
【多传感器融合】匈牙利算法
匈牙利匹配算法
匈牙利算法是由匈牙利数学家Edmonds于1965年提出,因而得名。匈牙利算法是基于Hall定理中充分性证明的思想,它是部图匹配最常见的算法,该算法的核心就是寻找增广路径,它是一种用增广路径求二分图最大匹配的算法。
匈牙利算法(Hungarian Algorithm)采用了二分图法的思想,具体来说,Hungarian Algorithm 是一个递归过程,尽可能找到让上一帧与当前帧目标一对一的匹配。该算法对红线连接的准确率要求很高,也就是对运动模型和表观模型要求较高,需要将置信度较高的对象匈牙利算法进行匹配,才能得到比较好的结果。
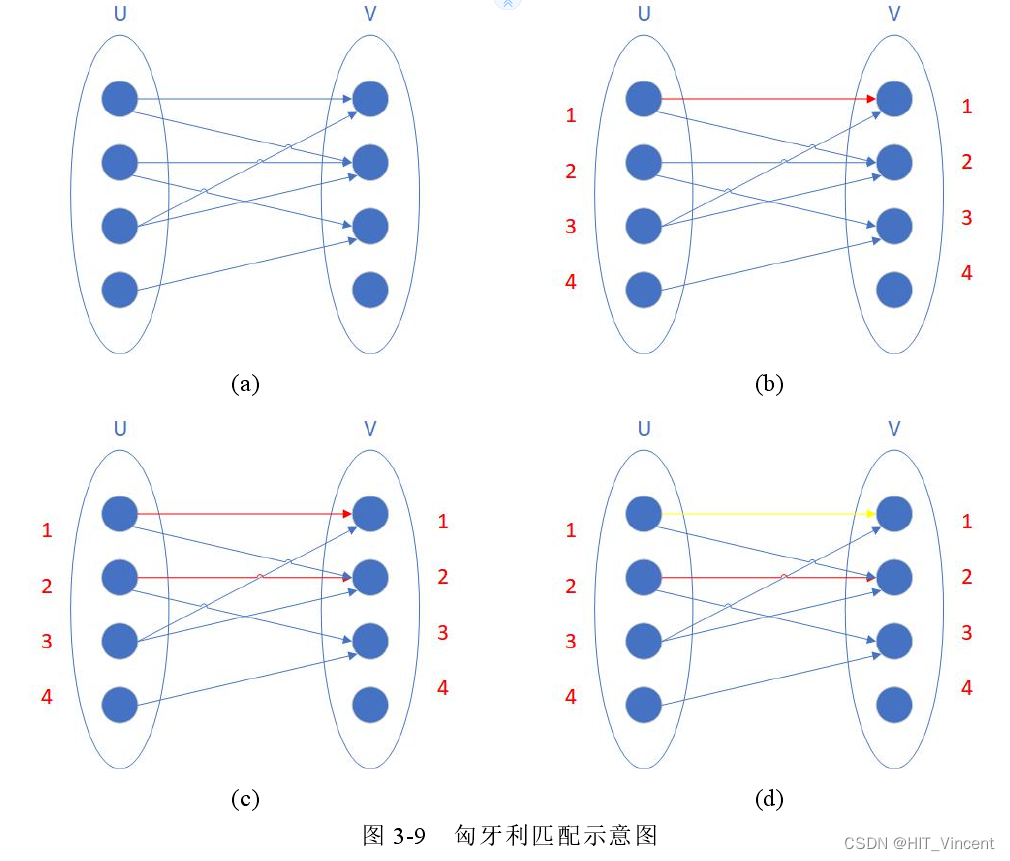
(1)初始化二分图 即将当前帧中可能与上一帧中目标匹配的检测框确认,如图 3-9(a);
(2)按照 ID 顺序依次进行匹配 首先将可能与上一帧目标 1 相匹配的当前帧的目标 1 进行匹配(红色代表已经匹配)。如图 3-9(b);
(3)对目标 2 进行匹配 如图 3-9(c);
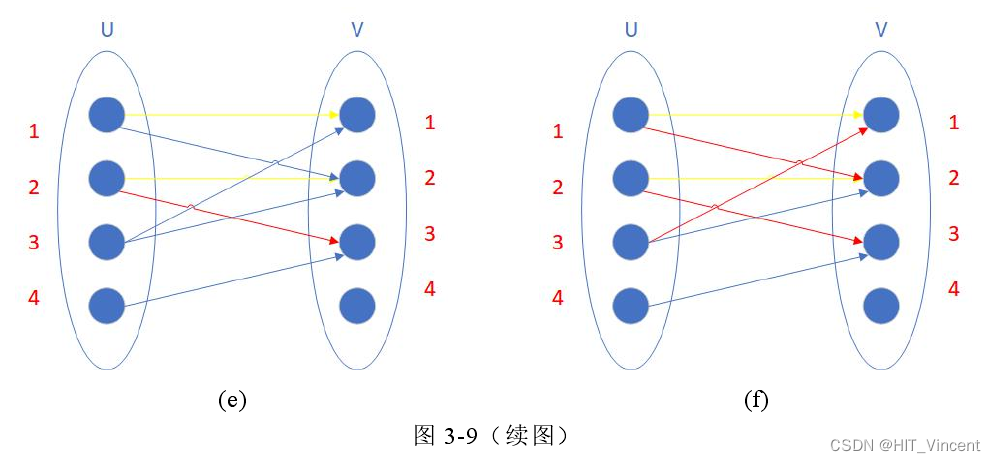
(4)对目标 3 进行匹配 这时发现当前帧中可以与目标 3 进行匹配的目标 1,2 已经被匹配过了,为了使目标 3 可以匹配到目标,尝试将之前 U 中匹配到目标 1 的目标与另一个目标匹配(黄色代表取消匹配),如图 3-9(d),这时发现 U 中的目标 1 可以匹配到的 V 中的目标 2 也已经被 U 中的目标 2 匹配到了,那么同理,在将 U 中的目标 2 更换匹配目标,如图 3-9(e),这时再返回上一步,即可将 U 中的目标 1,2,3 均匹配到目标,如图 3-9(f);
(5)对目标 4 进行匹配 与上述步骤相同,但是最后并没有找到能够符合要求的匹配方法,所以 U 中的目标 4 在这一帧中消失,同时当前帧中的目标4 被视为新出现的目标。
bool find(int x){
int j;
for (j=1;j<=m;j++){
if (line[x][j]==true && used[j]==false){
used[j]=1;
if (girl[j]==0 || find(girl[j])){
girl[j]=x;
return true;
}
}
}
return false;
}
//下面是主程序
for (i=1;i<=n;i++)
{
memset(used,0,sizeof(used)); //这个在每一步中清空
if find(i) all+=1;
}
-
自动驾驶结合
在自动驾驶中,不同传感器每一个周期返回不同的目标,相互之间如何匹配呢,对于同一个传感器而言,一般都有不同目标对应的ID,但是在夸传感器之间就没有这么幸运的事,另外融合了所有传感器的目标之后我们自己的输出,也需要目标和目标之间的配准,这中间都可以应用匈牙利匹配的方法实现。
之前的文章中有介绍多目标的融合方法:传感器数据融合,当时只是把融合的方法进行分类,并没有介绍一种行之有效的操作手册,那这里我来阐述一下我的一个思路:
我们有一个目标模型:,其中 u 和 v 分别代表目标中心的水平和垂直像素位置,而 s 和 r 分别代表目标边界框的比例(面积)和纵横比,这里是和一个固定尺度进行比较,一般选最大的区间,使得归一化到统一的模型中。后面的是通过kalman滤波进行跟踪之后的结果。
采用匈牙利匹配对这些目标进行匹配,这中间不同目标之间的好感度,我们采用预测边界框之间的交并比(IoU)来计算,当然我们也不会一位的进行配对,需要设计最小交并比(IoU),也就是说交并比太小我们没有必要强行匹配。
文章发现边界框的 IoU 距离隐式处理由目标经过引起的短时遮挡。具体地说,当遮挡物盖过目标时,只检测到遮挡物。尽管隐藏目标离检测框中心更近,但 IoU 距离更倾向于具有相似比例的检测。这使得可以在不影响覆盖目标的情况下,通过检测对遮挡目标进行校正。
当目标进入和离开图像时,需要相应地创建或销毁唯一标识。对于创建跟踪程序,文中认为任何重叠小于 IoUmin 的检测都表示存在未跟踪的目标。使用速度设置为零的边界框信息初始化跟踪器。由于此时无法观测到速度,因此速度分量的协方差用较大的值初始化,反映出这种不确定性。此外,新的跟踪器将经历一个试用期,其中目标需要与检测相关联以积累足够的证据以防止误报的跟踪。
最后的最后,我们对于一个对象的建立和销毁,需要加入延时判断,这样才不会让我们的目标来回跳动,增加目标融合的稳定性。
参考文献
https://blog.csdn.net/zhouyy858/article/details/103830741
https://blog.csdn.net/dark_scope/article/details/8880547
相关文章
- (转)CentOS 7安装TCP BBR拥塞算法
- 时域分析瞬时自相关算法、频域分析复倒频分析法、调制域分析过零检测算法以及时频分析小波换算法matlab仿真
- 【SIFT,FPGA】基于FPGA的图片sift算法,图像的配准融合在上位机上实现
- 【IHS+稀疏表示】基于IHS小波变换和稀疏表示相结合的遥感图像融合算法matlab仿真
- 基于EM算法的图像融合算法,对图像不用进行多尺度分解
- 10大排序算法之一:选择排序【不稳定】,一般不用选择排序的
- 双线性内插法进行图像旋转算法的C代码实现
- C#,图论与图算法,任意一对节点之间最短距离的弗洛伊德·沃肖尔(Floyd Warshall)算法与源程序
- C#,图片分层(Layer Bitmap)绘制,反色、高斯模糊及凹凸贴图等处理的高速算法与源程序
- Fabonacci算法
- 数据结构与算法面试题(2022最新版)
- JVM GC和常见垃圾回收算法
- 激光雷达、摄像头、毫米波雷达多传感器融合及融合动态分配(DWD)算法编译运行
- 麦克风阵列技术-beaforming开源算法源码分析
- EM算法
- 基于C++实现磁盘调度算法【100010767】
- 华为OD机试 - 字母计数(JavaScript) | 机试题+算法思路+考点+代码解析 【2023】
- 归并排序算法
- 前端排序算法 - 希尔排序算法 (6)