
3DE学习笔记1机器人轨迹设置2
2023-09-27 14:25:51 时间
1 新建第二个标记组

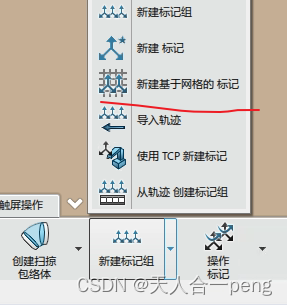
2 建立网格坐标
先选中MyGroup2才会出现图中在2
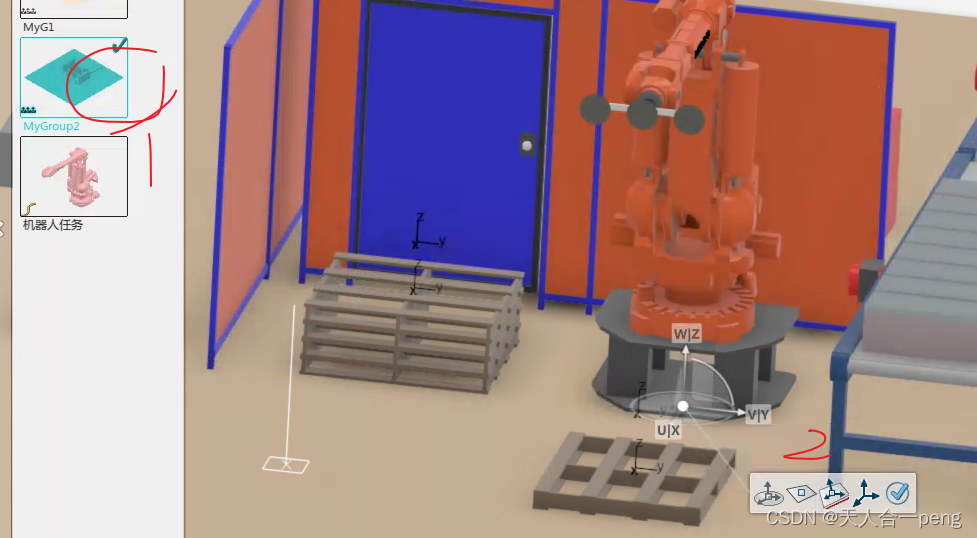
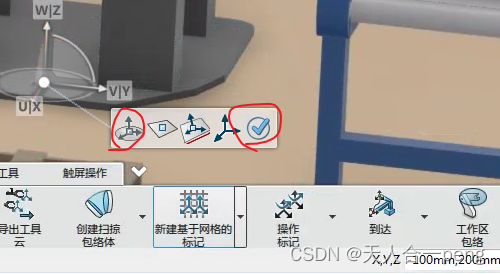
选第一个的第这个,然后打勾
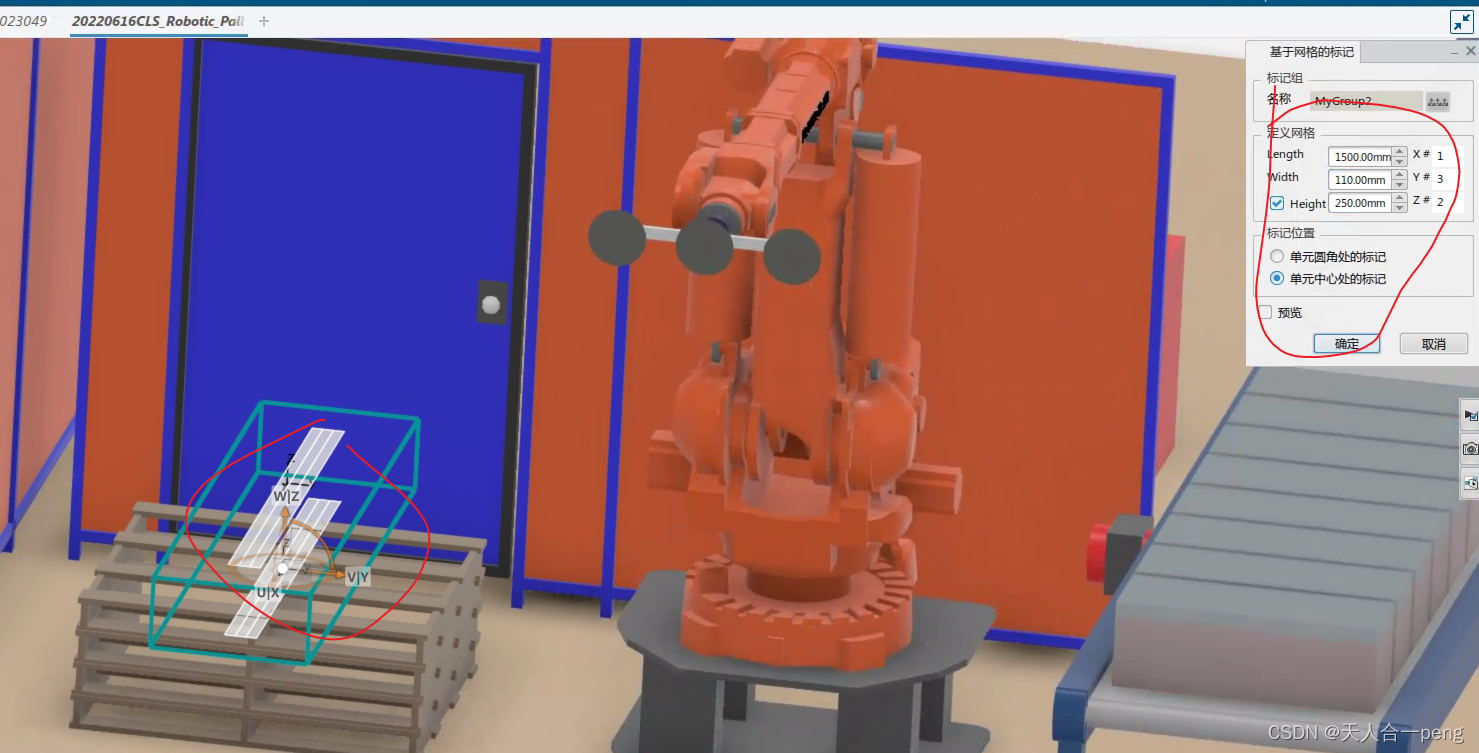
并选预览
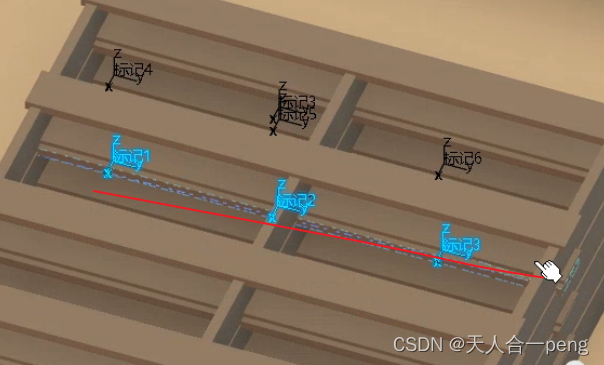
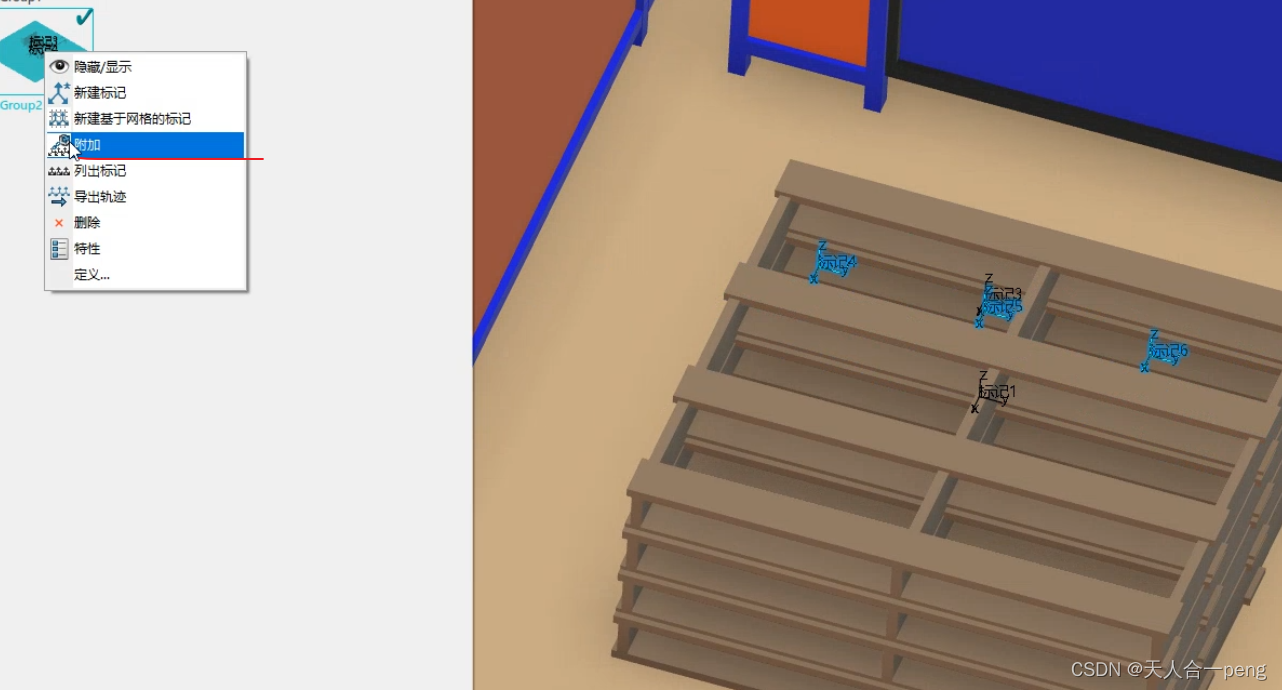
删除标记123
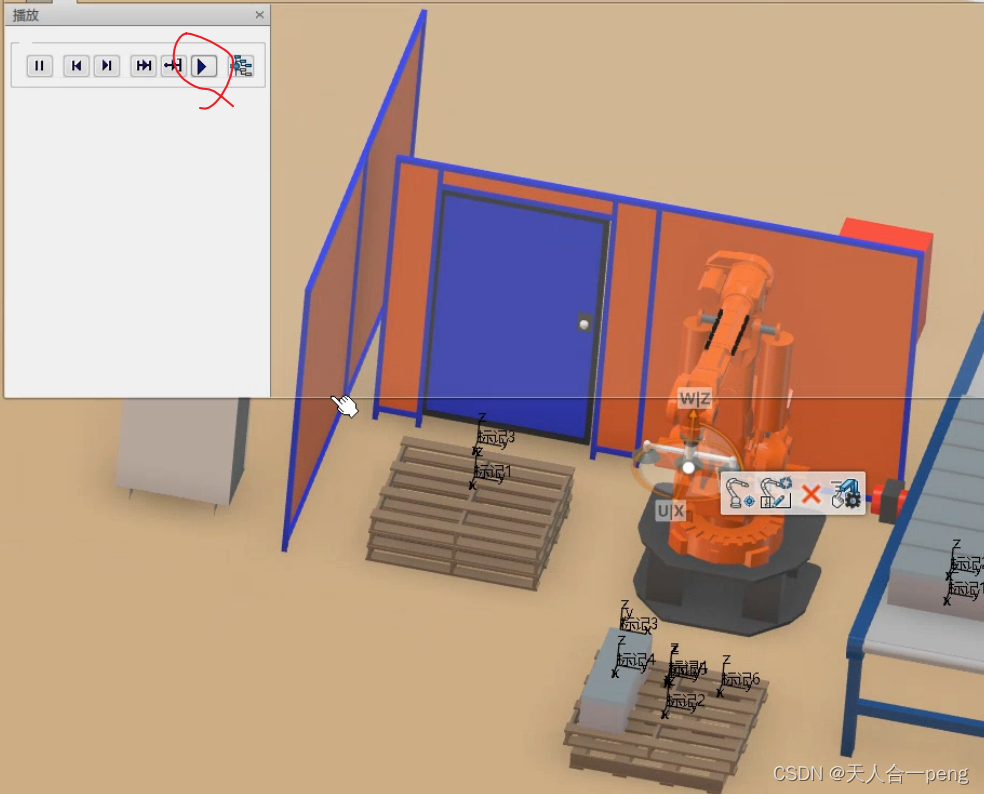
3 动画播放

退出
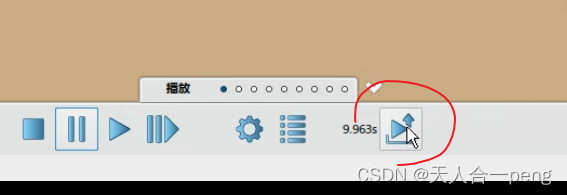
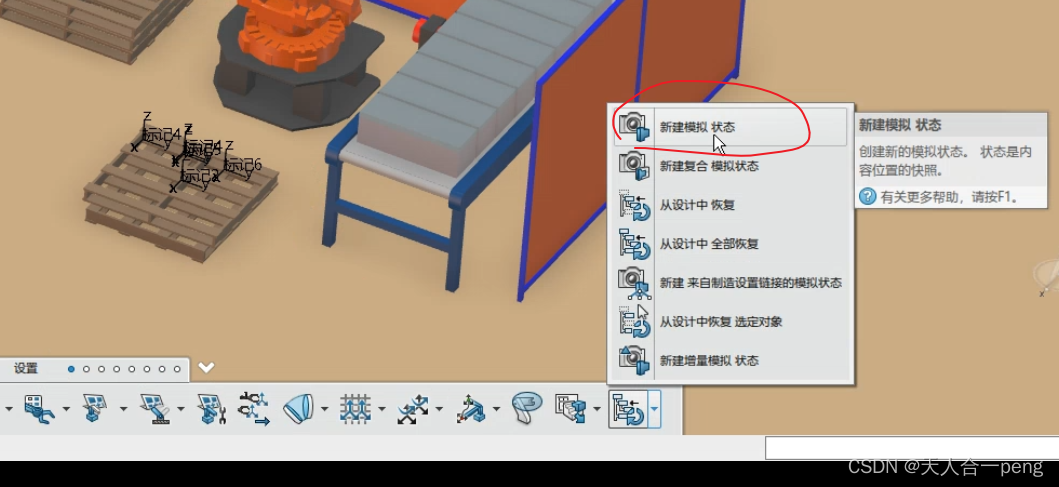
或可以通过下面方式查看动画
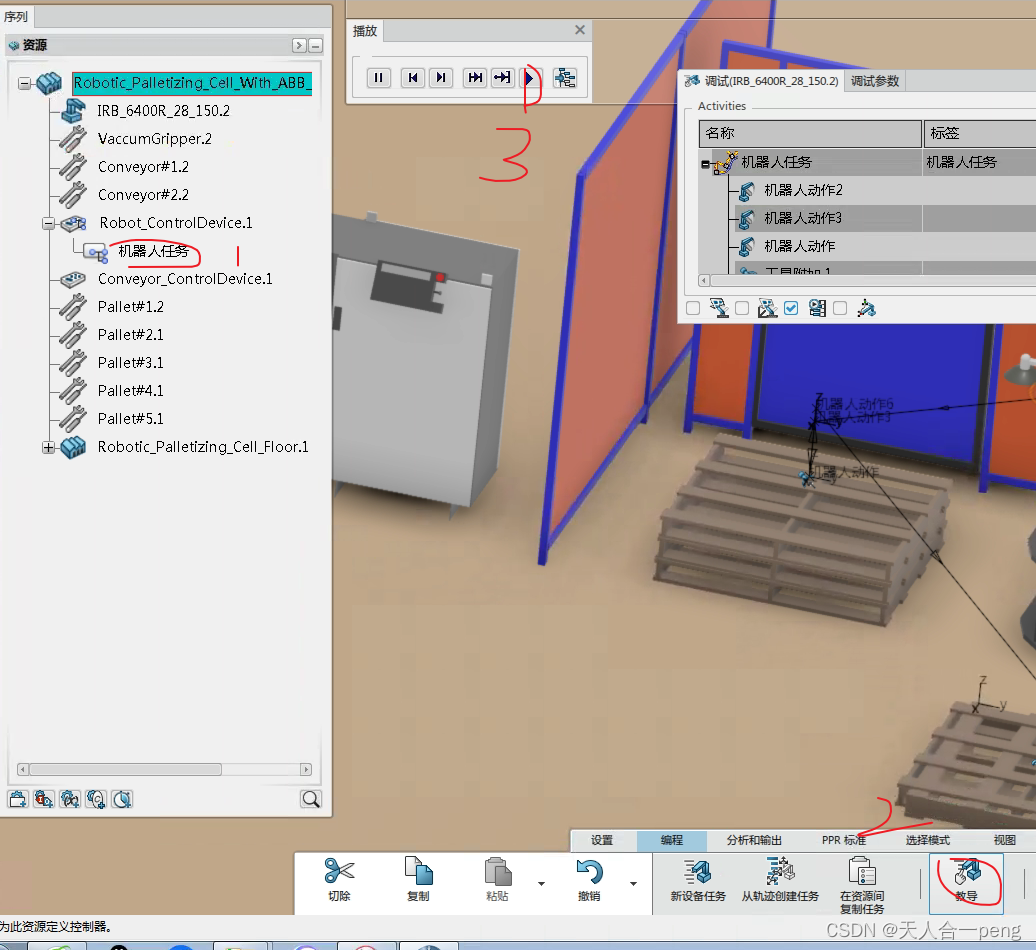
然后新建运动状态
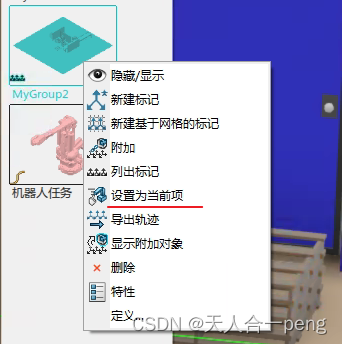
4 设置标记组并设为当前

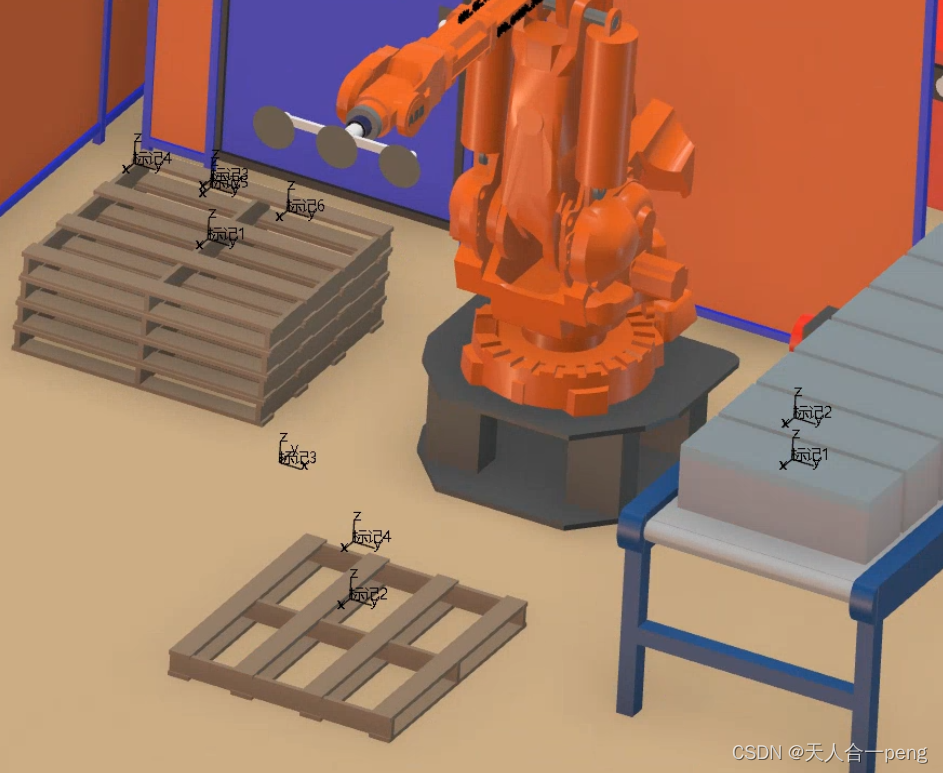
5 建标记点
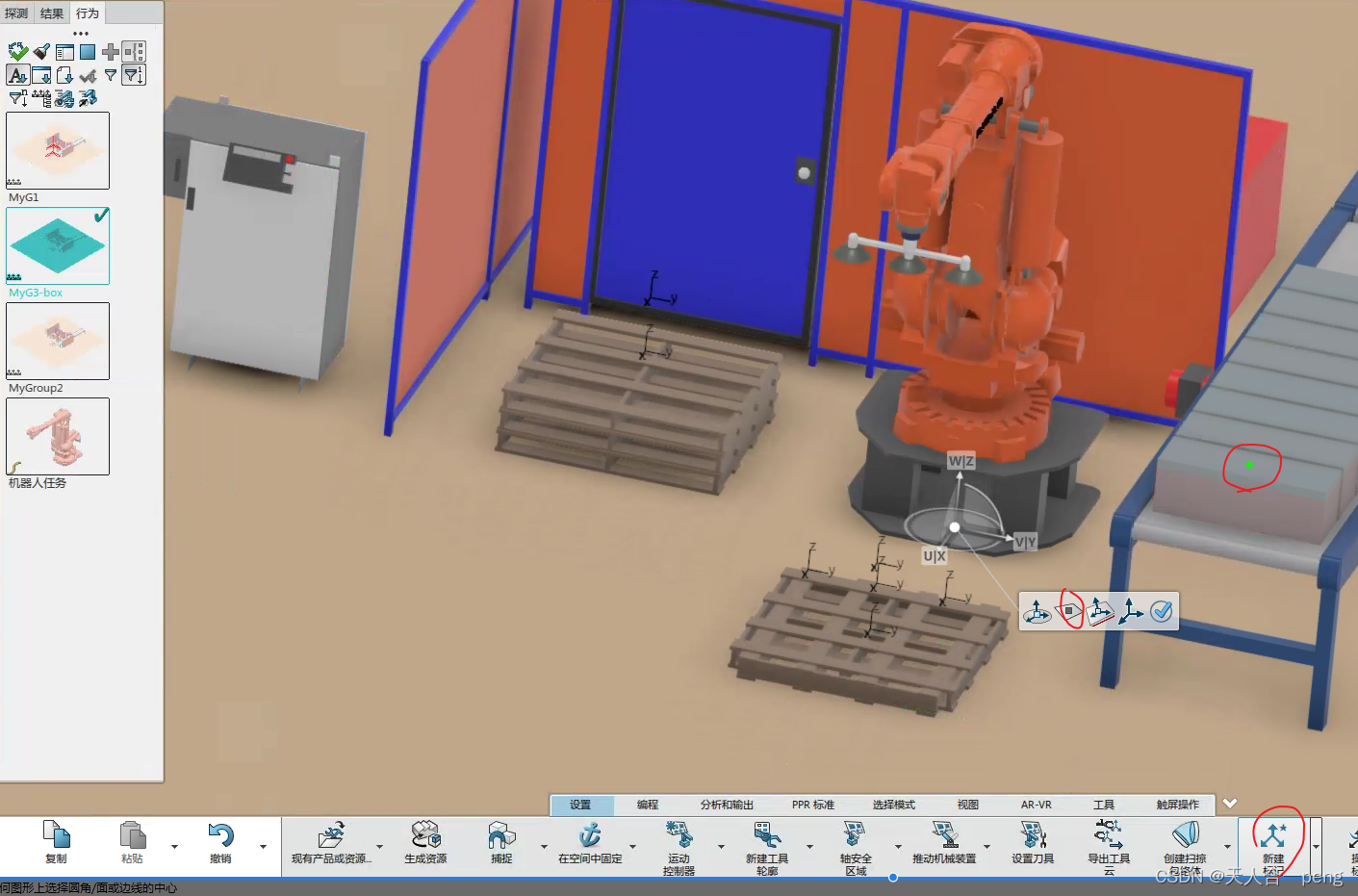
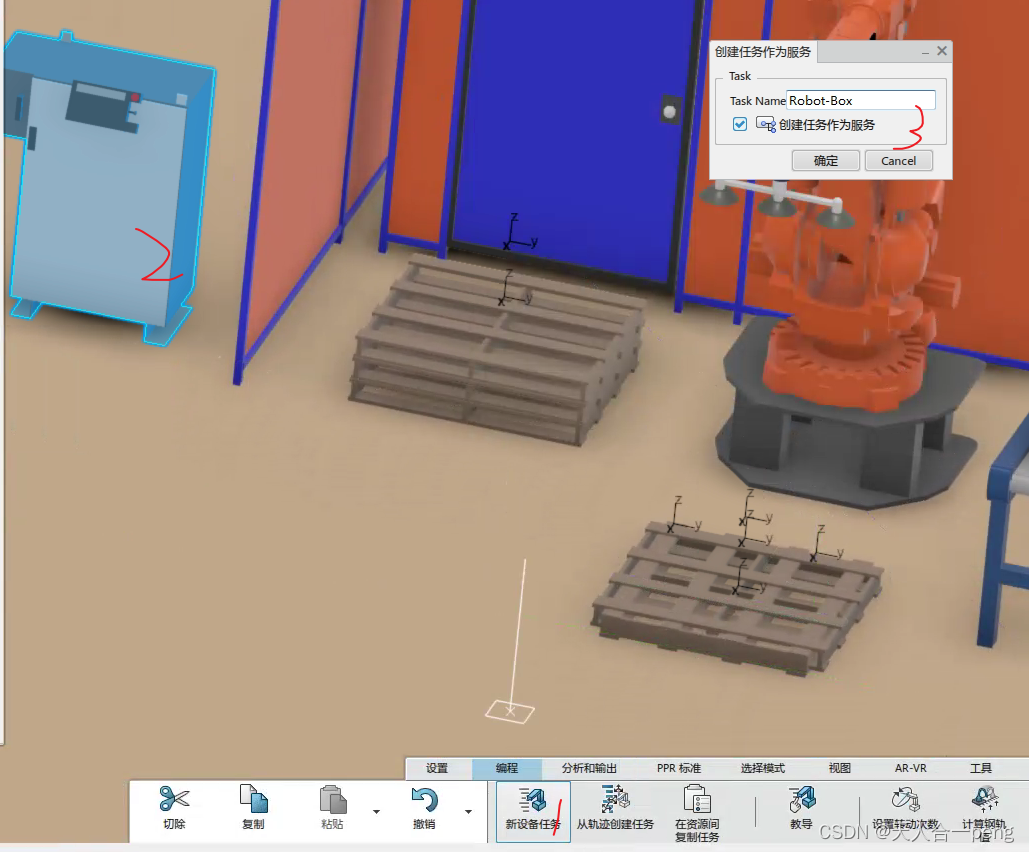
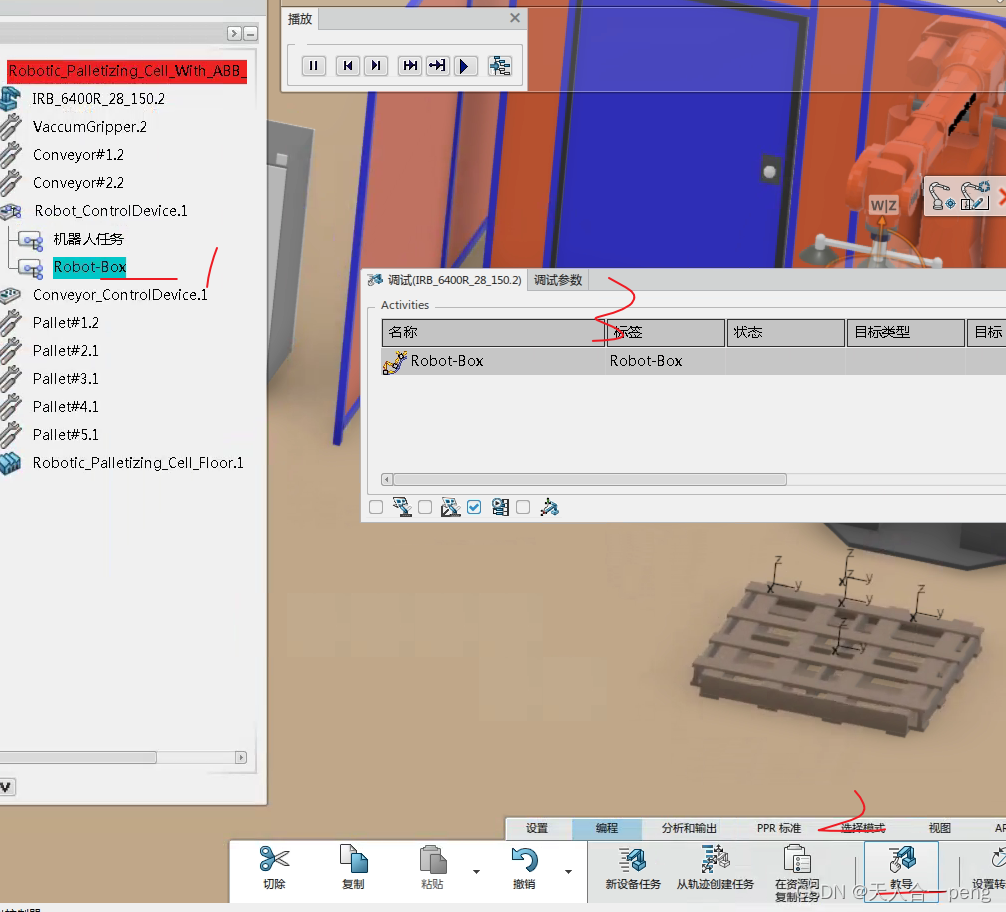
6 建设备任务
7 设置教导
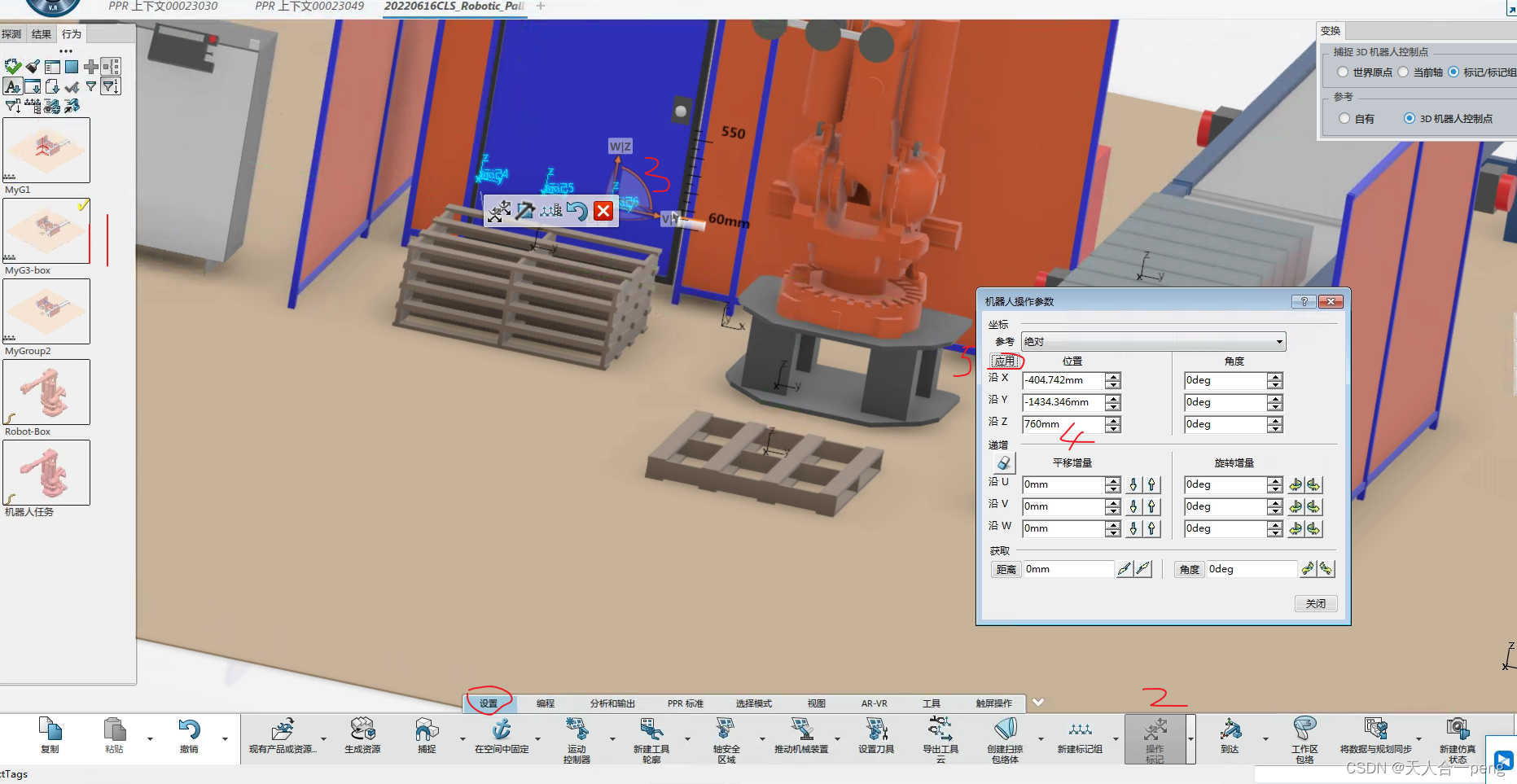
8 插入点目标
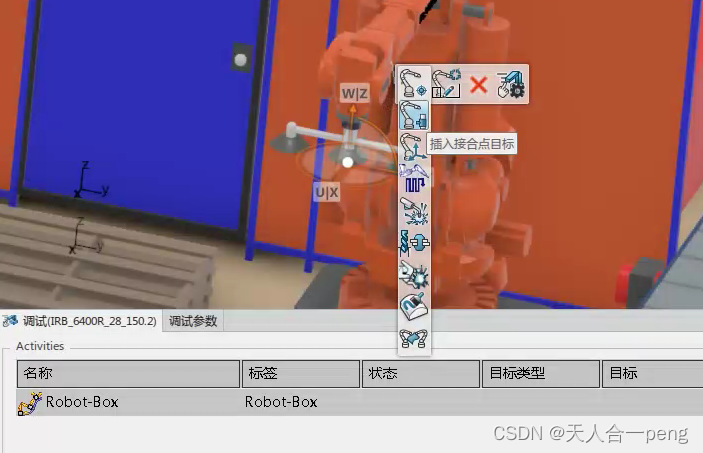
单击刚点的标记,机器人就会过来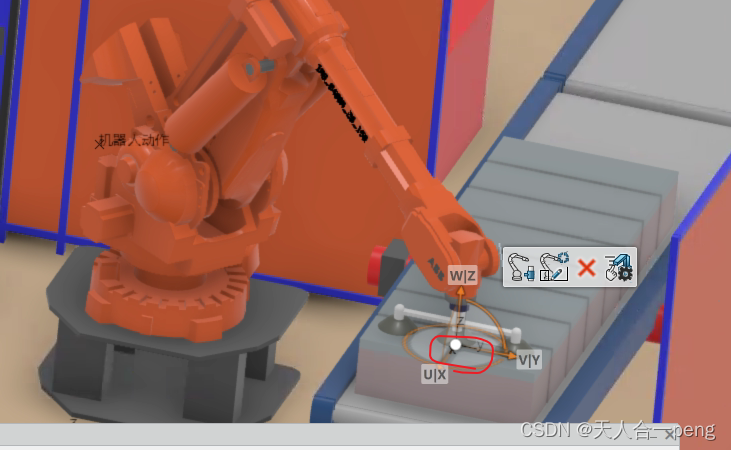
双击机器人坐标
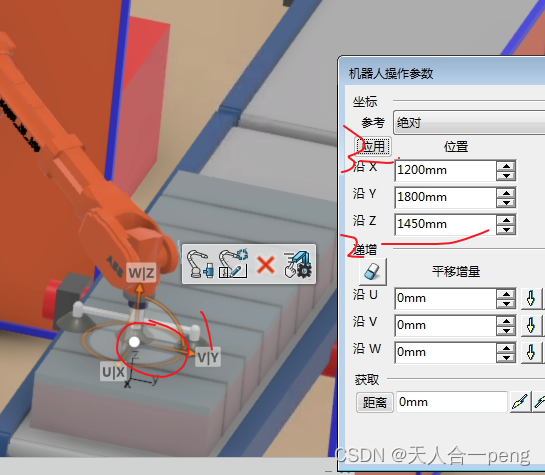
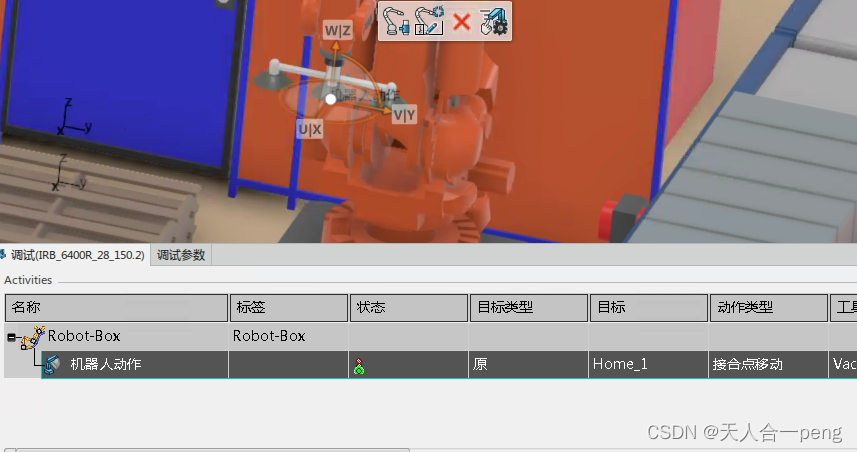
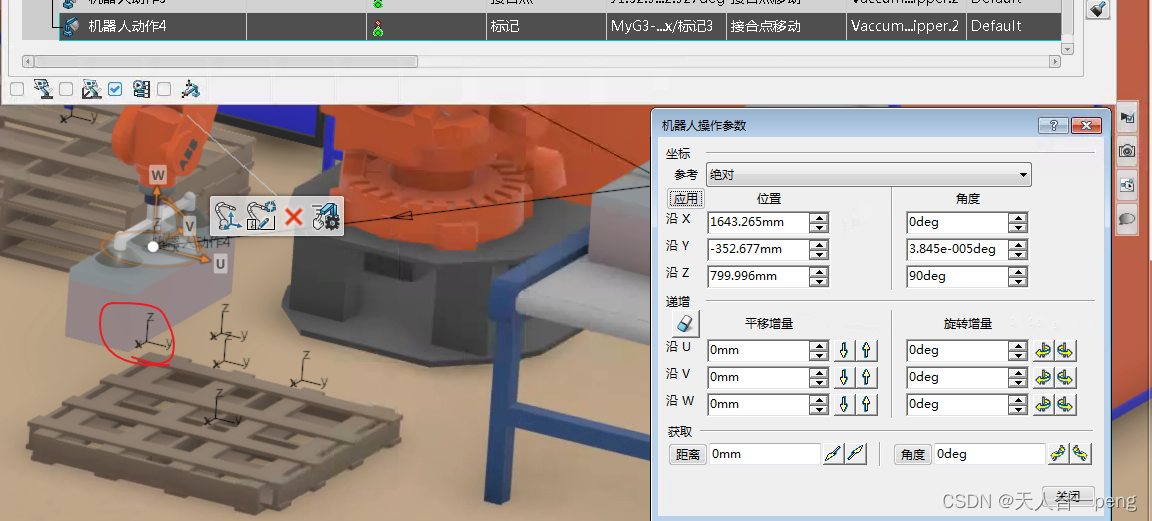
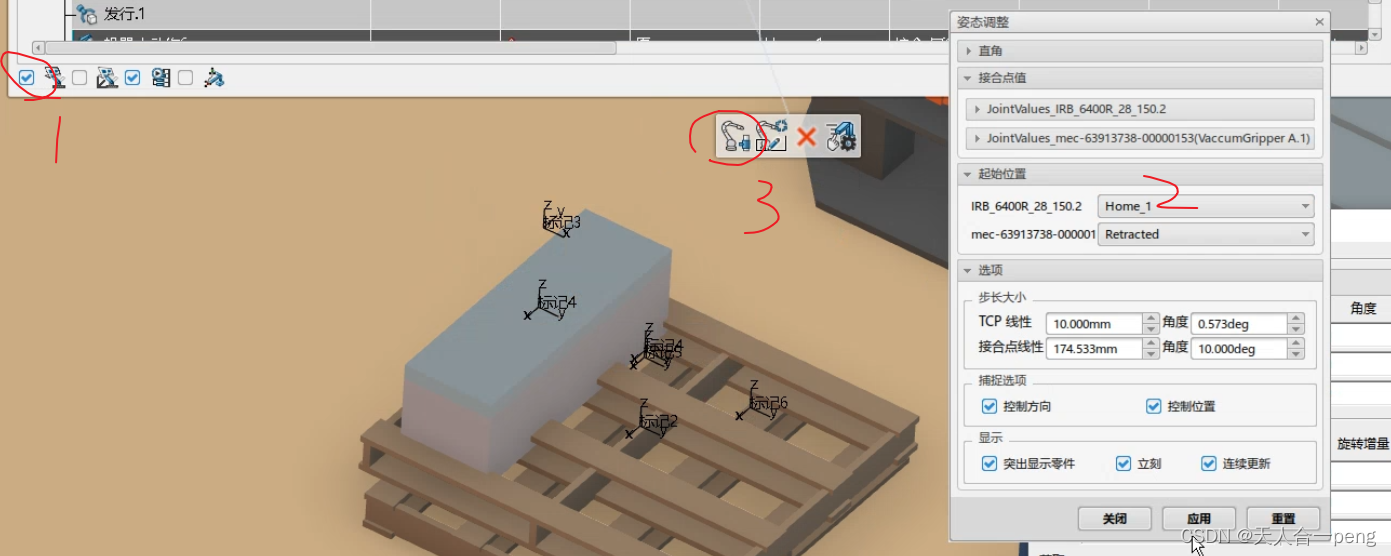
9 插入直角坐标
上面设置完后机器人未端变高
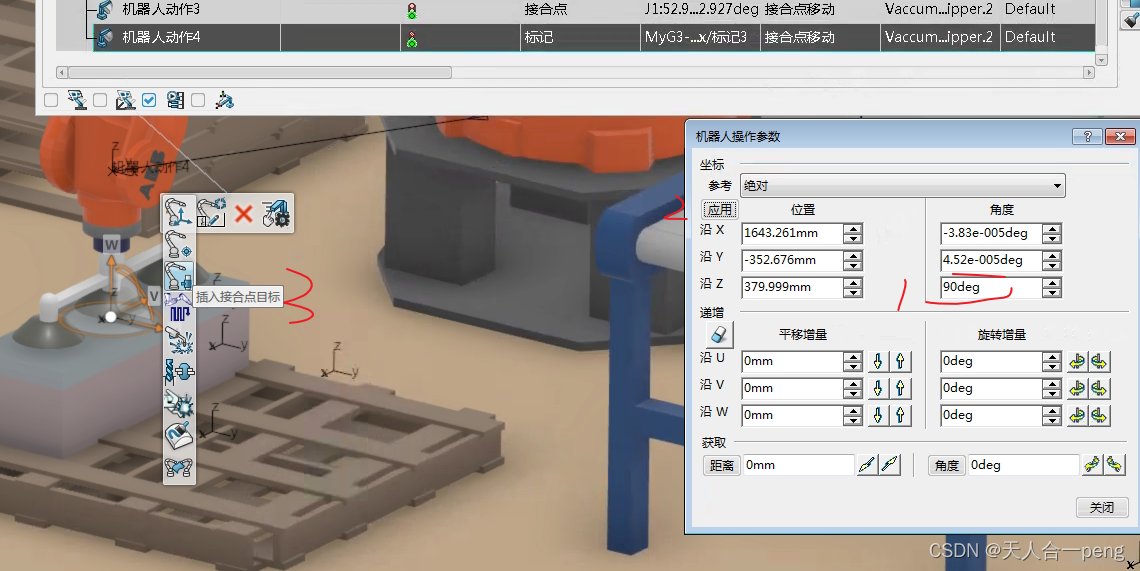
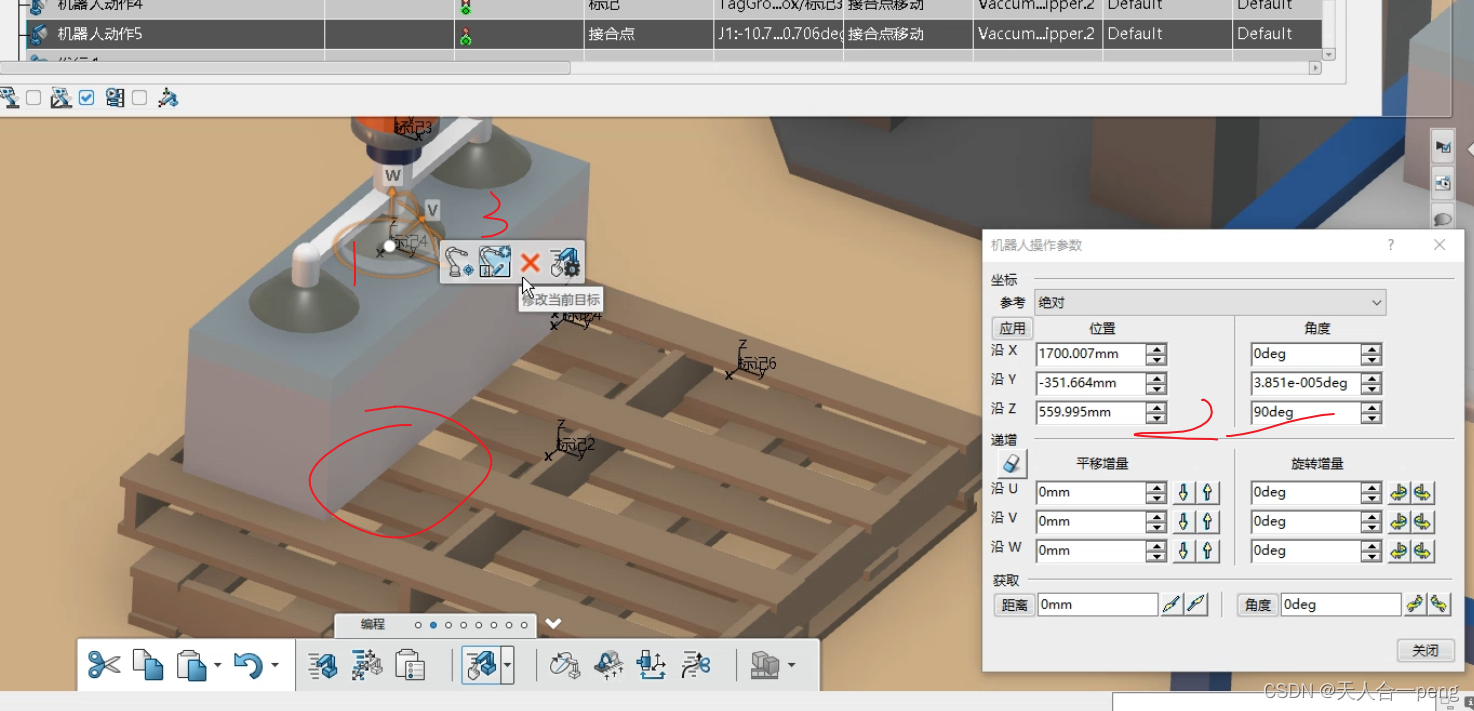
单击物体的坐标标记,机器人会下来,然后插入---接合点目标

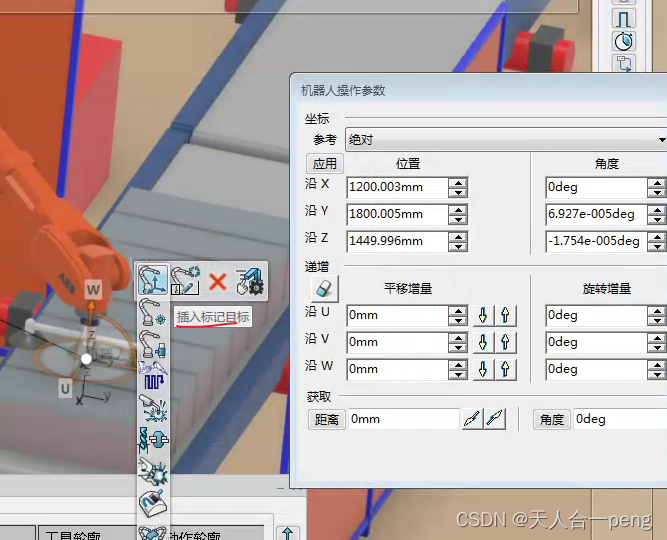
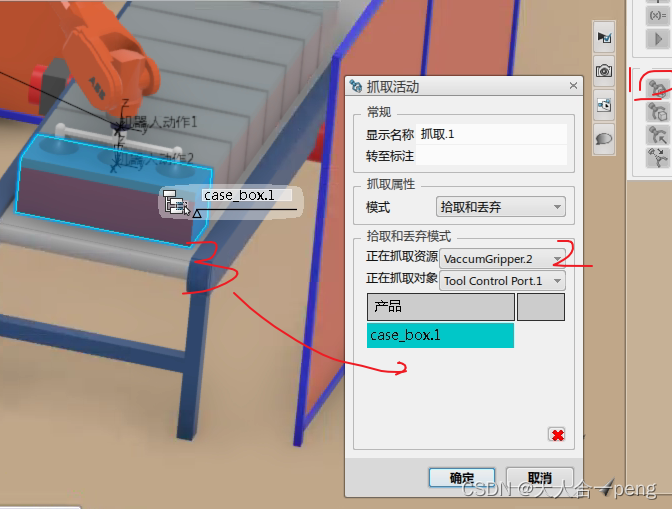
10 物体抓取设置
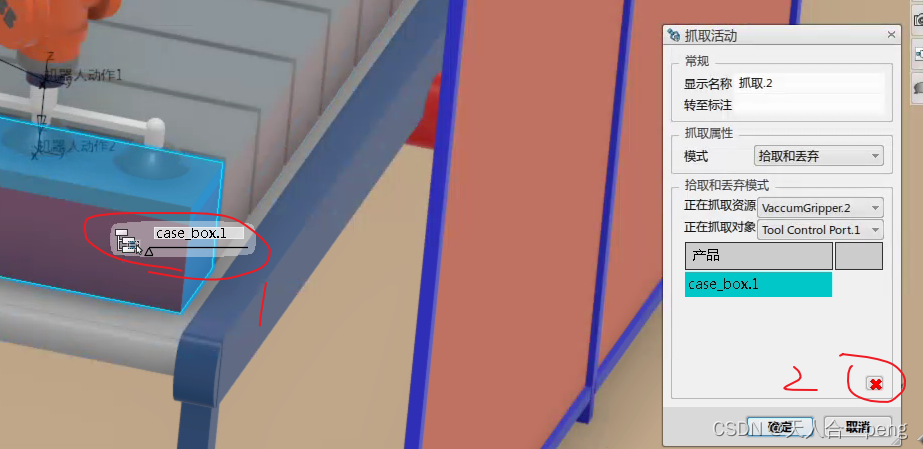
刚选完后1中的图标可以托动,如果不行就通过2删除,再选就可以左右托动,移动到最左
11 单击物体上方的坐标,机械臂会上移,并选接合点移动
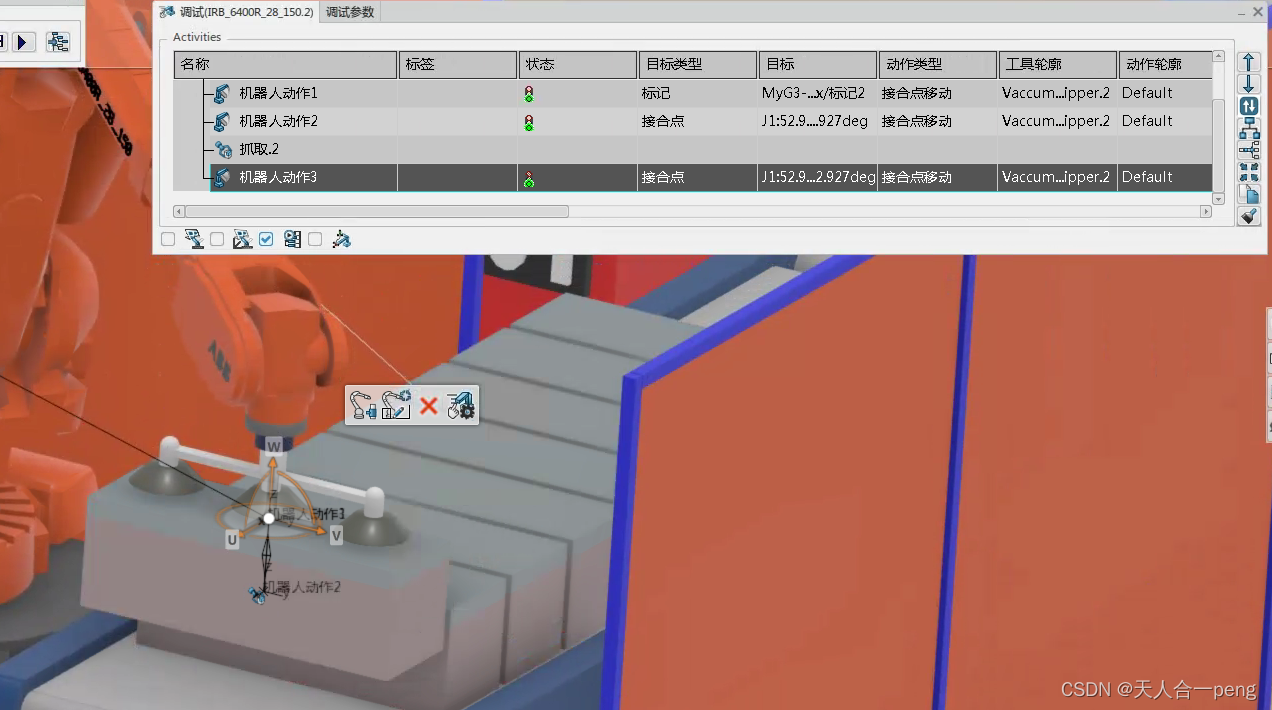

选中上面的红色部分
12零件释放

13 插入接合点移动
这时运行动画物体的运动会有偏离
14 设计恢复
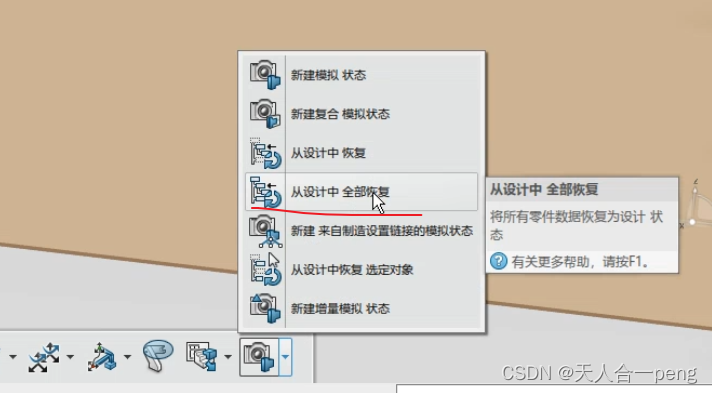
或者F3在PPR树父节点双击还原,如下
15 可以看到两个任务的动画
通过选中任务--教导
运行前设计恢复一下
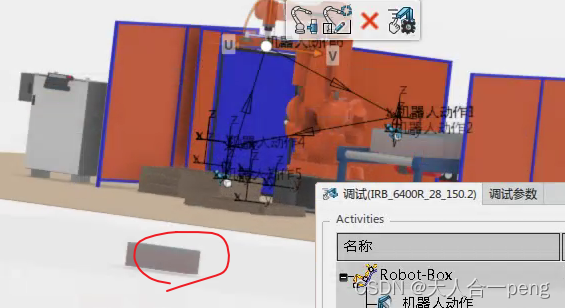
16 操作标记设置
17 教导运行
对其中有问题的部分修改
零件尺寸相互干涉,这样就可修改合适的位置
修改完要设计恢复
相关文章
- C#,人工智能,机器人,路径规划,A*(AStar Algorithm)算法、源代码及计算数据可视化
- AI人工智能外呼机器人测试项目经历
- ROS机器人程序设计(原书第2版)2.4.7 如何使用服务
- 2、matlab串联机器人正反解计算
- 《乐高EV3机器人搭建与编程》——1.6 小结
- 《乐高EV3机器人搭建与编程》一1.6 小结
- 《JavaScript机器人编程指南》——第1章 开始学习JS机器人技术
- 【Matlab 六自由度机器人】关于机器人运动学反解的有关问题
- ROS机器人操作系统查看机械臂当前位姿
- 通过虚拟现实实现操纵机器人的控制界面
- 《机器人编程实战》一一1.3 下文预告
- 美国大选中20%的Twitter消息来自聊天机器人
- Twitter月活用户3.19亿,15%是机器人
- OTTO机器人之避障功能实现
- 【历史上的今天】2 月 16 日:世界上第一个 BBS 诞生;中国计算机教育开端;IBM 机器人赢得智能竞赛
- robot(1):关于机器人和互联网的思考
- 科沃斯对AI+商用服务机器人的思考
- ROS机器人开发实践学习笔记3
- ROS机器人开发实践学习笔记1