
Stacked hourglass networks for human pose estimation代码学习
Stacked hourglass networks for human pose estimation
https://github.com/princeton-vl/pytorch_stacked_hourglass
这是一个用于人体姿态估计的模型,只能检测单个人
作者通过重复的bottom-up(高分辨率->低分辨率)和top-down(低分辨率->高分辨率)以及中间监督(深监督)来提升模型的性能
模型
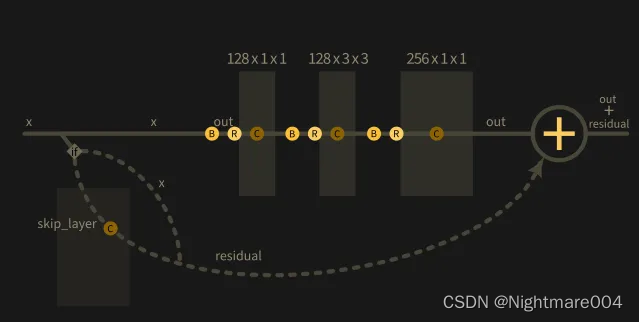
残差
模型里的残差都是不改变分辨率的
class Conv(nn.Module):
def __init__(self, inp_dim, out_dim, kernel_size=3, stride=1, bn=False, relu=True):
super(Conv, self).__init__()
self.inp_dim = inp_dim
self.conv = nn.Conv2d(inp_dim, out_dim, kernel_size, stride, padding=(kernel_size - 1) // 2, bias=True)
self.relu = None
self.bn = None
if relu:
self.relu = nn.ReLU()
if bn:
self.bn = nn.BatchNorm2d(out_dim)
def forward(self, x):
assert x.size()[1] == self.inp_dim, "{} {}".format(x.size()[1], self.inp_dim)
x = self.conv(x)
if self.bn is not None:
x = self.bn(x)
if self.relu is not None:
x = self.relu(x)
return x
class Residual(nn.Module):
def __init__(self, inp_dim, out_dim):
super(Residual, self).__init__()
self.relu = nn.ReLU()
self.bn1 = nn.BatchNorm2d(inp_dim)
self.conv1 = Conv(inp_dim, out_dim // 2, 1, relu=False)
self.bn2 = nn.BatchNorm2d(out_dim // 2)
self.conv2 = Conv(out_dim // 2, out_dim // 2, 3, relu=False)
self.bn3 = nn.BatchNorm2d(out_dim // 2)
self.conv3 = Conv(out_dim // 2, out_dim, 1, relu=False)
self.skip_layer = Conv(inp_dim, out_dim, 1, relu=False)
if inp_dim == out_dim:
self.need_skip = False
else:
self.need_skip = True
def forward(self, x): # ([1, inp_dim, H, W])
if self.need_skip:
residual = self.skip_layer(x) # ([1, out_dim, H, W])
else:
residual = x # ([1, out_dim, H, W])
out = self.bn1(x)
out = self.relu(out)
out = self.conv1(out) # ([1, out_dim / 2, H, W])
out = self.bn2(out)
out = self.relu(out)
out = self.conv2(out) # ([1, out_dim / 2, H, W])
out = self.bn3(out)
out = self.relu(out)
out = self.conv3(out) # ([1, out_dim, H, W])
out += residual # ([1, out_dim, H, W])
return out # ([1, out_dim, H, W])
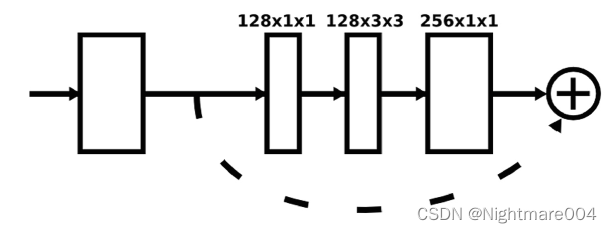
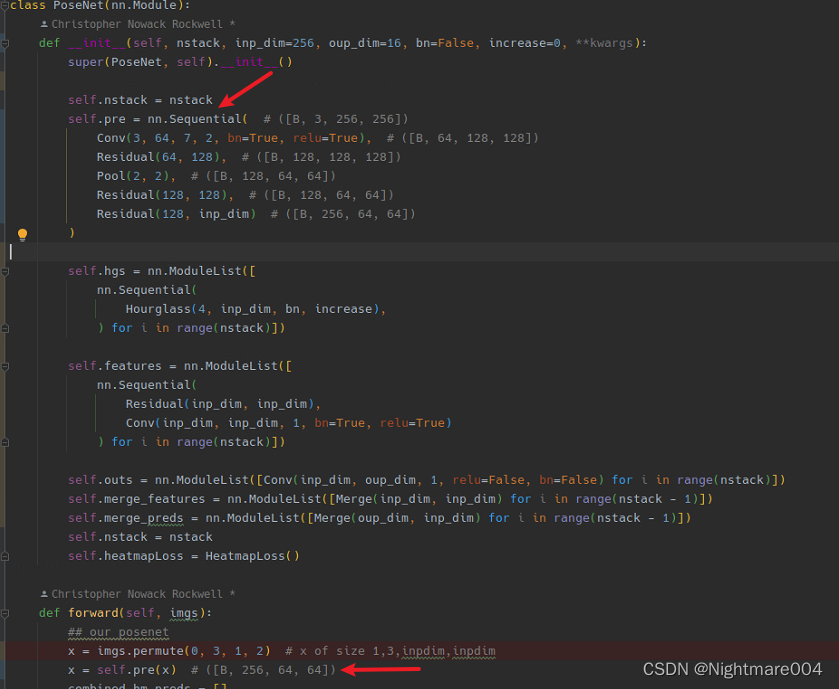
最前面
首先模型使用了一个卷积核为
7
∗
7
7*7
7∗7步长为2的卷积,然后使用了一个残差和下采样,将图像从
256
∗
256
256*256
256∗256降到了
64
∗
64
64*64
64∗64
接着接了两个残差
对应论文这一段

self.pre = nn.Sequential( # ([B, 3, 256, 256])
Conv(3, 64, 7, 2, bn=True, relu=True), # ([B, 64, 128, 128])
Residual(64, 128), # ([B, 128, 128, 128])
Pool(2, 2), # ([B, 128, 64, 64])
Residual(128, 128), # ([B, 128, 64, 64])
Residual(128, inp_dim) # ([B, 256, 64, 64])
)
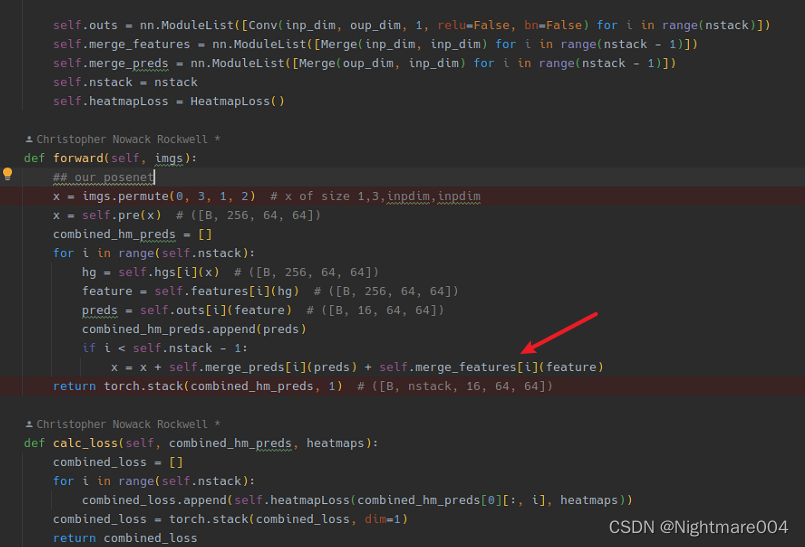
单个Hourglass
在每一次最大池化之前,模型会产生一个分支,一条最大池化,另一条会接卷积(残差)
合并之前,走最大池化的的分支会做一次上采样,然后两个分支按元素加
(对应论文这两句)
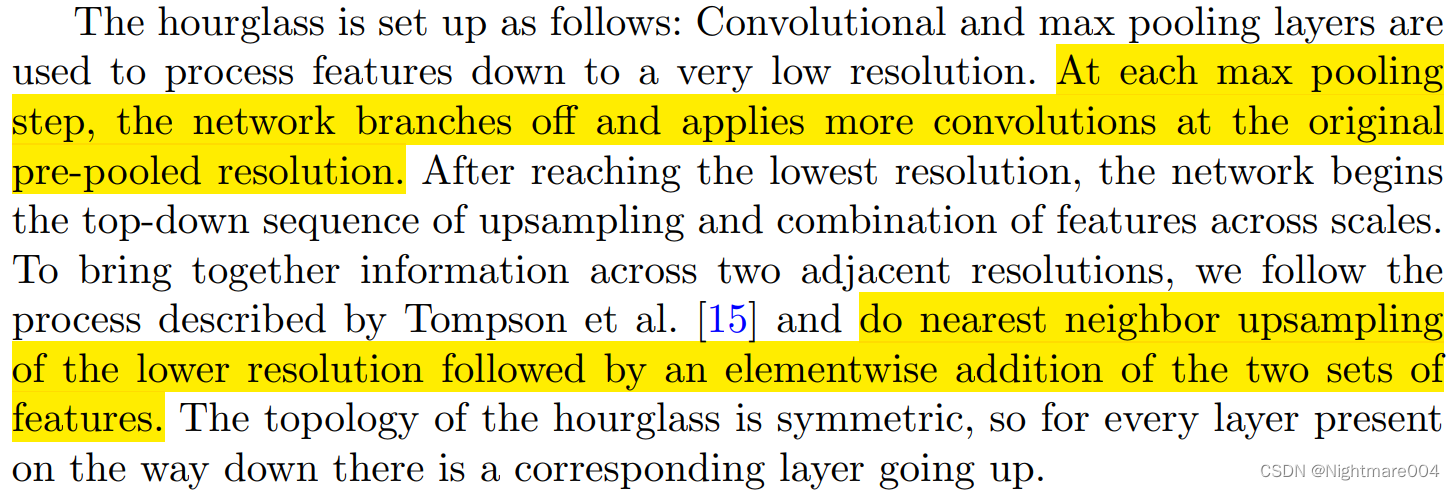
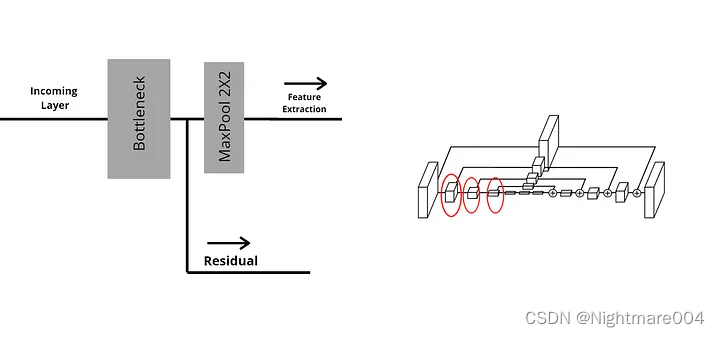
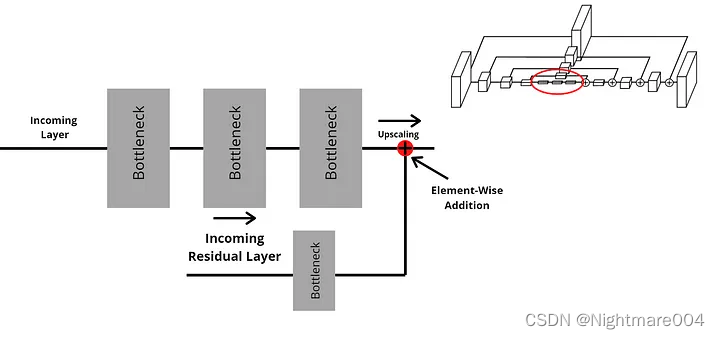
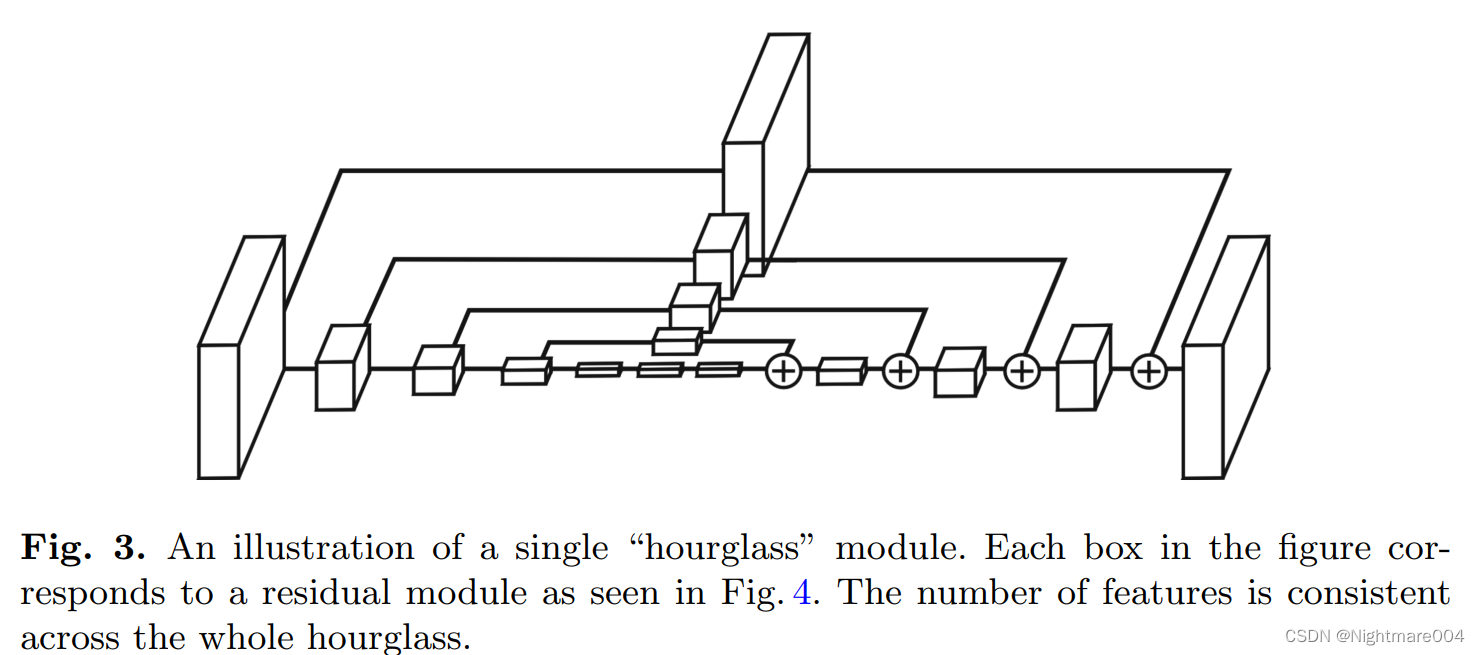
代码对应这个图
(然而论文的图里最前面的残差不知道怎么算。。。)
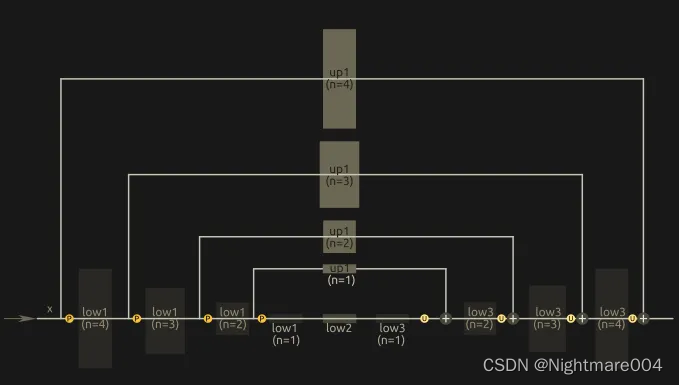
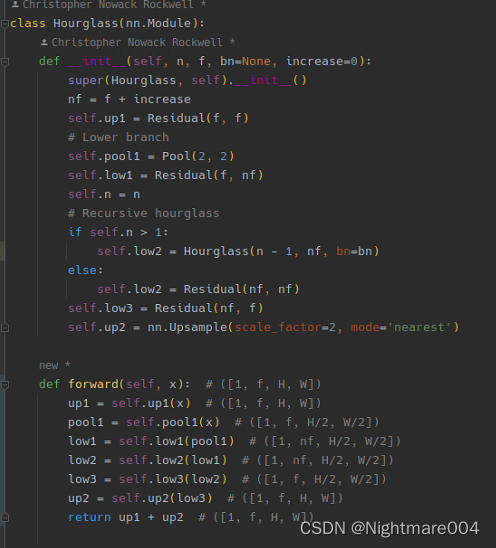
class Hourglass(nn.Module):
def __init__(self, n, f, bn=None, increase=0):
super(Hourglass, self).__init__()
nf = f + increase
self.up1 = Residual(f, f)
# Lower branch
self.pool1 = Pool(2, 2)
self.low1 = Residual(f, nf)
self.n = n
# Recursive hourglass
if self.n > 1:
self.low2 = Hourglass(n - 1, nf, bn=bn)
else:
self.low2 = Residual(nf, nf)
self.low3 = Residual(nf, f)
self.up2 = nn.Upsample(scale_factor=2, mode='nearest')
def forward(self, x): # ([1, f, H, W])
up1 = self.up1(x) # ([1, f, H, W])
pool1 = self.pool1(x) # ([1, f, H/2, W/2])
low1 = self.low1(pool1) # ([1, nf, H/2, W/2])
low2 = self.low2(low1) # ([1, nf, H/2, W/2])
low3 = self.low3(low2) # ([1, f, H/2, W/2])
up2 = self.up2(low3) # ([1, f, H, W])
return up1 + up2 # ([1, f, H, W])
热力图
模型会接两个
1
∗
1
1*1
1∗1的卷积来产生热力图(heatmap)

(虽然不知道为啥代码里还有一个残差)
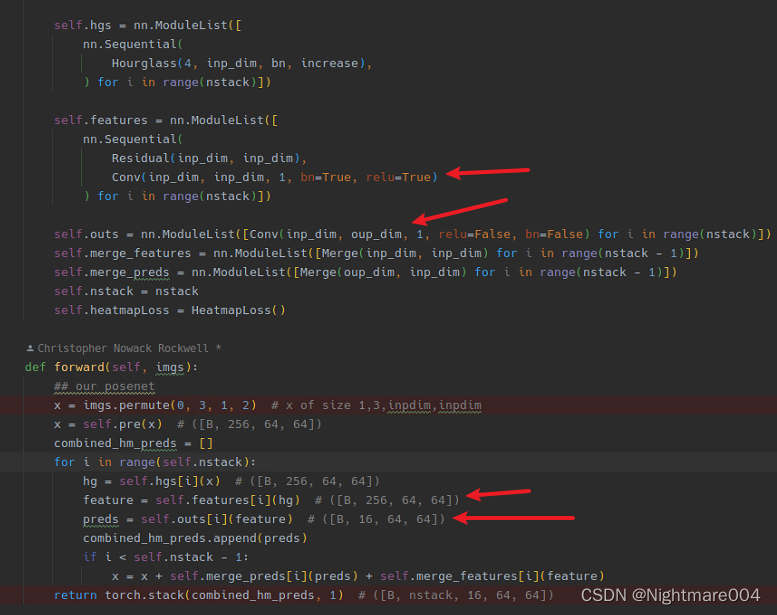
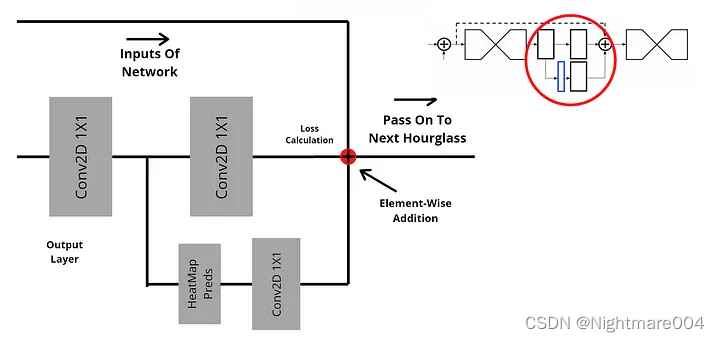
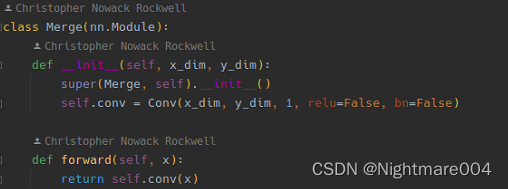
中间监督
将前一个Hourglass,heatmap,heatmap之前的特征通过2个
1
∗
1
1*1
1∗1的卷积加在一起

数据增强
img.py
这个需要一些仿射变换的知识(平移矩阵,旋转矩阵和放缩矩阵)
https://blog.csdn.net/qq_39942341/article/details/129440487?spm=1001.2014.3001.5501
首先是这个get_transform
他的主要作用是得到【在原图上面裁剪出以center为中心,scale*200的bbox,然后放缩到res大小,最后旋转】的矩阵
因为scale在标注里是除以200的,所以这里乘回去,得到原本的bbox大小
https://blog.csdn.net/qq_39942341/article/details/129289591?spm=1001.2014.3001.5502
首先是第一个矩阵t,可以拆成3个矩阵
有了仿射变换的知识,就知道他是先将bbox平移到中心在原点
然后放缩
最后将bbox平移到左上角在原点
(
f
l
o
a
t
(
r
e
s
[
1
]
)
/
h
0
−
r
e
s
[
1
]
∗
f
l
o
a
t
(
c
e
n
t
e
r
[
0
]
)
/
h
+
0.5
r
e
s
[
1
]
0
f
l
o
a
t
(
r
e
s
[
0
]
)
/
h
−
r
e
s
[
0
]
∗
f
l
o
a
t
(
c
e
n
t
e
r
[
1
]
)
/
h
+
0.5
r
e
s
[
0
]
0
0
1
)
=
(
1
0
0.5
r
e
s
[
1
]
0
1
0.5
r
e
s
[
0
]
0
0
1
)
(
f
l
o
a
t
(
r
e
s
[
1
]
)
/
h
0
0
0
f
l
o
a
t
(
r
e
s
[
0
]
)
/
h
0
0
0
1
)
(
1
0
−
c
e
n
t
e
r
[
0
]
0
1
−
c
e
n
t
e
r
[
1
]
0
0
1
)
\begin{aligned} &\begin{pmatrix} float(res[1]) / h & 0 & -res[1] * float(center[0]) / h + 0.5 res[1]\\ 0 & float(res[0]) / h & -res[0] * float(center[1]) / h + 0.5 res[0]\\ 0 & 0 & 1\\ \end{pmatrix} \\ =& \begin{pmatrix} 1&0&0.5 res[1]\\ 0&1&0.5 res[0]\\ 0&0&1 \end{pmatrix}\begin{pmatrix} float(res[1]) / h&0&0\\ 0&float(res[0]) / h&0\\ 0&0&1 \end{pmatrix}\begin{pmatrix} 1&0&-center[0]\\ 0&1&-center[1]\\ 0&0&1 \end{pmatrix} \end{aligned}
=
float(res[1])/h000float(res[0])/h0−res[1]∗float(center[0])/h+0.5res[1]−res[0]∗float(center[1])/h+0.5res[0]1
1000100.5res[1]0.5res[0]1
float(res[1])/h000float(res[0])/h0001
100010−center[0]−center[1]1
(灵魂作图)
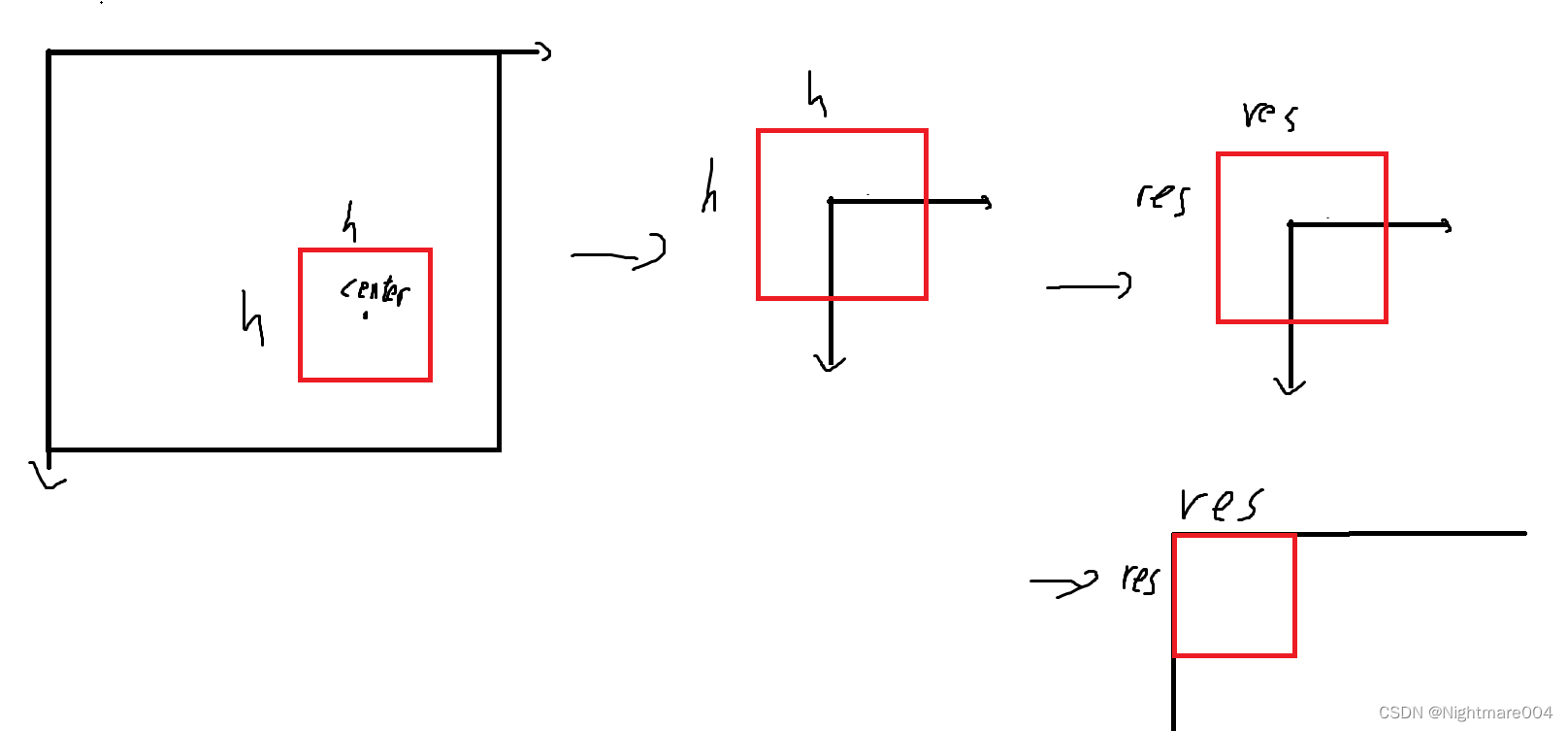
接下去那个rot,就是以【图片中心】为中心的旋转
def get_transform(center, scale, res, rot=0):
# Generate transformation matrix
h = 200 * scale
t = np.zeros((3, 3))
# first shift(so that the image's center is at (0,0))
# second scale to (res[1], res[0])
# third shift (so that the image's center is not (0,0) but (0,5res[1], 0.5res[0]))
# float(res[1]) / h 0 -res[1] * float(center[0]) / h + .5 res[1]
# 0 float(res[0]) / h -res[0] * float(center[1]) / h + .5 res[0]
# 0 0 1
t[0, 0] = float(res[1]) / h
t[1, 1] = float(res[0]) / h
t[0, 2] = res[1] * (-float(center[0]) / h + .5)
t[1, 2] = res[0] * (-float(center[1]) / h + .5)
t[2, 2] = 1
if not rot == 0:
rot = -rot # To match direction of rotation from cropping
rot_mat = np.zeros((3, 3))
rot_rad = rot * np.pi / 180
sn, cs = np.sin(rot_rad), np.cos(rot_rad)
# cs -sn 0
# sn cs 0
# 0 0 1
rot_mat[0, :2] = [cs, -sn]
rot_mat[1, :2] = [sn, cs]
rot_mat[2, 2] = 1
# Need to rotate around center
# 1 0 -res[1] / 2
# 0 1 -res[0] / 2
# 0 0 1
t_mat = np.eye(3)
t_mat[0, 2] = -res[1] / 2
t_mat[1, 2] = -res[0] / 2
# 1 0 res[1] / 2
# 0 1 res[0] / 2
# 0 0 1
t_inv = t_mat.copy()
t_inv[:2, 2] *= -1
t = np.dot(t_inv, np.dot(rot_mat, np.dot(t_mat, t)))
return t
transform
接着这个函数就简单了
将pt变成齐次坐标系,然后变换
def transform(pt, center, scale, res, invert=0, rot=0):
# Transform pixel location to different reference
t = get_transform(center, scale, res, rot=rot)
if invert:
t = np.linalg.inv(t)
new_pt = np.array([pt[0], pt[1], 1.]).T
new_pt = np.dot(t, new_pt)
return new_pt[:2].astype(int)
crop
接着是裁剪
先找到
(
0
,
0
)
(0,0)
(0,0)在原图中的位置(即bbox的左上角)
然后类似地找右下角
(其实这里完全不用矩阵,可以直接算出来)
h = scale * 200
ul = (center - h / 2).astype(int)
br = (center + h / 2).astype(int)
有了左上角和右上角,就可以确定bbox的大小
接着就是裁剪以及放缩到res大小
def crop(img, center, scale, res, rot=0):
# Upper left point
ul = np.array(transform([0, 0], center, scale, res, invert=1))
# Bottom right point
br = np.array(transform(res, center, scale, res, invert=1))
new_shape = [br[1] - ul[1], br[0] - ul[0]]
if len(img.shape) > 2:
new_shape += [img.shape[2]]
new_img = np.zeros(new_shape)
# Range to fill new array
new_x = max(0, -ul[0]), min(br[0], len(img[0])) - ul[0]
new_y = max(0, -ul[1]), min(br[1], len(img)) - ul[1]
# Range to sample from original image
old_x = max(0, ul[0]), min(len(img[0]), br[0])
old_y = max(0, ul[1]), min(len(img), br[1])
new_img[new_y[0]:new_y[1], new_x[0]:new_x[1]] = img[old_y[0]:old_y[1], old_x[0]:old_x[1]]
return cv2.resize(new_img, res)
kpt_affine
这个是关键点的仿射变换
def kpt_affine(kpt, mat):
kpt = np.array(kpt)
shape = kpt.shape
kpt = kpt.reshape(-1, 2)
# turn to Homogeneous coordinates then np.dot
return np.dot(np.concatenate((kpt, kpt[:, 0:1] * 0 + 1), axis=1), mat.T).reshape(shape)
dp.py
首先是数据集
其实就是读图,裁剪出人,增强,热力图
class Dataset(torch.utils.data.Dataset):
def __init__(self, config, ds, index):
self.input_res = config['train']['input_res'] # 256
self.output_res = config['train']['output_res'] # 64
# config['inference']['num_parts'] = 16
self.generateHeatmap = GenerateHeatmap(self.output_res, config['inference']['num_parts'])
self.ds = ds
self.index = index
def __len__(self):
return len(self.index)
def __getitem__(self, idx):
return self.loadImage(self.index[idx % len(self.index)])
def loadImage(self, idx):
ds = self.ds
## load + crop
orig_img = ds.get_img(idx)
path = ds.get_path(idx)
orig_keypoints = ds.get_kps(idx)
kptmp = orig_keypoints.copy()
c = ds.get_center(idx)
s = ds.get_scale(idx)
normalize = ds.get_normalized(idx)
# to crop
cropped = utils.img.crop(orig_img, c, s, (self.input_res, self.input_res))
for i in range(np.shape(orig_keypoints)[1]):
if orig_keypoints[0, i, 0] > 0:
orig_keypoints[0, i, :2] = utils.img.transform(orig_keypoints[0, i, :2], c, s,
(self.input_res, self.input_res))
keypoints = np.copy(orig_keypoints)
## augmentation -- to be done to cropped image
height, width = cropped.shape[0:2]
center = np.array((width / 2, height / 2))
scale = max(height, width) / 200
aug_rot = 0
aug_rot = (np.random.random() * 2 - 1) * 30.
aug_scale = np.random.random() * (1.25 - 0.75) + 0.75
scale *= aug_scale
mat_mask = utils.img.get_transform(center, scale, (self.output_res, self.output_res), aug_rot)[:2]
mat = utils.img.get_transform(center, scale, (self.input_res, self.input_res), aug_rot)[:2]
inp = cv2.warpAffine(cropped, mat, (self.input_res, self.input_res)).astype(np.float32) / 255
keypoints[:, :, 0:2] = utils.img.kpt_affine(keypoints[:, :, 0:2], mat_mask)
if 0 == np.random.randint(2):
inp = self.preprocess(inp)
inp = inp[:, ::-1]
keypoints = keypoints[:, ds.flipped_parts['mpii']]
keypoints[:, :, 0] = self.output_res - keypoints[:, :, 0]
orig_keypoints = orig_keypoints[:, ds.flipped_parts['mpii']]
orig_keypoints[:, :, 0] = self.input_res - orig_keypoints[:, :, 0]
## set keypoints to 0 when were not visible initially (so heatmap all 0s)
for i in range(np.shape(orig_keypoints)[1]):
if kptmp[0, i, 0] == 0 and kptmp[0, i, 1] == 0:
keypoints[0, i, 0] = 0
keypoints[0, i, 1] = 0
orig_keypoints[0, i, 0] = 0
orig_keypoints[0, i, 1] = 0
## generate heatmaps on outres
heatmaps = self.generateHeatmap(keypoints)
return inp.astype(np.float32), heatmaps.astype(np.float32)
def preprocess(self, data):
# random hue and saturation
data = cv2.cvtColor(data, cv2.COLOR_RGB2HSV)
delta = (np.random.random() * 2 - 1) * 0.2
data[:, :, 0] = np.mod(data[:, :, 0] + (delta * 360 + 360.), 360.)
delta_sature = np.random.random() + 0.5
data[:, :, 1] *= delta_sature
data[:, :, 1] = np.maximum(np.minimum(data[:, :, 1], 1), 0)
data = cv2.cvtColor(data, cv2.COLOR_HSV2RGB)
# adjust brightness
delta = (np.random.random() * 2 - 1) * 0.3
data += delta
# adjust contrast
mean = data.mean(axis=2, keepdims=True)
data = (data - mean) * (np.random.random() + 0.5) + mean
data = np.minimum(np.maximum(data, 0), 1)
return data
其中翻转比较反直觉
看这一张图,左边是原图,右手在上面,左手在下面
翻转之后,左手在上面,右手在下面,因此才会有keypoints[:, ds.flipped_parts[‘mpii’]](也就是交换左右关节)

img_aug, keypoint_aug = aug(image=img, keypoints=kps_array)
keypoint_aug = iaa.Resize({"width": 64, "height": 64})(keypoint_aug)
裁剪和数据增强(除去翻转和调整对比度)可以用下面这个代替
import imgaug as ia
import imgaug.augmenters as iaa
from imgaug.augmentables import KeypointsOnImage, Keypoint
aug = iaa.Sequential([
iaa.CropAndPad(px=(-left_y, -(w - right_x), -(h - right_y), -left_x), keep_size=False),
iaa.Resize({"width": 256, "height": 256}),
iaa.Affine(scale=(0.75, 1.25),
rotate=(-30, 30)),
iaa.WithColorspace(
to_colorspace="HSV",
from_colorspace="BGR",
children=[
iaa.WithChannels(0, iaa.Add(value=(-0.2 * 360, 0.2 * 360))),
iaa.WithChannels(1, iaa.Multiply(mul=(0.5, 1.5)))
]
),
iaa.AddToBrightness((-0.3, 0.3)),
# iaa.LinearContrast,
# iaa.Fliplr(),
])
img_aug, keypoint_aug = aug(image=img, keypoints=kps_array)
keypoint_aug = iaa.Resize({"width": 64, "height": 64})(keypoint_aug)
https://towardsdatascience.com/using-hourglass-networks-to-understand-human-poses-1e40e349fa15#:~:text=Hourglass%20networks%20are%20a%20type,image%20into%20a%20feature%20matrix.
https://medium.com/@monadsblog/stacked-hourglass-networks-14bee8c35678
相关文章
- 学习使用Lombok生成代码
- 《从零开始学Swift》学习笔记(Day 2)——使用Web网站编写Swift代码
- NET Core-学习笔记(二)
- 机器学习笔记 - win10安装Pytorch-GPU版本并训练第一个神经网络
- Mockito框架代码学习调试
- 深入学习 SAP UI5 框架代码系列之六:SAP UI5 控件数据绑定的实现原理
- Python语言学习:在python中,如何获取变量的本身字符串名字而非其值/内容及其应用(在代码中如何查找同值的所有变量名)
- 从Caffe开始深度学习实战,徒手hack代码乐趣更多
- ML与math:机器学习与高等数学基础概念、代码实现、案例应用之详细攻略——进阶篇
- Python编程语言学习:利用locals函数判断某个变量参数之前是否已经被定义/存在/出现
- 从零开始学习Java神经网络、自然语言处理和语音识别,附详解和简易版GPT,语音识别完整代码示例解析
- 基于最小二乘支持向量机(LS-SVM)进行分类、函数估计、时间序列预测和无监督学习(Matlab代码实现)
- 基于机器学习算法与历史数据预测未来的站点关闭(Matlab代码实现)
- 有监督学习神经网络的回归拟合——基于红外光谱的汽油辛烷值预测(Matlab代码实现)
- 【无人机】基于PSO-PA和Q-learning机器学习的无人驾驶飞行器 (UAV) 模拟器研究(matlab代码实现)
- 【监督学习】多层感知器MLP(含代码实现)
- 基于逐维反向学习的动态适应布谷鸟算法-附代码
- 基于变因子加权学习与邻代维度交叉策略的改进乌鸦算法 -附代码
- Vue学习之--------组件在Vue脚手架中的使用(代码实现)(2022/7/24)
- TPM零知识学习二—— 相关链接和页面
- python umap可视化学习
- markdown demo 学习
- 迁移学习算法之TrAdaBoost ——本质上是在用不同分布的训练数据,训练出一个分类器
- VB.net:VB.net编程语言学习之基于VS软件利用VB.net语言实现对SolidWorks进行二次开发的案例应用(启动SolidWorks代码/直接驱动模型代码/路径下模型驱动代码/创建两个文
- 【学习经验分享NO.20】代码报错(可帮助远程调试代码)