
【控制】目录和总结
控制 总结 目录
2023-09-27 14:20:36 时间
1、前轮反馈控制法(Stanley)
2、纯跟踪法(Pure Pursuit)
3、模型预测控制(MPC)
4、PID和LQR
5、模糊控制
1、PID
- 优点:不依赖于精确的系统模型。
- 缺点:无法抑制系统参数不确定性以及外部扰动对纵向控制性能的影响。对不同车、不同路况都要调,很难适应所有环境达到最优。
- 适用范围:路径曲率较小及低速的跟踪场景
2、模糊逻辑控制
- 优点:不需要精确的系统建模
- 缺点:制定实用的规则库依赖于先验的专家知识,通常需要进行大量的试验标定
基于几何学模型
- 基于几何学模型:指无人驾驶车辆转向操纵时的几何关系,其中包括车辆与参考路径间的相对位姿关系和阿克曼转向几何关系。基于几何学模型的无人驾驶车辆路径跟踪控制的经典算法有纯追踪算法和Stanley 算法。
1、纯跟踪(Pue Pursuit)
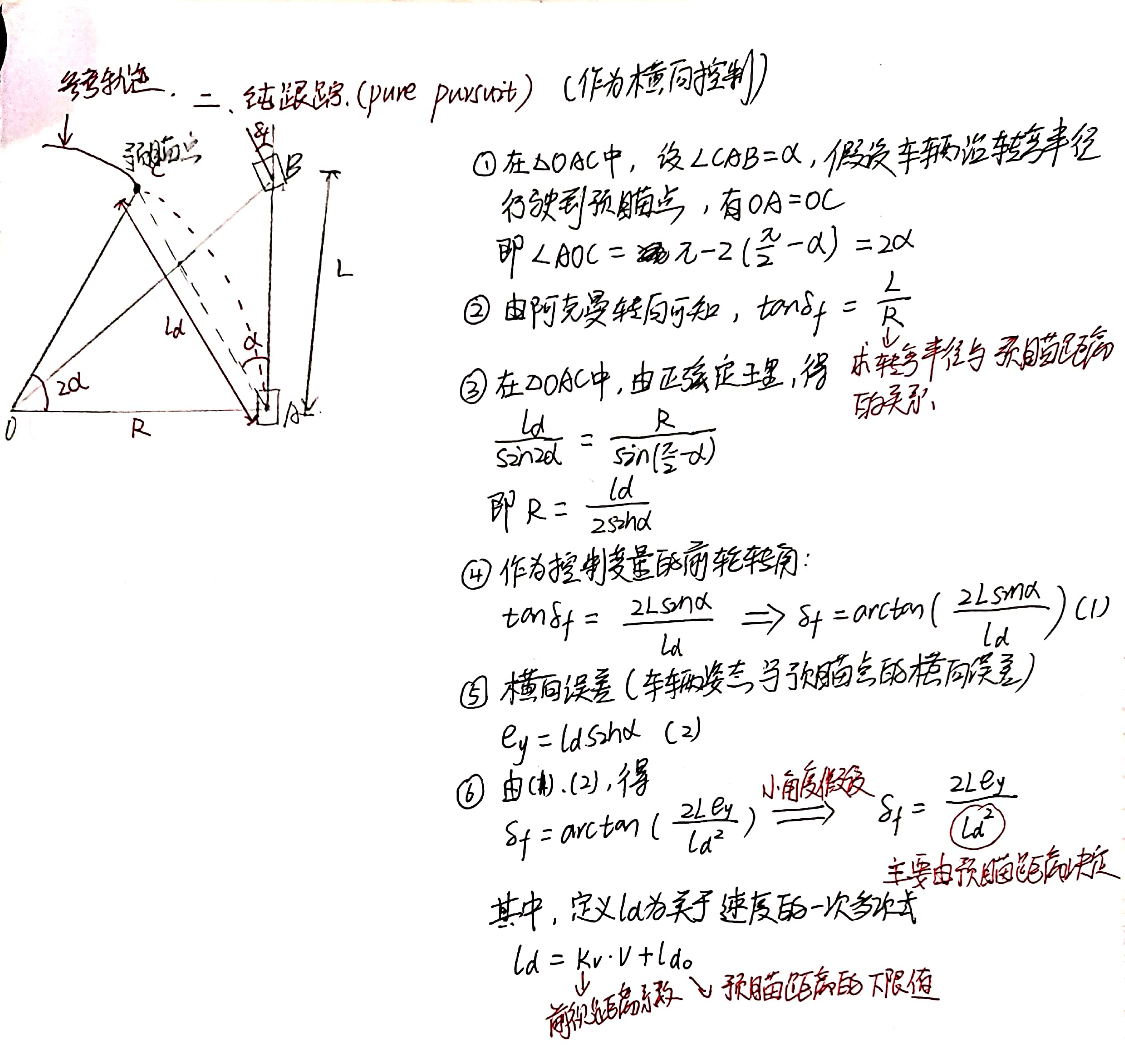
- 基本原理:通过控制车辆的转向半径 R ,使车辆后轴中心的控制点沿圆弧到达预瞄距离为 l d l_d ld 的预瞄点,然后基于阿克曼转向模型计算得到控制所需前轮转角。纯追踪算法的核心在于预瞄距离 l d l_d ld 的选取,预瞄距离过小会使车辆行驶路径产生振荡,而过大则会导致车辆过弯时拐小弯。
- 优点:对道路曲率的扰动具有良好的鲁棒性(不是关于曲率的等式)
- 缺点:1. 跟踪性能严重依赖预瞄距离的选择,最优值很难获取。2.纯追踪算法是基于简单的几何学模型,并未考虑车辆动力学特性和转向执行器动态特性。高速下转向曲率的快速变化易使车辆产生侧滑,系统模型与实际车辆特性相差较大会导致跟踪性能恶化
- 适用范围:多适用于较低车速和小侧向加速度下的路径跟踪控制
2、前轮反馈控制法(Stanley)
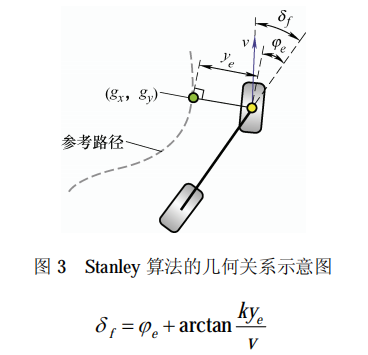
- 基本原理:Stanley 算法是根据前轴中心控制点到最近的参考轨迹点的横向位置误差和航向角误差对前轮转角进行控制,前轮转角控制量由两部分组成:一部分是航向误差引起的转角,即当前车身方向与参考轨迹最近点的切线方向的夹角;另一部分是横向误差引起的转角,即前轮中心到参考轨迹最近点的横向误差。该控制器为非线性反馈控制,可以保证横向误差指数收敛到 0。增益参数K决定了收敛速度。
- 优点:Stanley 算法相比于纯追踪控制算法更适用于相对更高车速的行驶工况,但是对路径的平滑程度要求较高。
- 缺点:1.在道路曲率光滑性不理想的情况下容易出现车辆响应超调过大的问题。 2.由于忽略了车辆动力学特性和转向执行器动态特性,在当车辆侧向加速度较大时跟踪性能较差。(通过航向角速度偏差补偿和转向修正等方式改进了控制律)
- 适用范围:适用于路径平滑的中低速跟踪场景
基于运动学模型
- 基本原理:与依赖于车辆位姿关系和阿克曼转向的几何学模型不同,运动学模型进一步考虑了车辆的运动方程,但不涉及车辆本身物理性质(如质量等)和作用在车辆上的力。
- 优点:基于运动学模型的路径跟踪控制方法不依赖于车辆动力学模型,简单实用,在中低速和小曲率工况下,通常具有较好的控制效果。
- 缺点:实际车辆在大侧向加速度工况下运动时存在较为明显的侧滑,不满足非完整约束条件的前提假设,所以基于运动学模型的方法不适用于高速和大侧向加速度工况。
相关文章
- ZooKeeper设置ACL权限控制,删除权限
- 双轴机械臂串口控制命令开发与测试:STM32F103控制板,简易调试命令集合
- 对于STM32F103控制的三轴机械臂基本功能测试-关节转动控制
- 【MATLAB教程案例68~74总结】MATLAB控制类算法仿真经验和技巧总结
- Python的流程控制
- Nginx 笔记与总结(2)信号控制
- 《无人机DIY》——2.10 3D打印的无线电控制小艇
- 360浏览器内核控制标签meta说明
- SwiftUI进阶之 16 软件开发如何控制复杂性? (《SICP》学习笔记)
- UR机械臂学习(8):Python实现机械臂运动控制(不使用MoveIt)
- 强化学习学习笔记(四):具有时差(TD)和Q学习的无模型预测与控制
- Linear推出以太网供电控制IC 可满足较高功率输送需求
- 【Verilog基础】在不同时钟域之间如何安全地传递信号方法总结(3)多bit 控制/数据 信号跨时钟域传输(异步FIFO))
- 【龙芯1B】:LCD显示图片&文字&背景色&前景色、小创语音控制lcd显示、数码管倒计时
- 文件控制