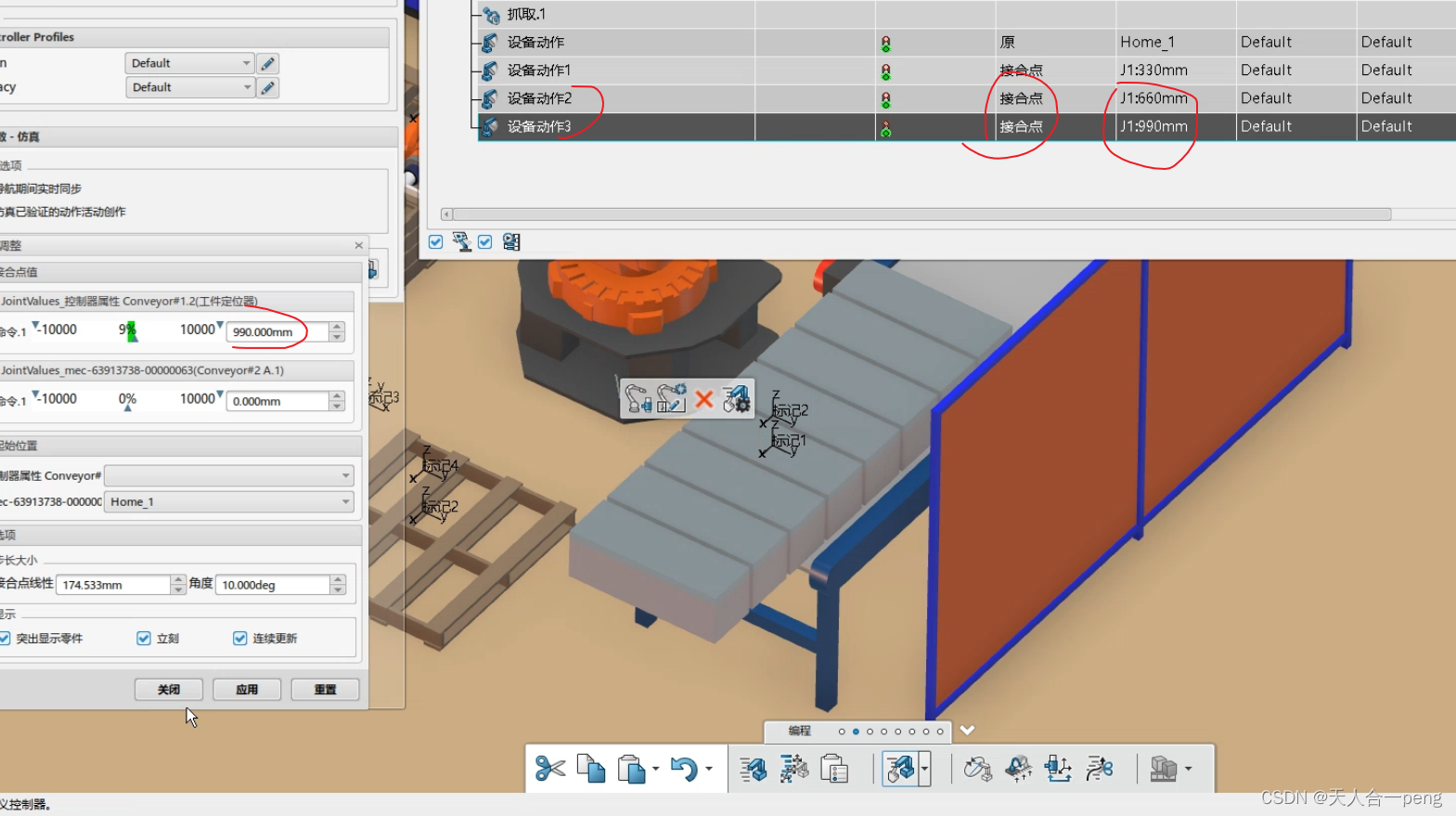
2 教导设置

3 创建抓取任务
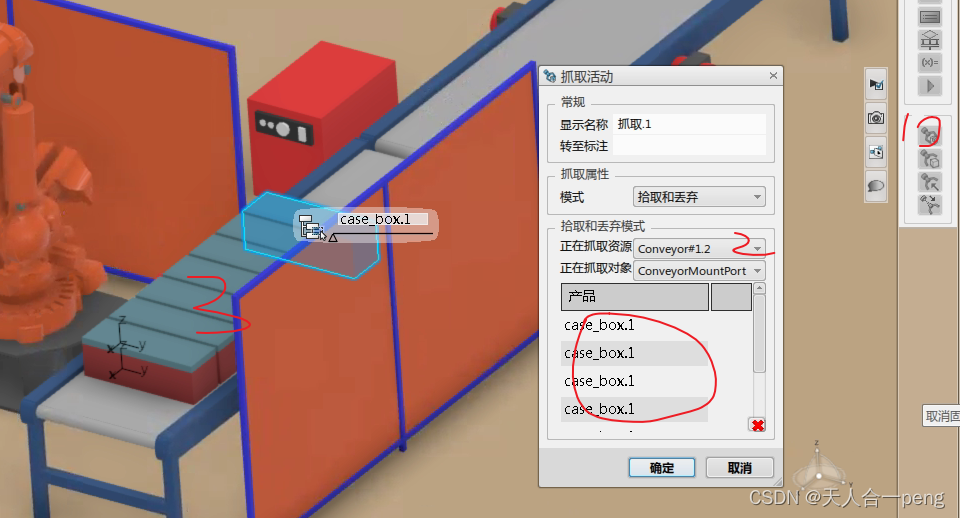
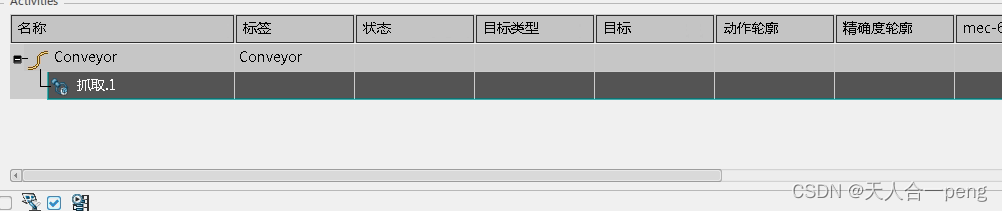
双击可以编辑
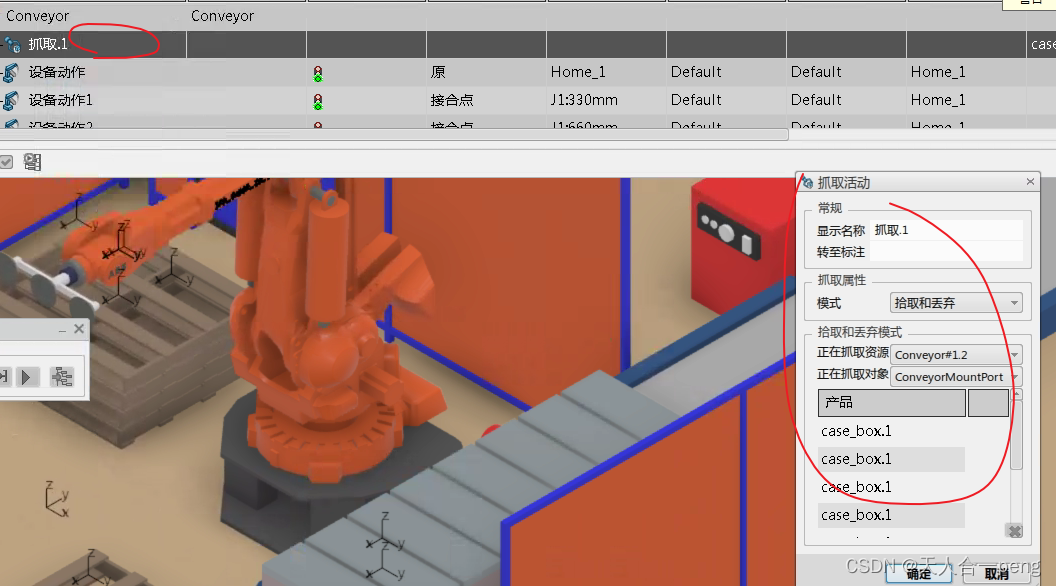
6删除第一个

右边选中看是不是三维模型中的第一个
5 释放活动设置
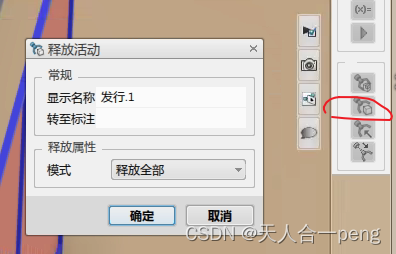


6 灰色选择不能用调整
上图中最右侧单击再打开就好了
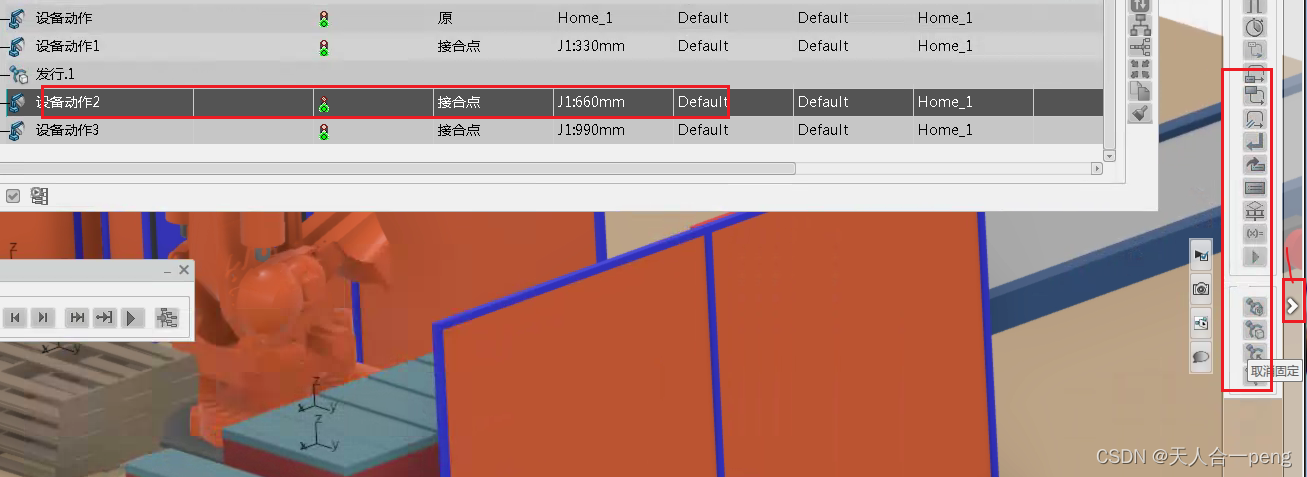
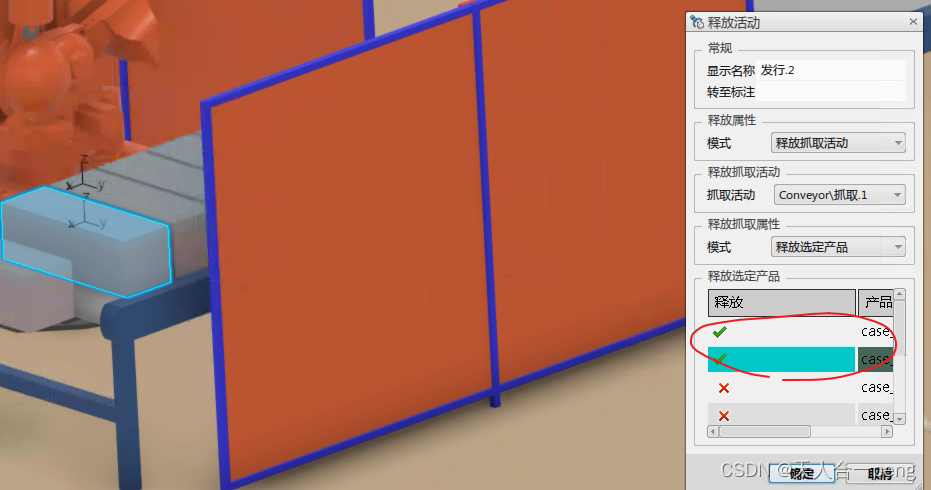
7 释放活动设置
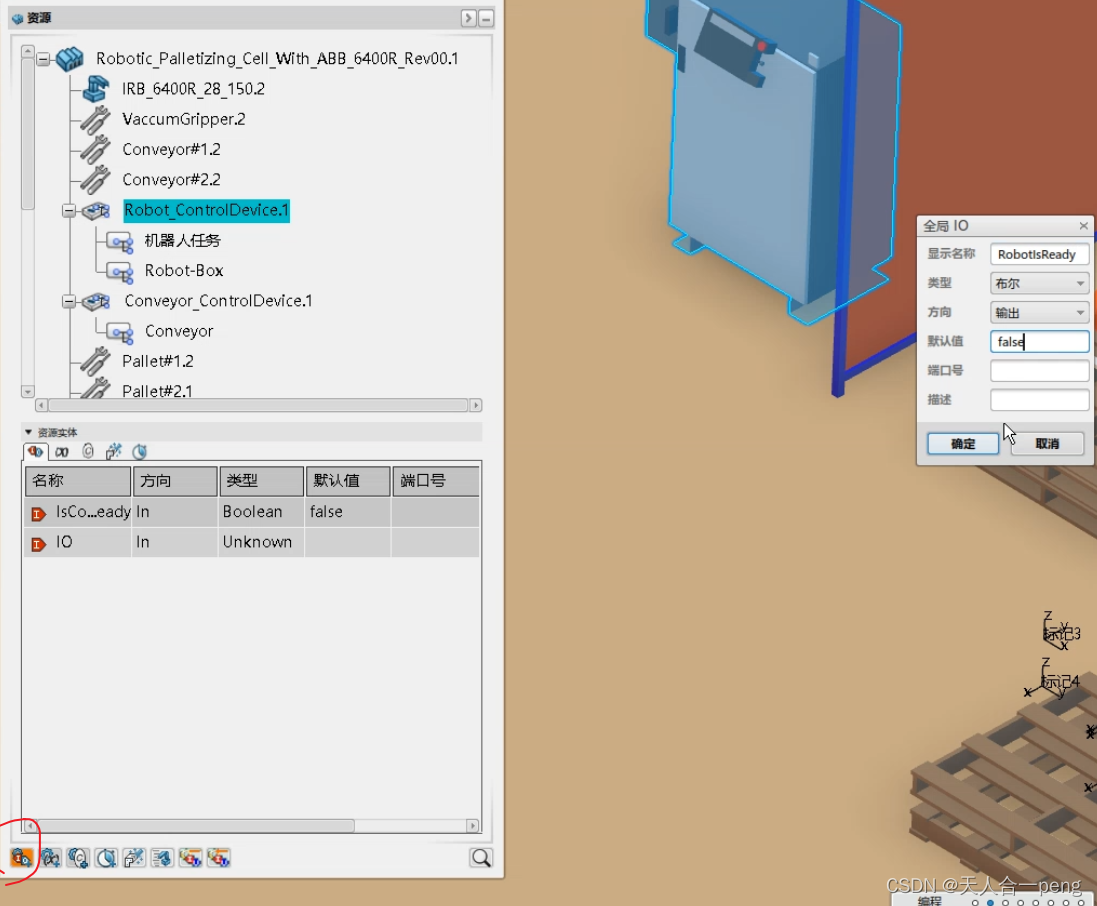
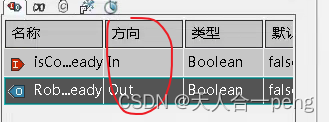
8创建机器人IO资源
创建前一定先选中对象,不然下面的图标不出来
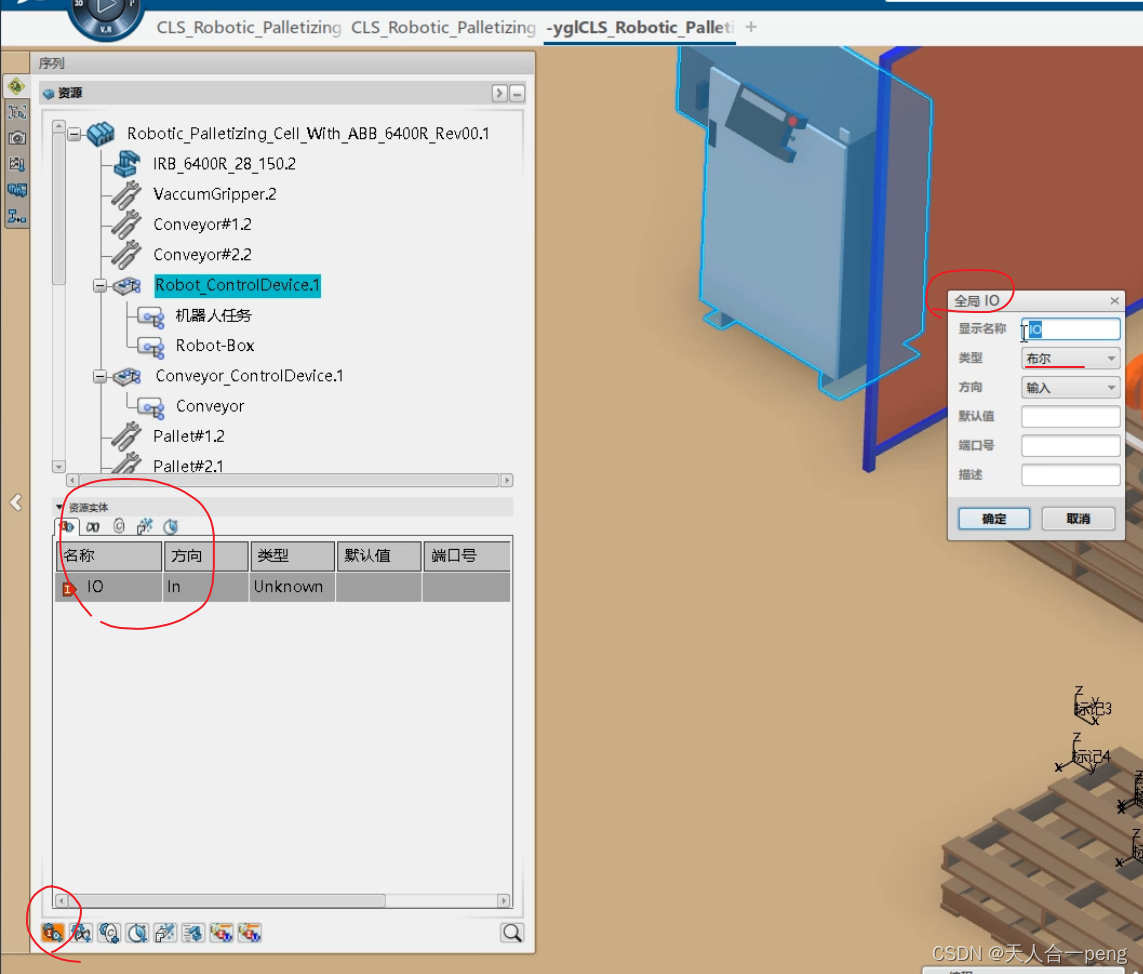

isConveyorReady
再建一个IP资源
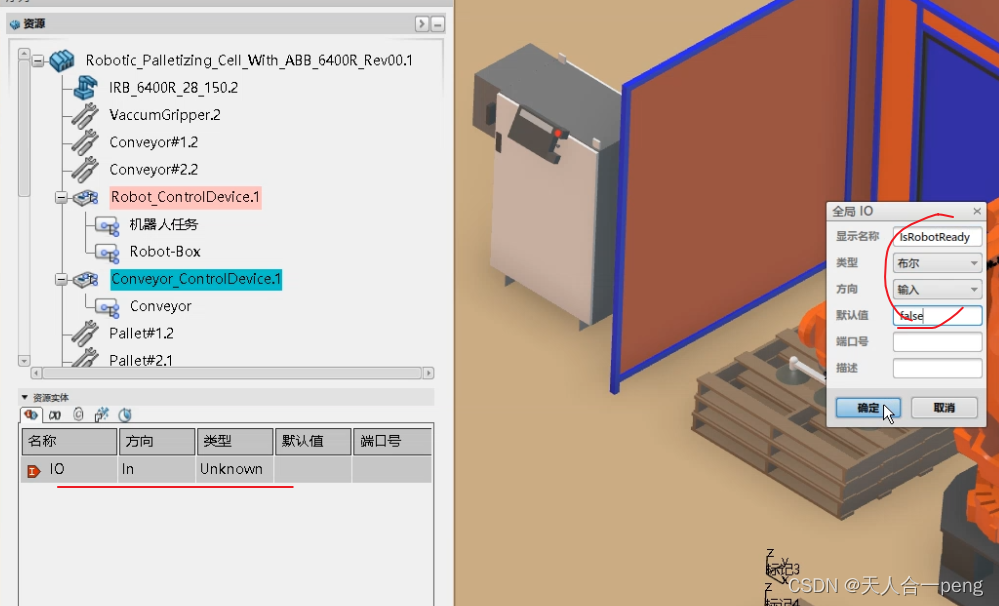
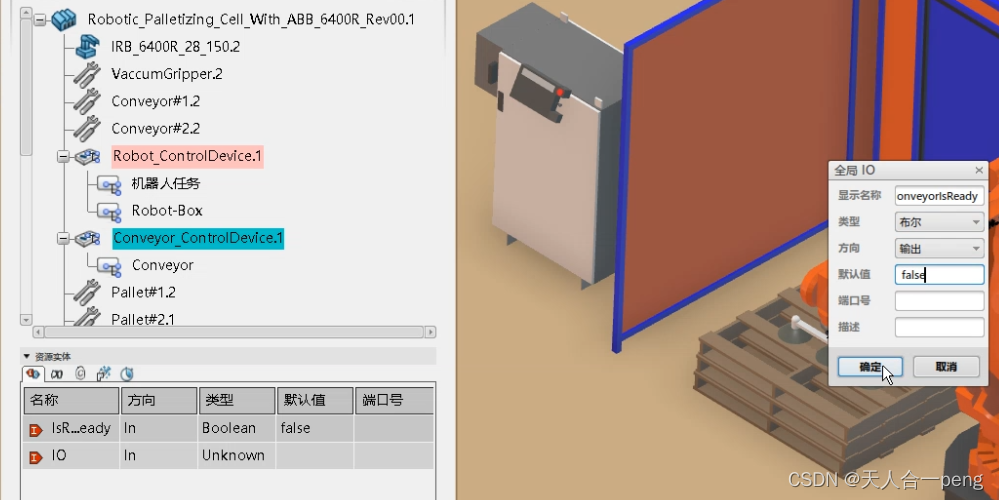
9 创建传送带IO资源
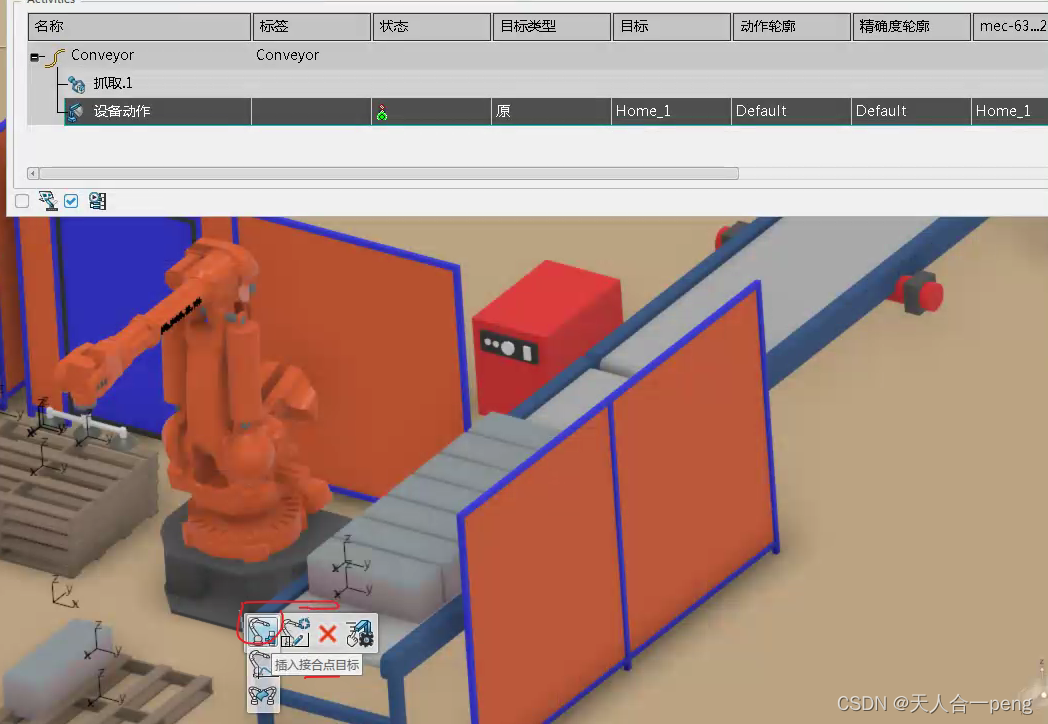
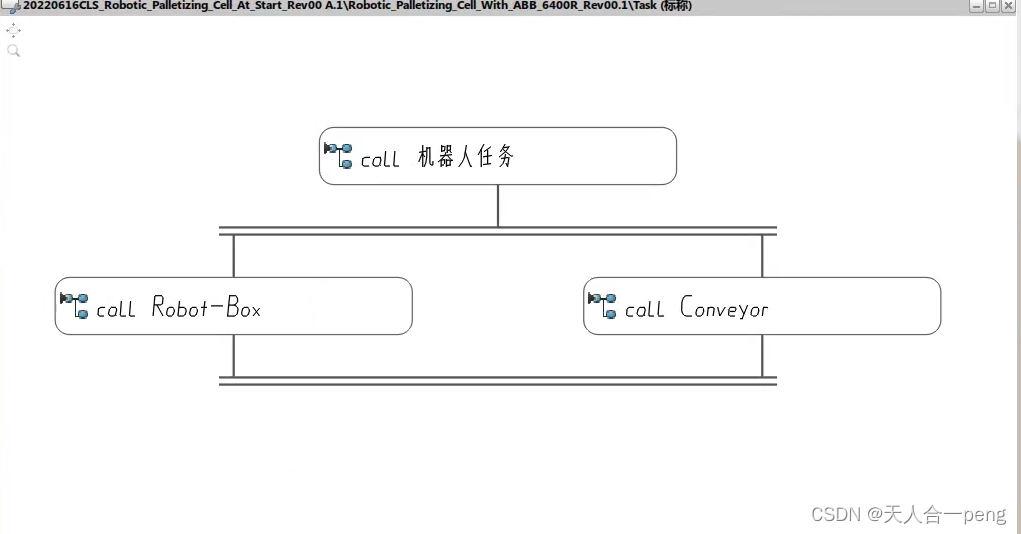
10 创建任务
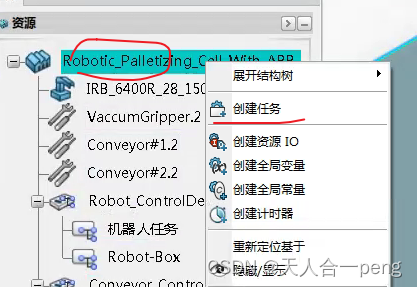
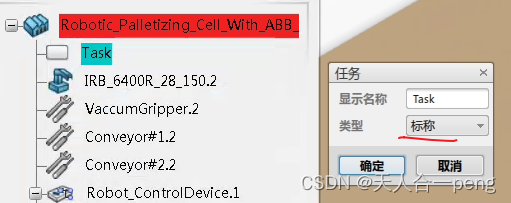
双击后修改
按顺序托动过来即可
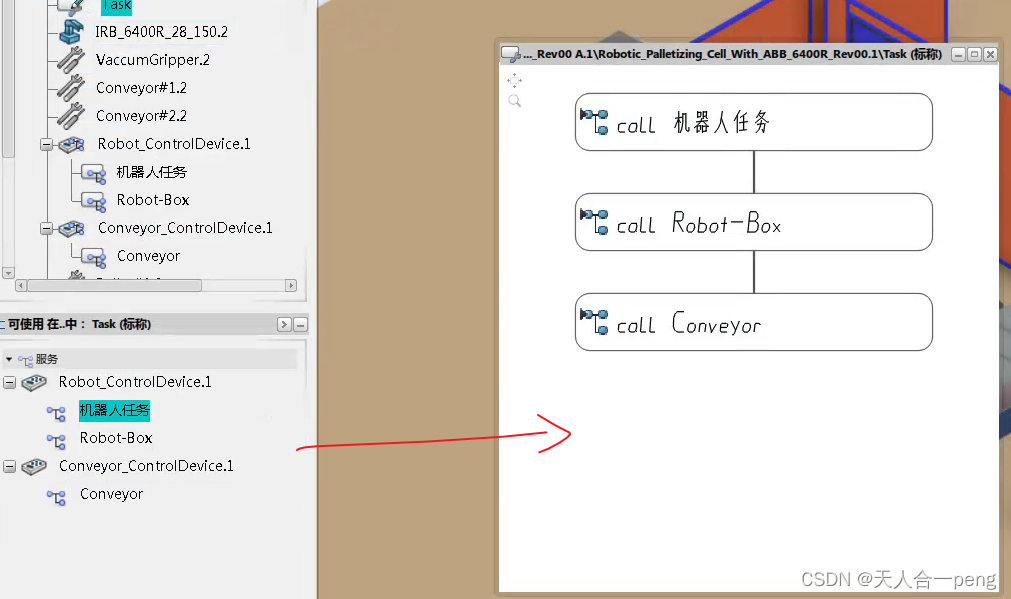
选中后可以通中键移动
托动过来
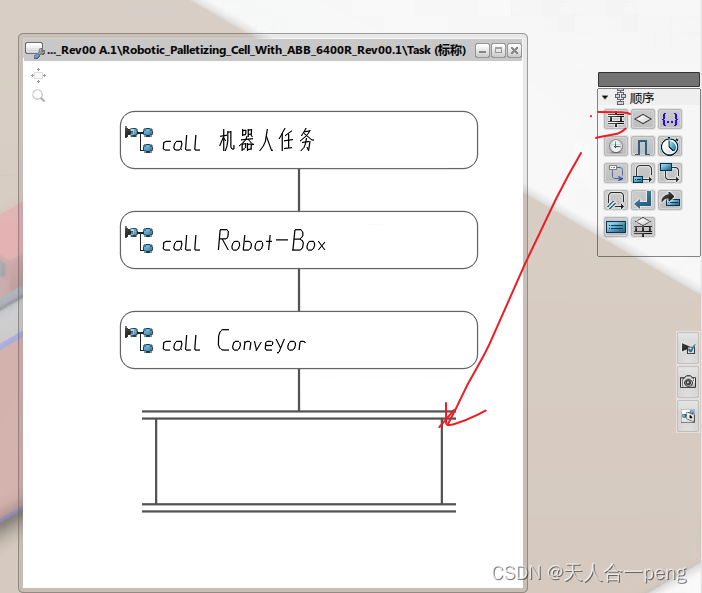
选中对象将其托动到指定的位置即可
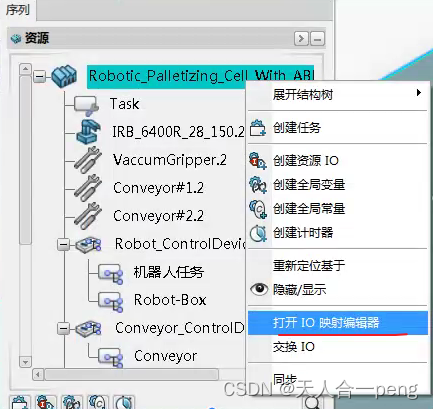
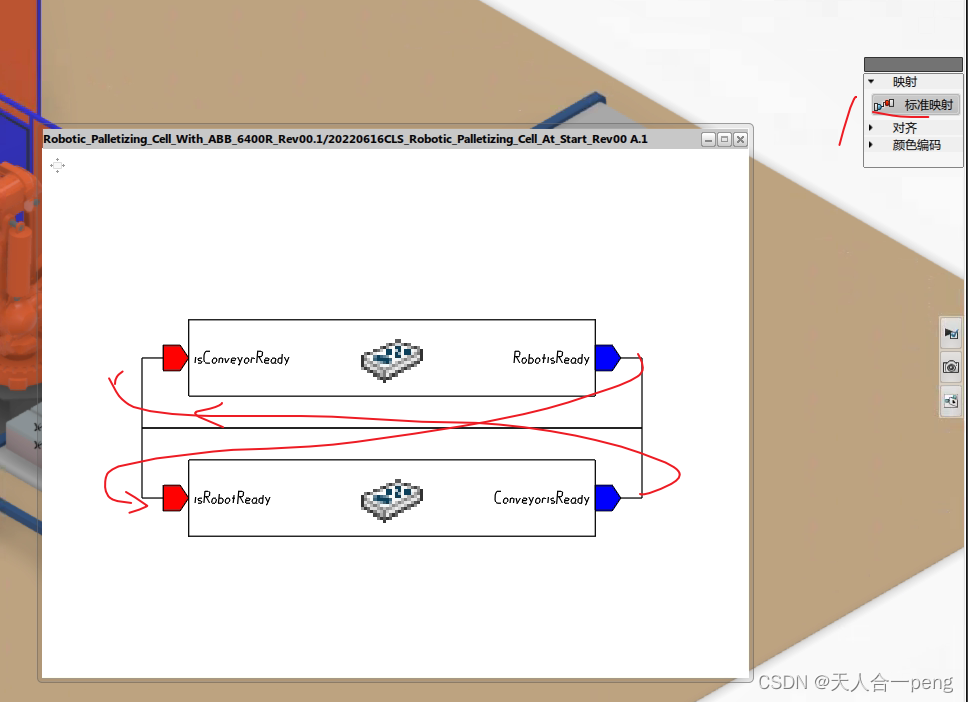
11 打开资源映射编辑器
相关文章
- python基于request库,调用聊天机器人接口,request的几种方式汇总
- 人类未来可能和机器人“结婚”
- 机器人系统设计与制作:Python语言实现1.2 机器人从哪儿来
- ROS机器人程序设计(原书第2版)3.1.1 使用gdb调试器调试ROS节点
- 《乐高EV3机器人搭建与编程》一1.6 小结
- 《JavaScript机器人编程指南》——1.3 Johnny-Five和NodeBot的革新
- 《JavaScript机器人编程指南》——1.5 搭建开发环境
- NVIDIA公司推出的GPU运行环境下的机器人仿真环境(NVIDIA Isaac Gym)在Ubuntu Server端headless运行
- OTTO机器人之胳膊测试
- ROS(4):机器人手臂&freeCAD