
图像分割 - 阈值处理 - 全局阈值处理
处理 图像 分割 全局 阈值
2023-09-11 14:15:38 时间
目录
1. 介绍
当目标和背景像素的灰度分布非常不同的时候,可以对整个图像使用全局阈值
在大多数的应用中,图像之间通常存在足够的变化,全局阈值是一种合适的办法。所以,需要一种对图像做阈值估计的算法。为了获取合适的阈值,可以利用直方图进行迭代计算:
算法步骤如下:
- 随机设置一个阈值的初始值 T
- 用 T 分割图像,这将会产生两个像素区域。一个是灰度值 <= T 所有像素组成的子区域 G1,一个是灰度值 >T 所有像素组成的子区域 G2
- 对G1、G2 两个子区域分别计算平均灰度值m1、m2
- 利用m1、m2得到新的阈值:T = (m1 + m2)/ 2
- 重复2-4,直到两个阈值T的差值小于某个预设定的值ΔT为止
当目标和背景之间存在一个非常清晰的波谷的时候,上述的算法很有效,
一般来说,初始的阈值T设定为整幅图像的平均灰度值
2. 代码实现
完整代码:
import cv2
import numpy as np
def global_threshold_processing(x): # x 为传入的图像
hist = cv2.calcHist([x], [0], None, [256], [0, 256]) # 图像的灰度直方图 shape = (256,1)
grayScale = np.arange(256).reshape(1, -1) # 灰度级 [0,255] shape =(1,256)
sum_pixels = x.shape[0] * x.shape[1] # 图像总共像素点的个数
sum_gray = np.dot(grayScale, hist) # 每个灰度值像素的个数 * 对应灰度值 = 所有的像素灰度值的和
T = np.around(sum_gray / sum_pixels).astype(np.uint).item() # 初始阈值T,设定为整幅图像的平均灰度值
theta = 1
while True: # 迭代算法
gray_c1 = grayScale[:, :T + 1] # 灰度值 <= T 的子区域 G1 的灰度级 (0,T)
hist_c1 = hist[:T + 1, :] # 子区域G1 的直方图 (0,T),对应每个灰度值的像素点
sum_gray_G1 = np.dot(gray_c1, hist_c1) # G1 区域所有像素点灰度值总和 = (0,T)的灰度值 * 对应像素点的个数
sum_pixels_G1 = np.sum(hist_c1) # G1 区域所有像素点的个数
m1 = sum_gray_G1 / sum_pixels_G1 # G1 区域平均灰度值
sum_pixels_G2 = sum_pixels - sum_pixels_G1 # G2 区域所有像素点的个数 : 所有像素点 - G1 区域像素点个数
sum_gray_G2 = sum_gray - sum_gray_G1 # G2 区域所有像素点的灰度值总和 :所有灰度值 - G1 灰度值
m2 = sum_gray_G2 / sum_pixels_G2 # G2 区域平均灰度值
T_new = np.around((m1 + m2) / 2).astype(np.uint).item() # 计算新的阈值
if abs(T - T_new) < theta:
T = T_new
break
else:
T = T_new
x[x >= T] = 255 # 阈值处理
x[x < T] = 0
return T,x
img = cv2.imread("img.png",0)
ret,dst = global_threshold_processing(img.copy())
print(ret)
cv2.imshow('img',np.hstack((img,dst)))
cv2.waitKey(0)
cv2.destroyAllWindows()
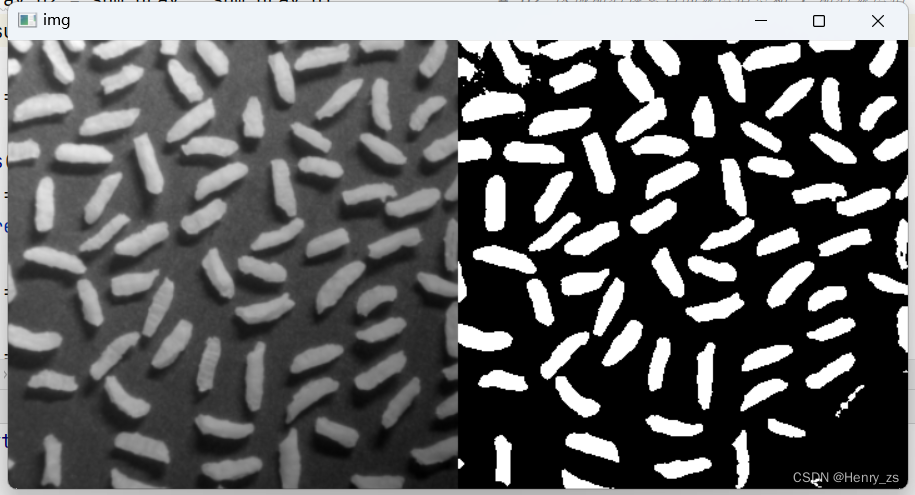
图像处理结果:返回的阈值T = 113
图像处理结果:返回的阈值T = 129
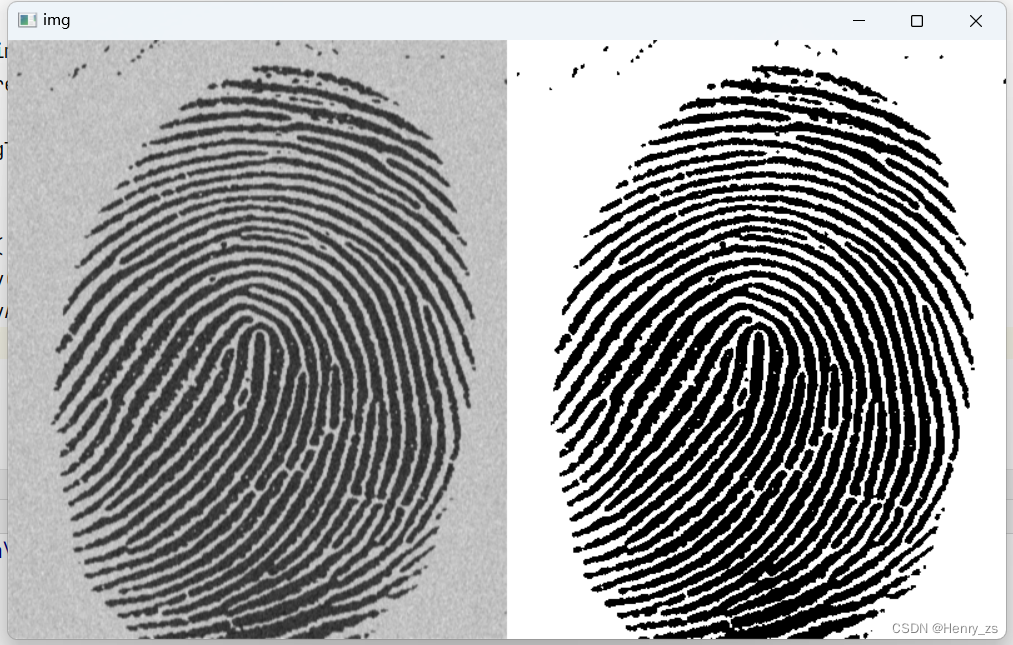
和书上不一样的原因是因为,这里为了显示做了缩放,里面的插值方式会影响图像的灰度值
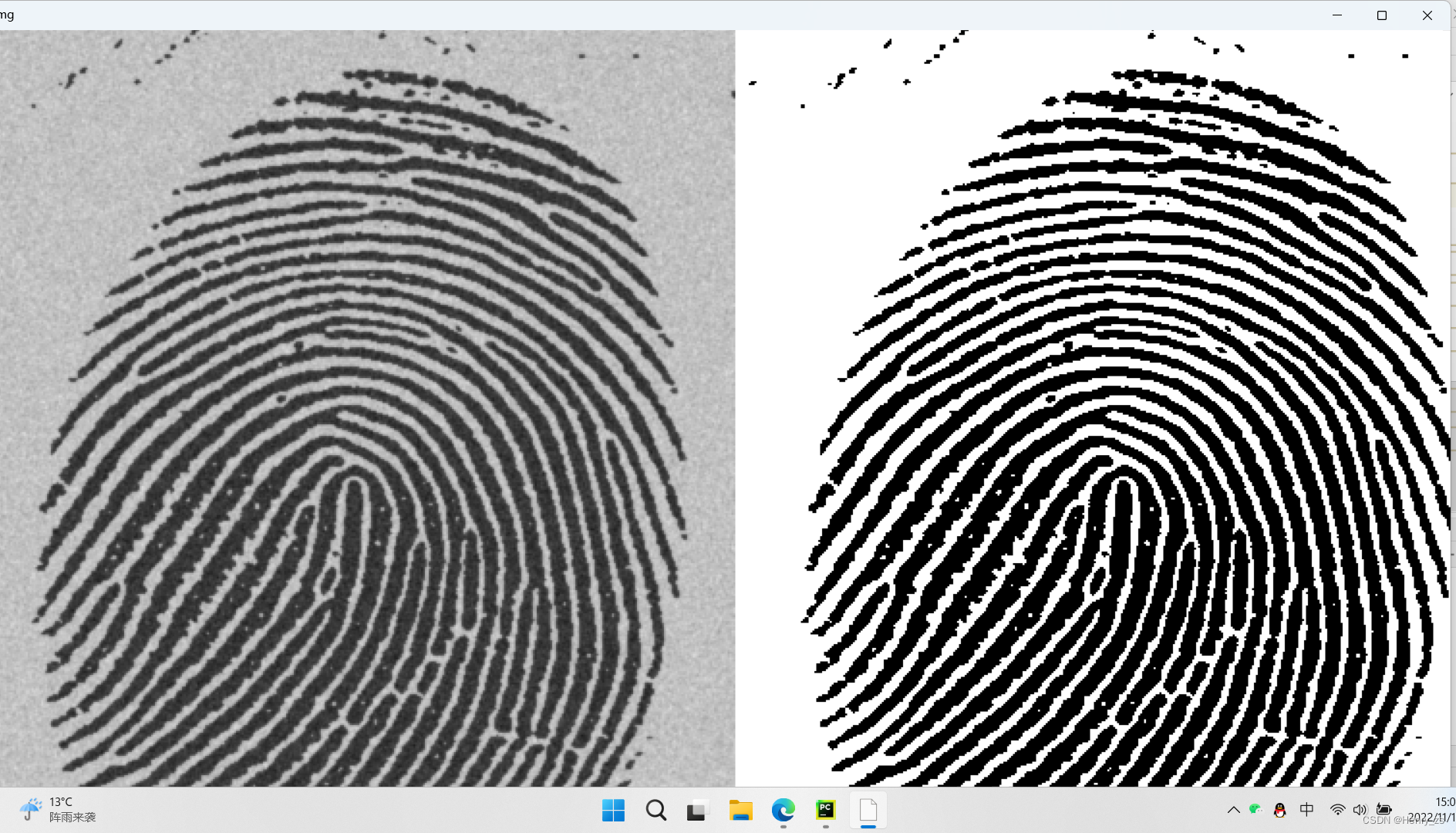
如果不做缩放会是这样:T = 125
3. 代码讲解
算法实现的步骤已经给了注释,这里做简单的讲解
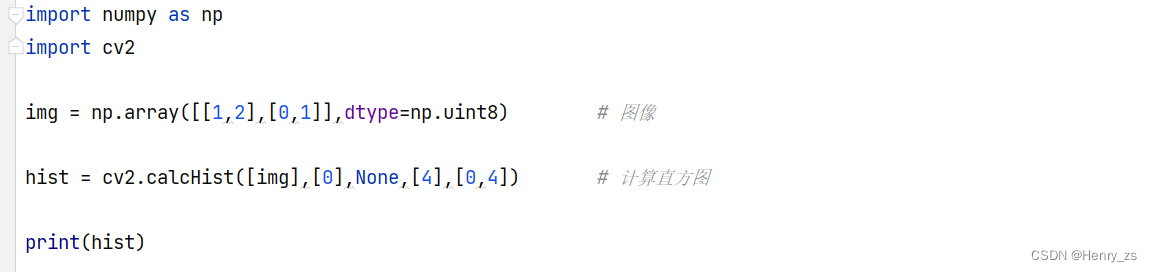
opencv中的计算直方图,会返回一个(256,1)的矩阵,256是灰度级。因此返回值是256行,1列的矩阵。里面的索引是0-255,对应256和灰度值,每个索引上面的值是像素点的个数

因此将hist和256个灰度值相乘就是总像素灰度值的和,这里是sum_gray

然后,np.around 是np数组的四舍五入

相关文章
- [Android] 图像各种处理系列文章合集
- [Android] 使用Matrix矩阵类对图像进行缩放、旋转、对比度、亮度处理
- 【数字图像处理】图像细化处理
- [Remoting]当client不复存在而RemoteObject并不知道时的处理办法
- 处理表单数据
- opencv中图像伪彩色处理(C++ / Python)
- Python 图像处理 OpenCV (2):像素处理与 Numpy 操作以及 Matplotlib 显示图像
- 数字图像处理 图像形态学处理 孔洞填充
- Atitit 大数据体系树 艾提拉著 数据采集 gui自动化 爬虫 Nui自动化 Ocr技术 Tts语音处理 文档处理(office zip等) html文档处理解析 转换与处理
- Atitit.java图片图像处理attilax总结 BufferedImage extends java.awt.Image获取图像像素点image.getRGB(i, lineIndex); 图片剪辑/AtiPlatf_cms/src/com/attilax/img/imgx.javacutImage图片处理titit 判断判断一张图片是否包含另一张小图片 atitit 图片去噪算法的原理与
- 如何处理TCPSocket客户端与服务器端连接中断后的异常
- 线程异常:undefined reference to 'pthread_create' 处理
- Qt 处理相机图像实时显示引入队列,防止数据读写冲突导致卡顿、崩溃
- Python图像处理丨带你认识图像量化处理及局部马赛克特效
- 树模型对类别变量的 7 种处理方法(Python代码)
- 习题 10.6 请编写程序,处理一个复数与一个double数相加的运算,结果存放在一个double型的变量d1中,输出d1的值,再以复数形式输出此值。定义Complex(复数)类,在成员函数中包含。。
- Python编程:pillow处理图像生成验证码图片
- 学会处理对一个事件源有多个事件的监听器
- matlab图像模糊处理
- 【pandas】教程:9-如何轻松处理时间序列数据
- 学习经验分享之十二:HRSC-2016遥感图像舰船数据集处理(内含获取方式)
- ansible的error处理机制