
自动控制原理(六)
控制系统的校正
概述
校正:
在系统中加入一些机构和装置(其参数可以根据需要而改变),使系统特性发生变化,从而满足给定的各项性能指标。
性能指标:
评价系统性能优劣的一些数据。
时域指标
频域指标
常用的校正方式:
串联校正:串联校正比反馈校正更易于实现对信
号进行各种必要形式的变换。
反馈校正:反馈校正可以消除系统不可变部分中为反馈所包围那部分的参数波动对系统控制性能的影响。
前置校正、干扰补偿校正
校正方法: 综合法(希望特性法)、分析法(试探法)
校正装置及其特性
无源校正装置
超前网络

超前网络的传函:

为了补偿超前网络造成的衰减,需串接一放大器。补偿后:

超前网络
1
+
a
T
s
1
+
T
s
{1+aTs} \over {1+Ts}
1+Ts1+aTs的伯德图:

ω
m
=
1
T
a
\omega_m={1 \over {T\sqrt{a}}}
ωm=Ta1
当
ω
=
ω
m
\omega=\omega_m
ω=ωm时,
φ
m
=
t
g
−
1
[
a
−
1
2
a
]
=
s
i
n
−
1
[
a
−
1
a
+
1
]
\varphi_m=tg^{-1}[{{a-1} \over 2\sqrt{a}}]=sin^{-1}[{{a-1}\over{a+1}}]
φm=tg−1[2aa−1]=sin−1[a+1a−1]
在
ω
m
\omega_m
ωm处的对数幅值:

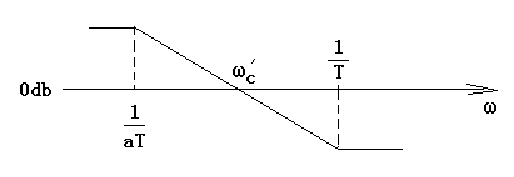
滞后网络

滞后校正的传递函数:

作用: 采用滞后网络校正,主要是利用其高频幅值衰减的特性,应力求避免最大滞后角发生在校正后系统的开环截止频率附近。
滞后网络的伯德图:

滞后-超前网络

网络的传函:

滞后-超前网络的零、极点分布:

滞后-超前网络的伯德图:

有源校正装置
应用场合:系统的调整要求比较高,并希望校正装置的参数可以任意调整。

u
0
u
i
=
−
Z
2
Z
1
{u_0 \over u_i}=-{Z_2 \over Z_1}
uiu0=−Z1Z2
PD调节器(比例-微分调节器)
传递函数:

作用等同于超前校正。
PI调节器(比例-积分调节器)
传递函数:
作用等同于滞后校正。
PID调节器(比例-微分-积分调节器)
传递函数:

PID调节器的时域表达式:

串联校正及其参数确定
超前校正
串联超前校正的原理:
利用超前网络的相角超前特性。
要点:
-
正确地将超前网络的转折频率 1 a T 1 \over{aT} aT1和 1 T 1\over T T1选在待校正系统剪切频率的两边。
-
闭环系统的稳态性能可由选择开环增益来保证。
设计步骤:
3. 根据稳态误差要求,确定开环增益K。
4. 利用已确定的开环增益K,计算未校正系统的相角裕度。
5. 根据希望剪切频率
ω
c
\omega_c
ωc计算超前网络参数a和T
(选择最大超前角频率
ω
m
=
ω
c
\omega_m=\omega_c
ωm=ωc以保证
t
s
t_s
ts减小)

6. 验算已校正系统的相角裕度

7. 确定超前网络的元件值,并注意计算结果的标称化
作用:
(1)可以提高系统的相对稳定性
(2)可以加快系统的响应速度
注意事项:
应用超前校正时,必须指出适用范围
(1)原系统不稳定,a必须较大,使闭环带宽要求过大,抗干扰能力下降
(2)在剪切频率附近相角迅速减小的未校正系统不宜采用串联超前校正
滞后校正
基本原理:
利用滞后网络的高频幅值衰减特性,使剪切频率下降,从而获得足够的相位裕度。
注意:滞后网络的最大滞后角应避免发生在系统剪切频率附近。
适用于:响应速度要求不高,而稳态性能、抗干扰能力要求较高时。
串联超前校正与串联滞后校正的区别
- 超前校正是利用超前网络的相角超前特性,而滞后校正是利用滞后网络的高频幅值衰减特性
- 为了满足严格的稳态性能要求,在采用无源校正网络时,超前校正要求一定的附加增益,而滞后校正不需要
- 对于同一系统,采用超前校正的系统带宽大于采用滞后校正系统的带宽
滞后-超前校正
略
反馈校正
适用于:
(1)控制系统随工作条件改变,其中一些参数
可能变动的幅度较大;
(2)在该系统中能取出适当的反馈信号。
反馈校正的原理:

G
2
c
=
G
2
1
+
G
2
G
c
G_{2c}={G_2 \over {1+G_2G_c}}
G2c=1+G2GcG2
特点:
- 能抑制被包围部分 G2内部参数变化
- 抑制外部作用于G2上的干扰影响
- 若内环稳定,在 ∣ G 2 G c ( j ω ) ∣ > > 1 |G_2G_c(j\omega)|>>1 ∣G2Gc(jω)∣>>1的频带内, G 2 G c ( j ω ) ≈ 1 G c ( j ω ) G_2G_c(j\omega)\approx{1 \over {G_c(j\omega)}} G2Gc(jω)≈Gc(jω)1
用频率法设计反馈校正装置时:

反馈校正及其参数确定:
(1) 先根据稳态性能要求确定系统的开环增益K,并绘制无反馈校正时系统的开环对数幅频特性;
(2) 按要求的性能指标绘制希望的开环对数幅频特性;
(3) 确定内反馈回路的开环对数幅频特性;
(4)求出反馈校正环节的传递函数。
总结:
应用局部反馈校正,可使系统具有希望的特性,满足规定的性能指标;而且若与串联校正相配合,增加校正时的自由度(即可以自由选择的变量数),则用简单的校正装置可以获得满意的结果。(增加自由度,系统质量得到提高,与此同时,系统的复杂性自然也提高了。)