
动态系统的建模与分析
2023-09-14 09:16:22 时间
动态系统的建模与分析
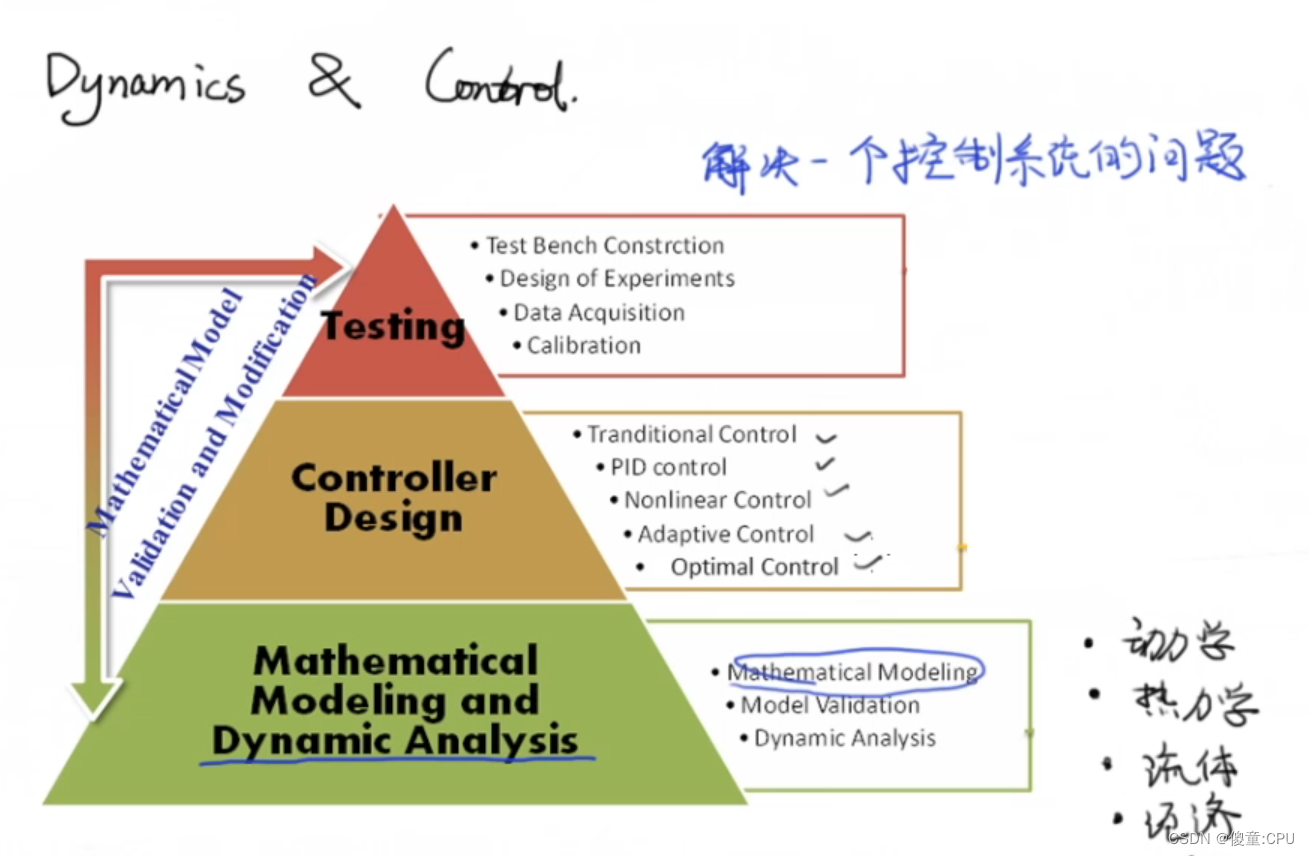
分析被控对象的物理特性及动态表现,在这个基础上建立数学模型,数学模型可以是动力学模型、热力学模型、流体力学模型和经济学模型等,然后在数学模型的基础上进行控制器的设计,为满足不同的要求就要应用不同的控制方法(传统控制控制、PID控制、非线性控制、自适应控制和优化控制等),紧接着选择测试平台,可以是仿真平台、实验室模型样机和真实设备等。最后不断将实验结果与模型比较,对数学模型不断的验证和更新。
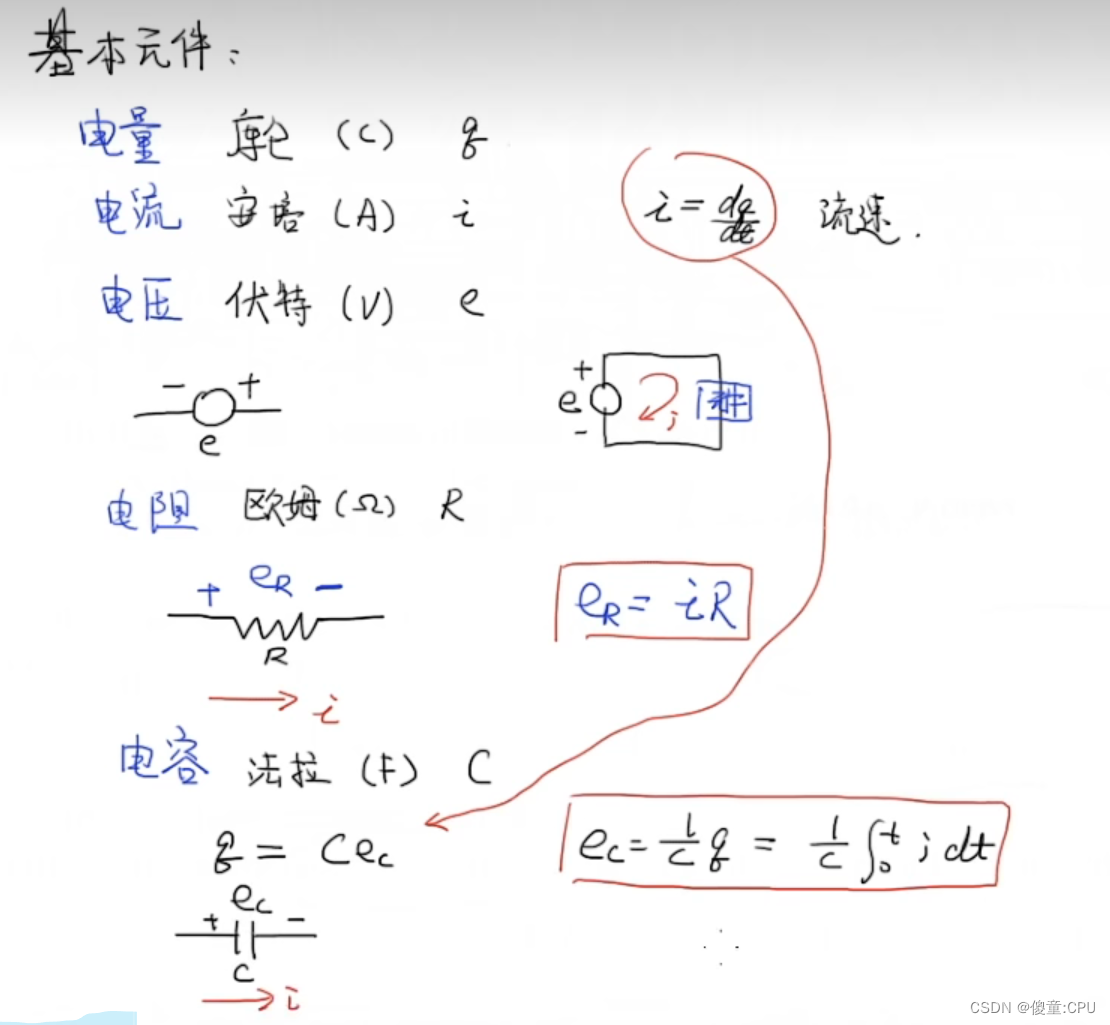
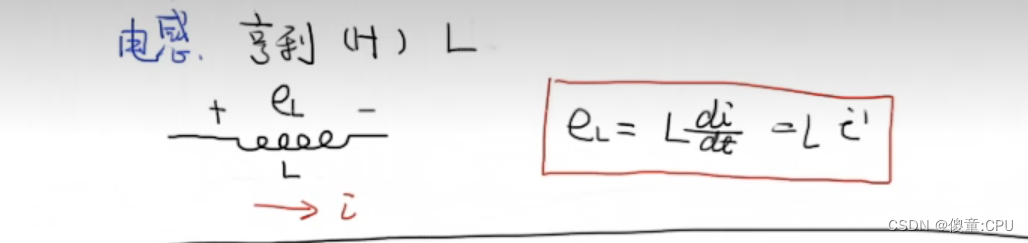
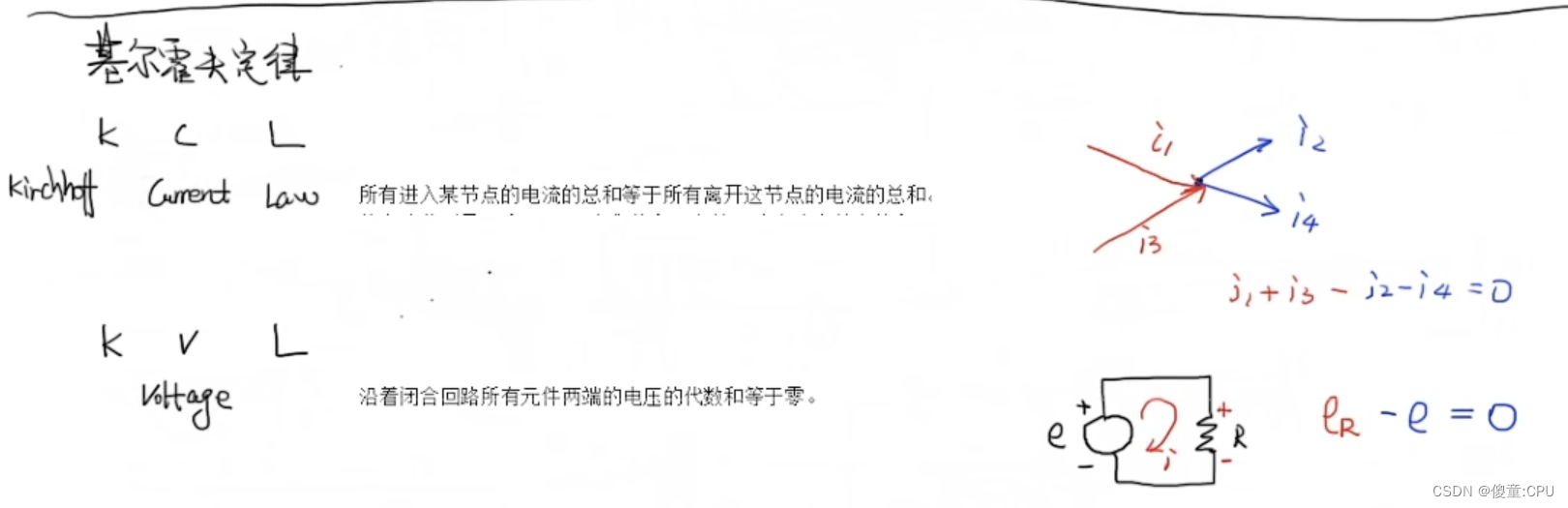
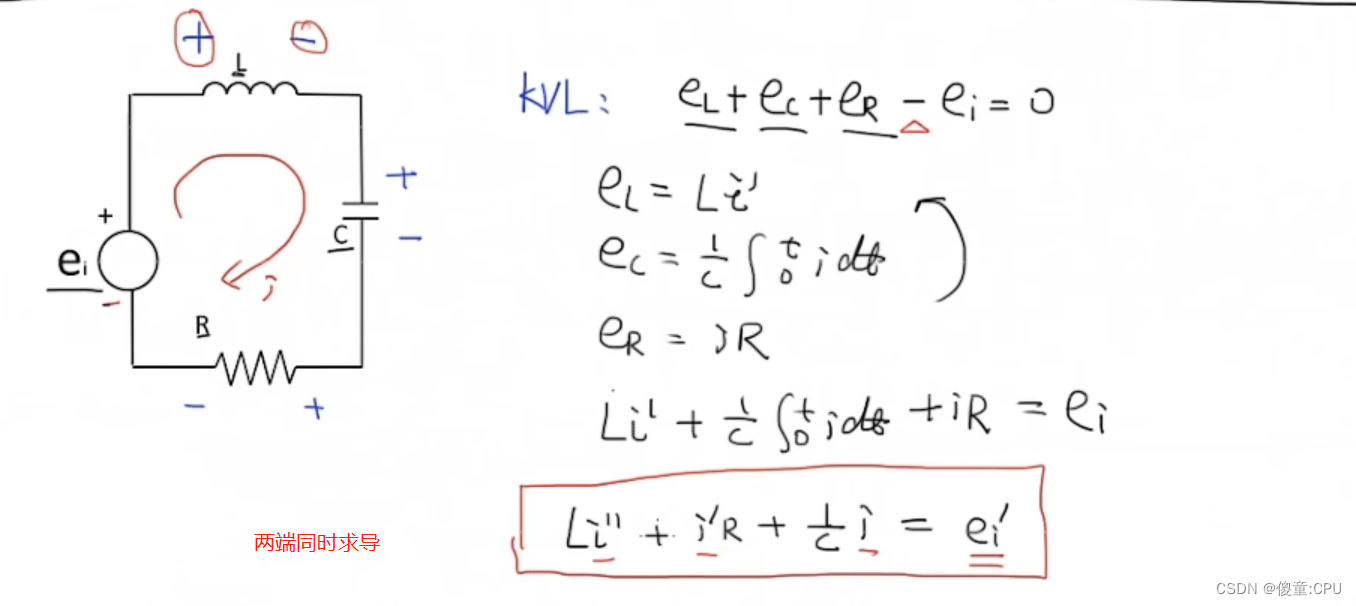
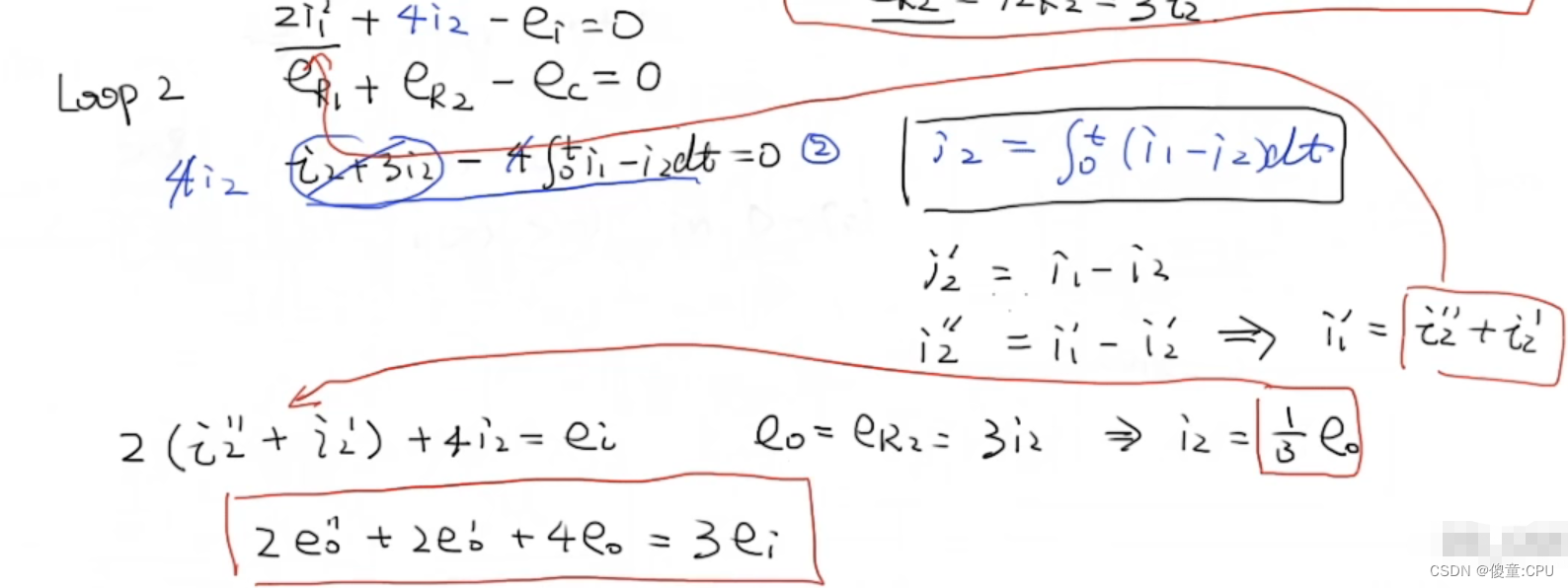
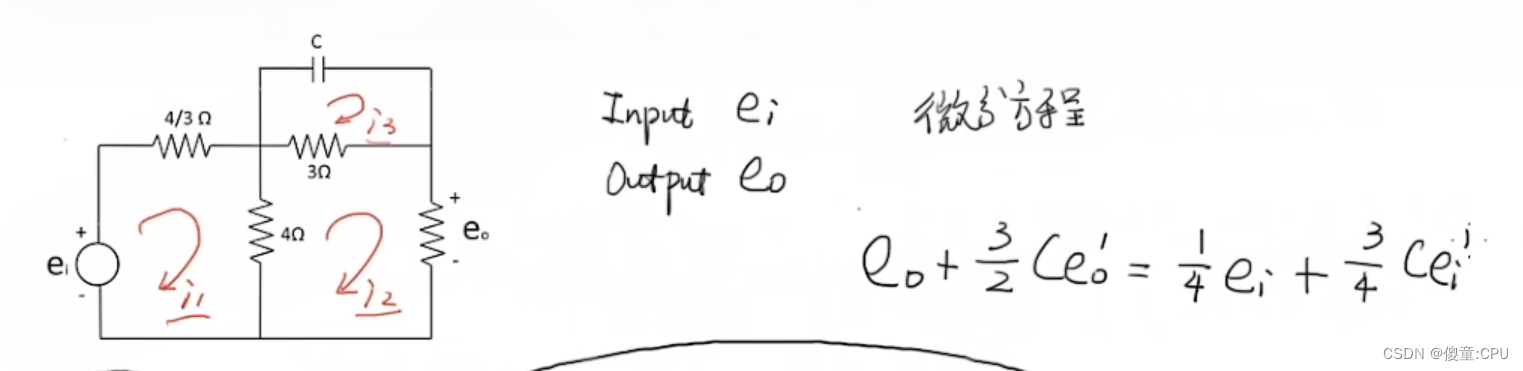
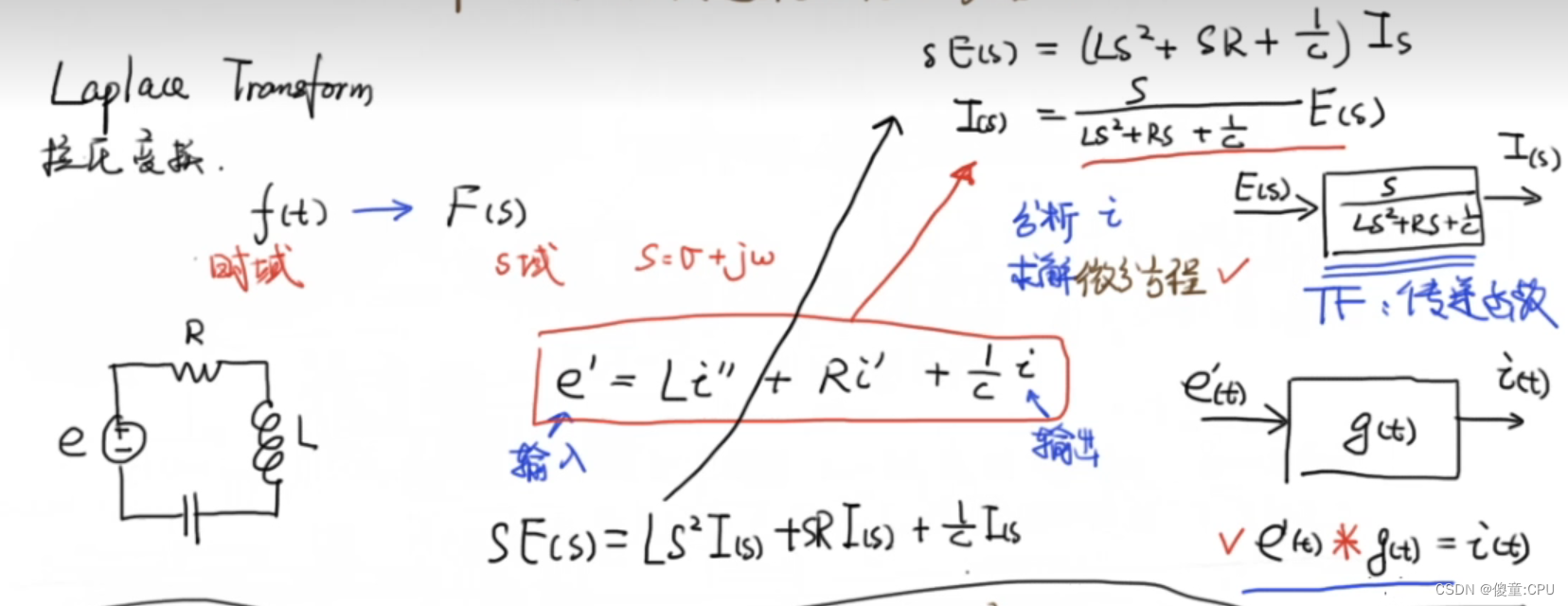
电路系统建模-基尔霍夫定律
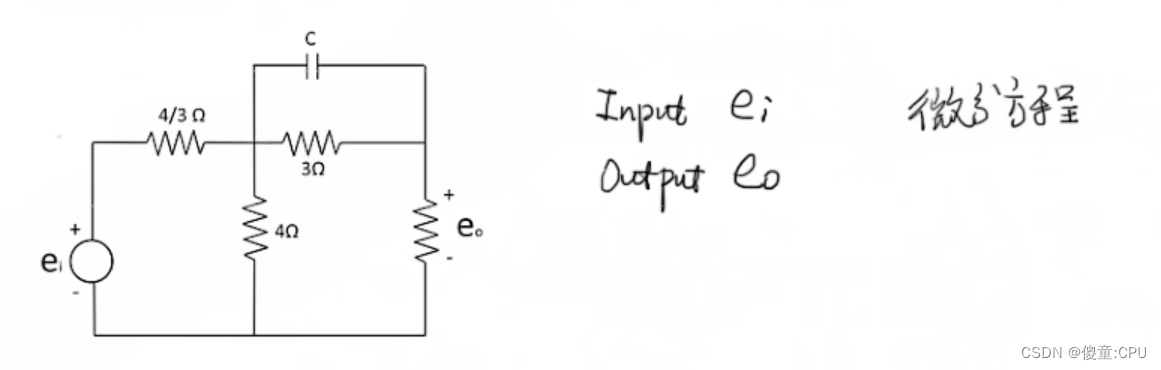
例子
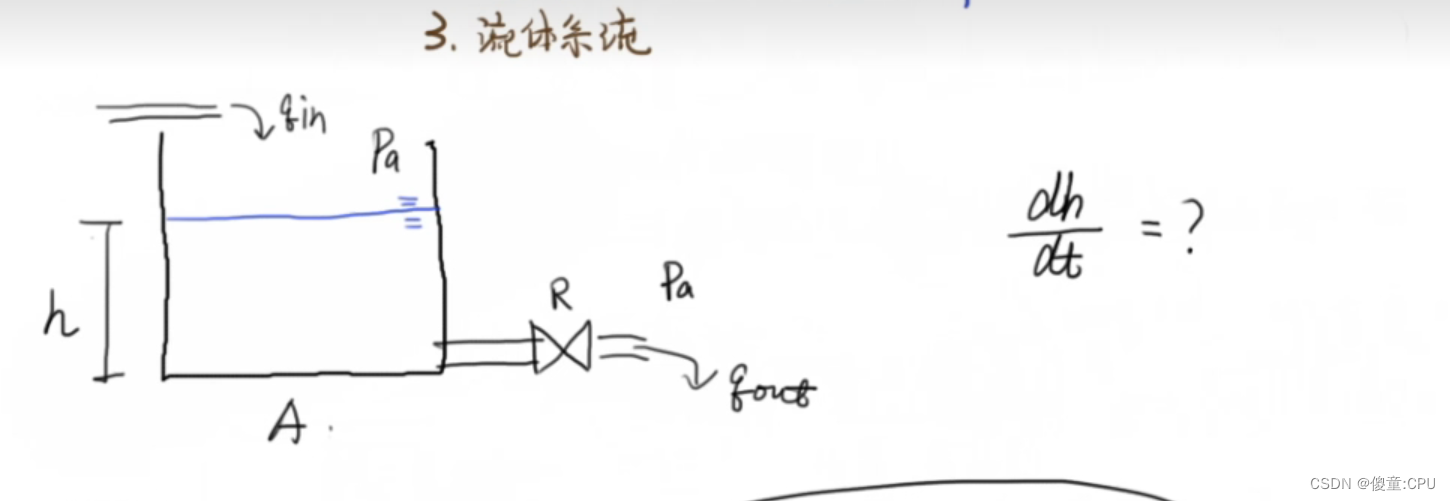
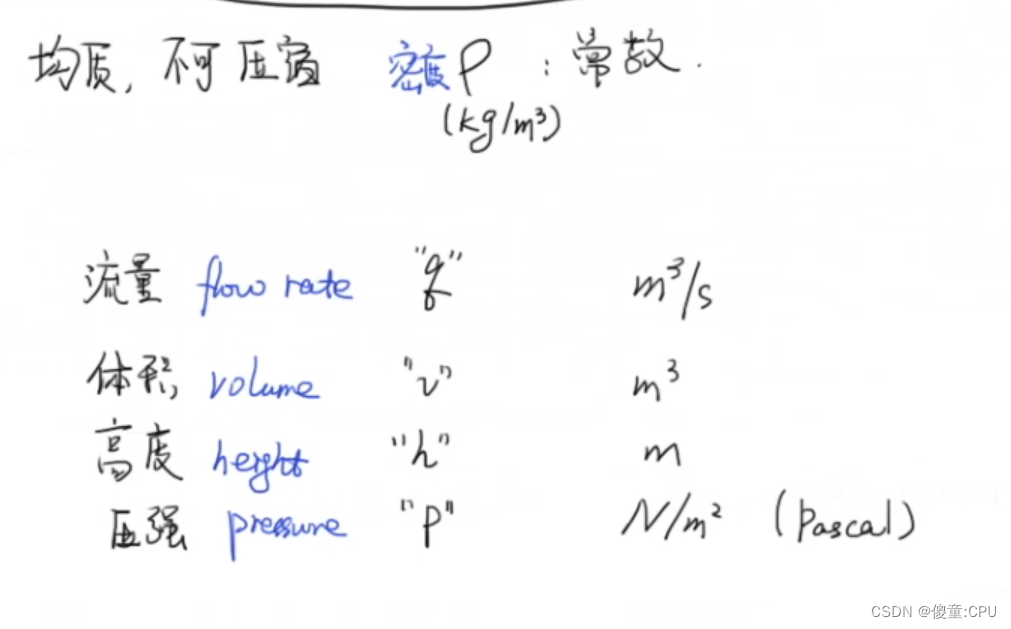
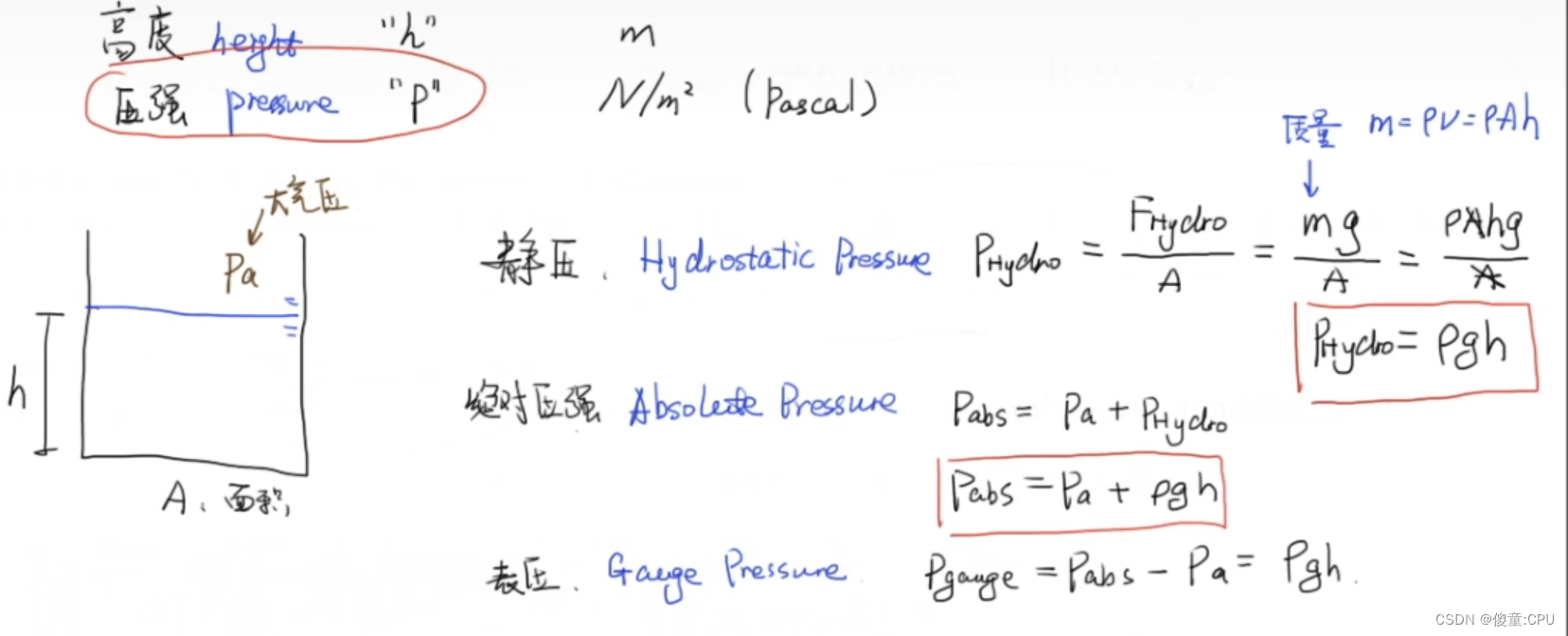
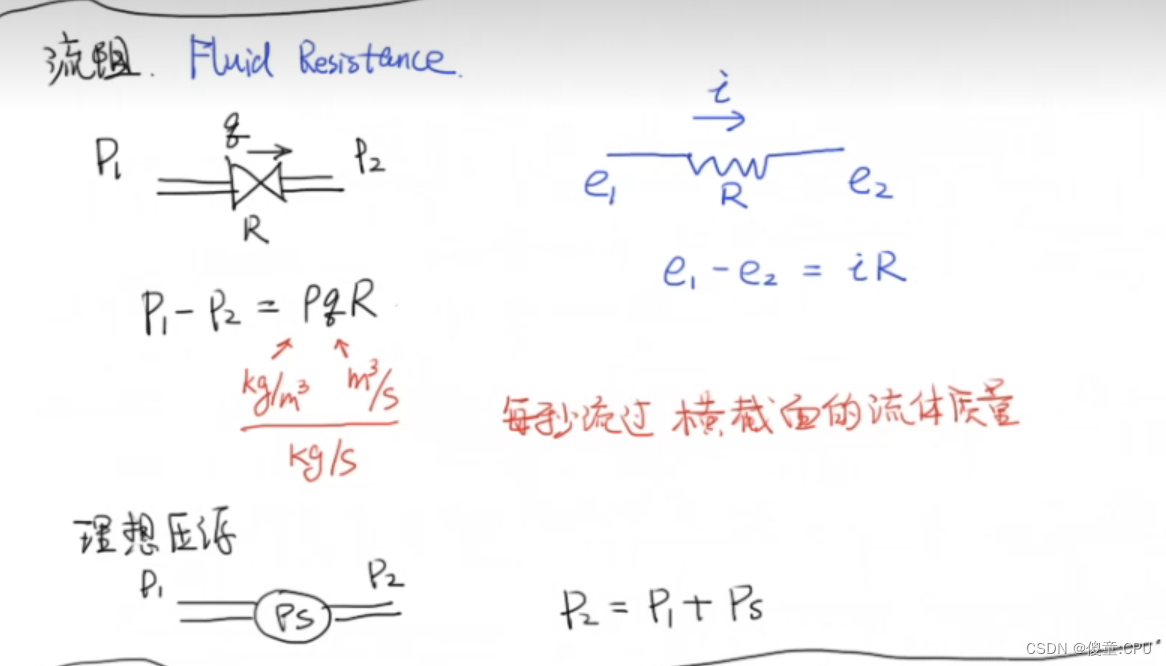
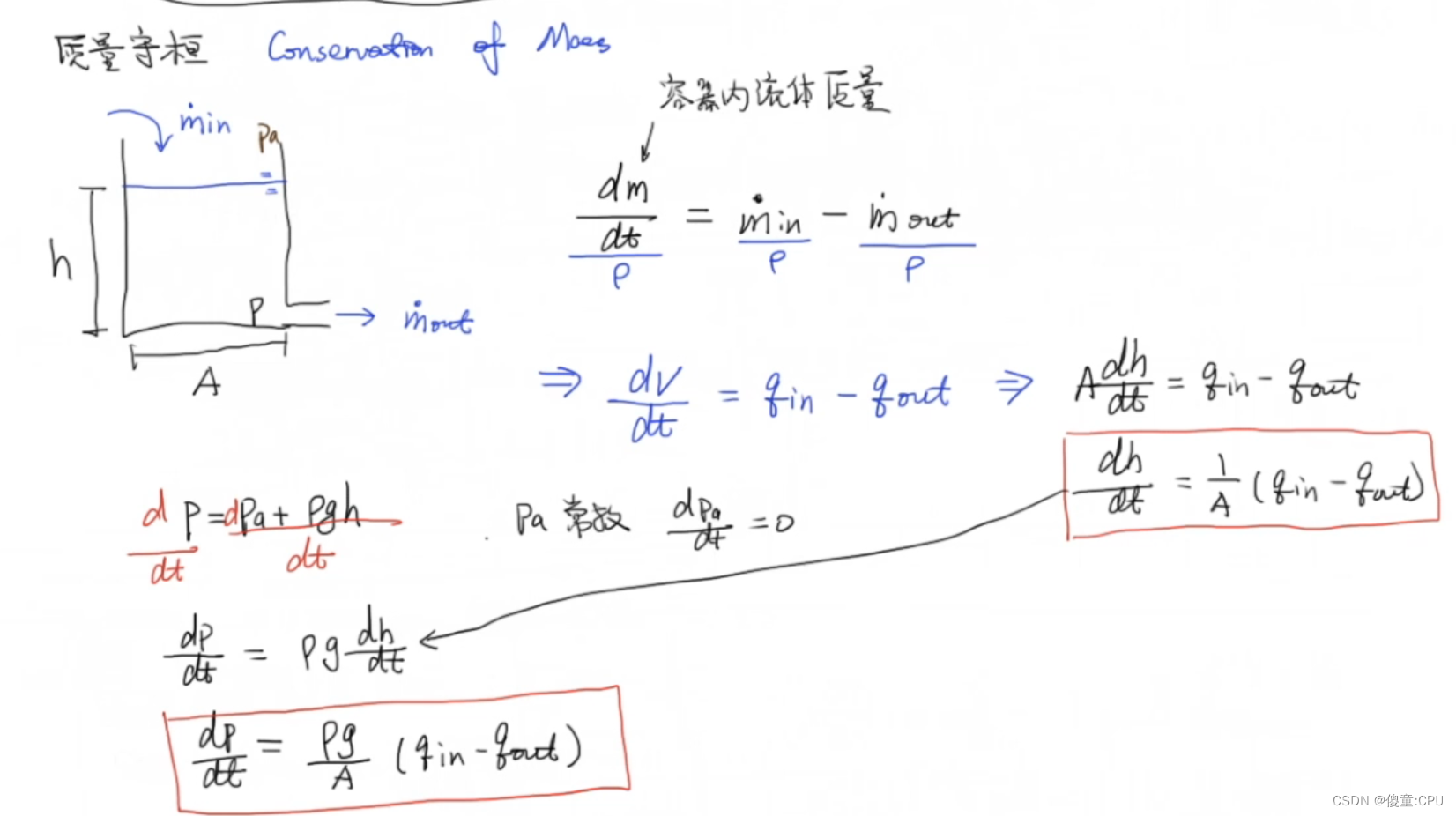
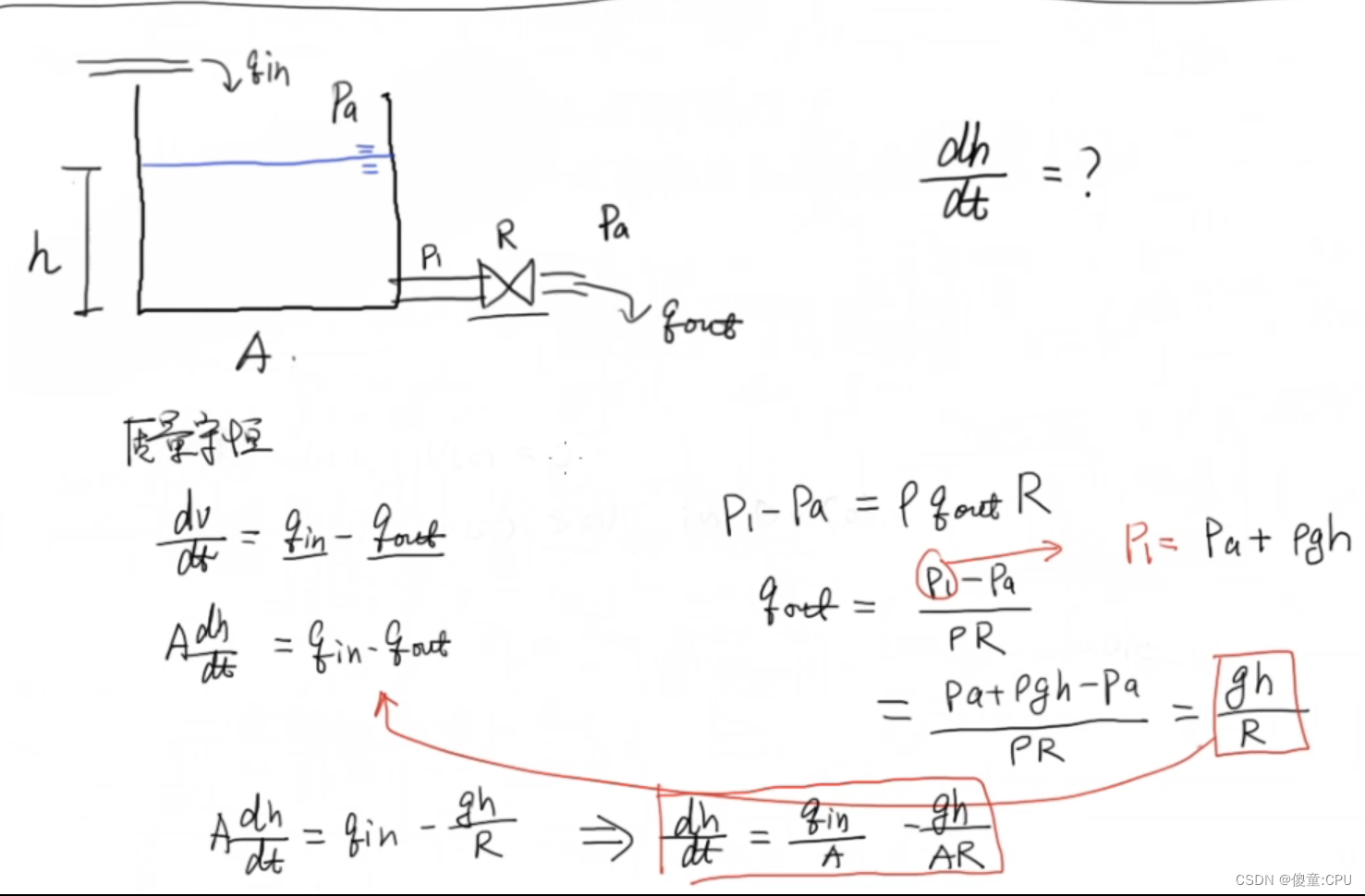
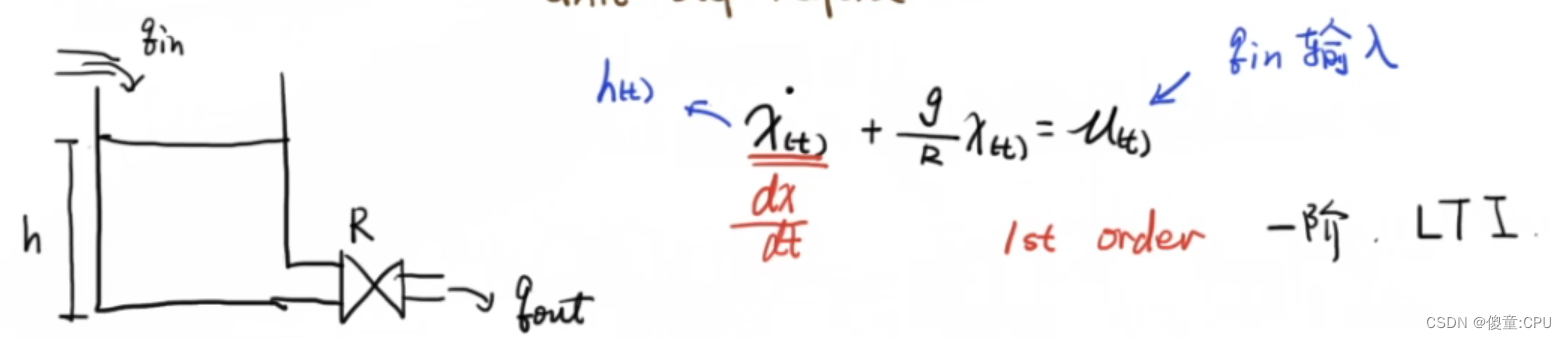
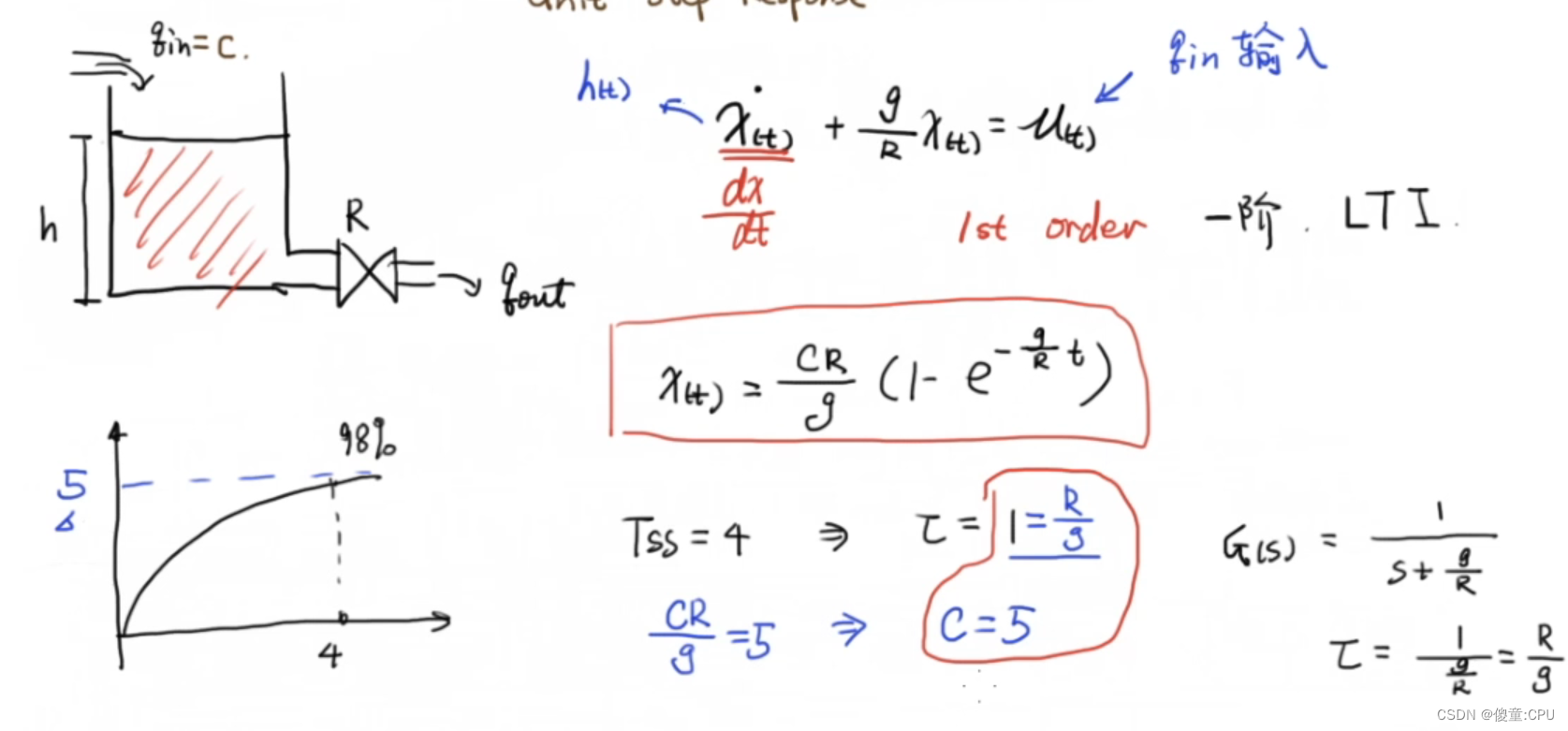
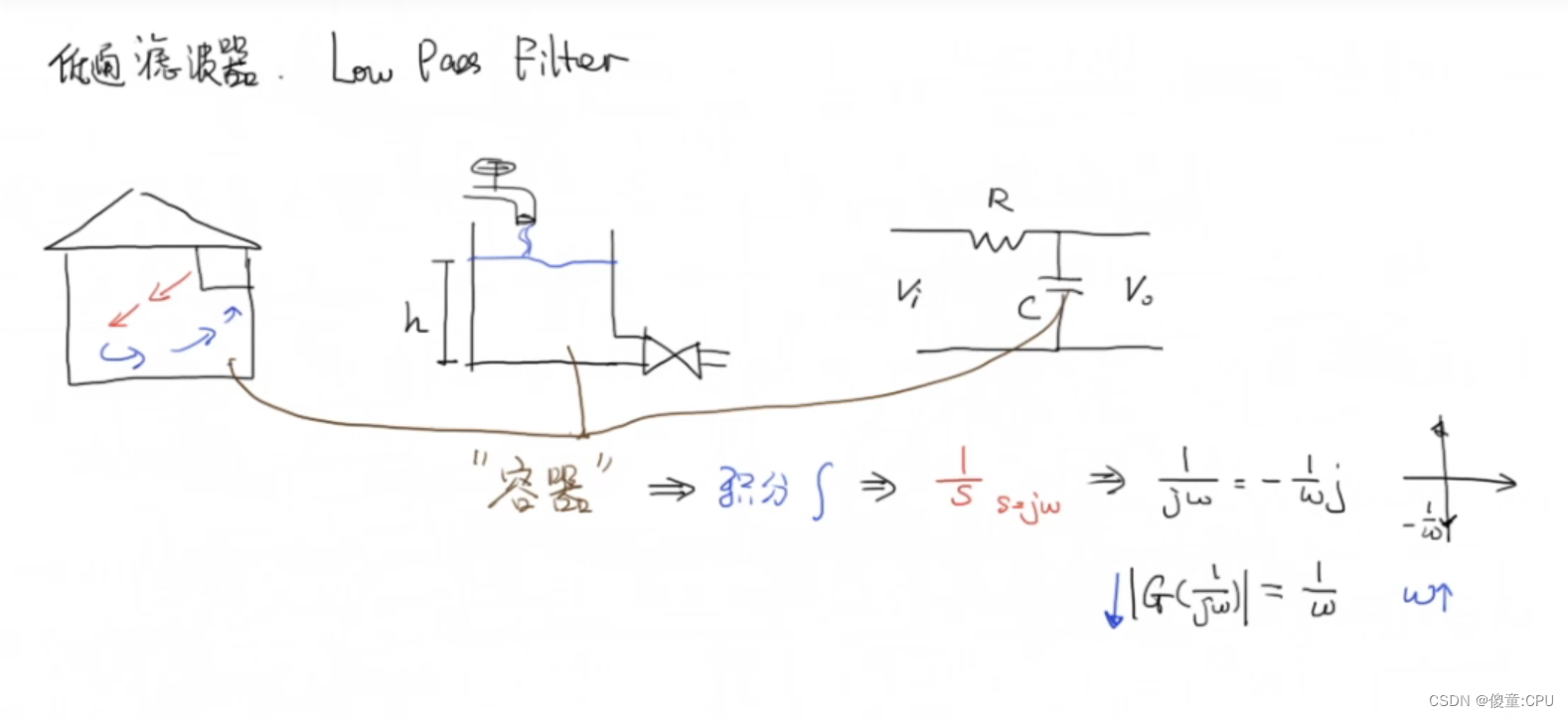
流体系统建模
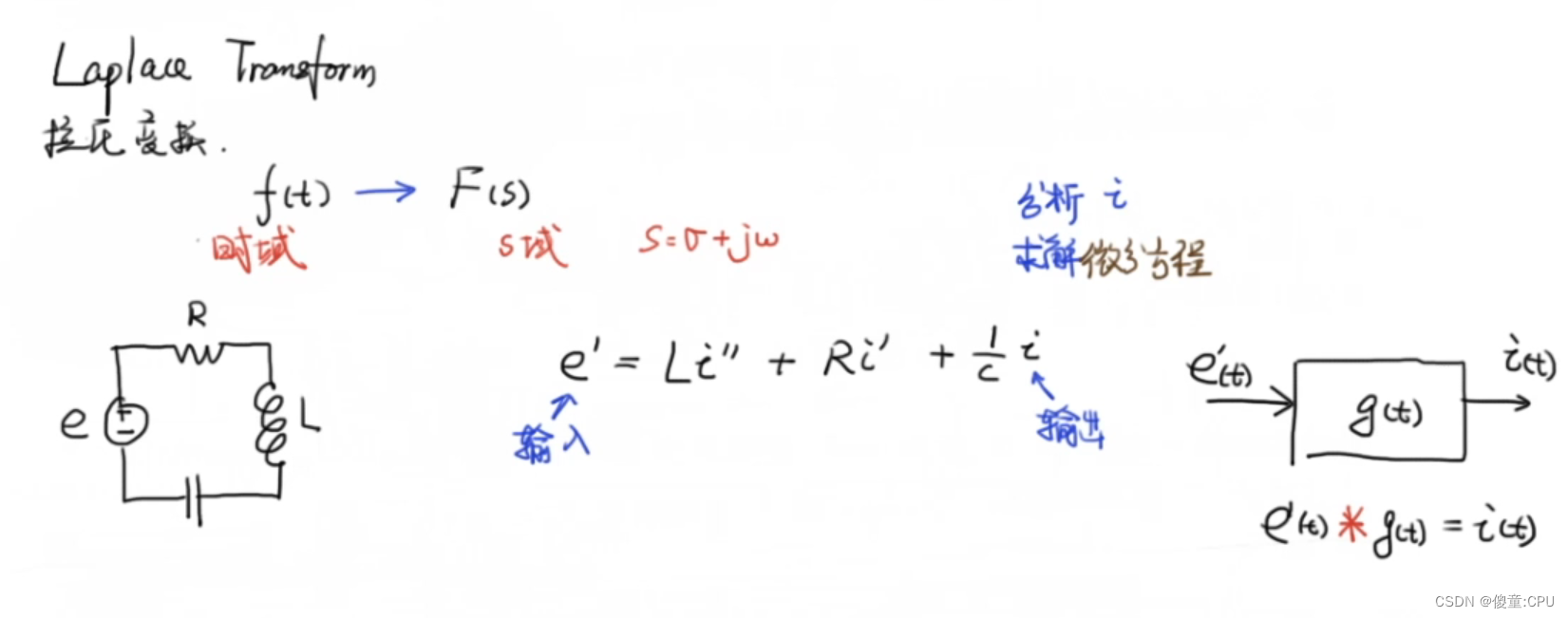
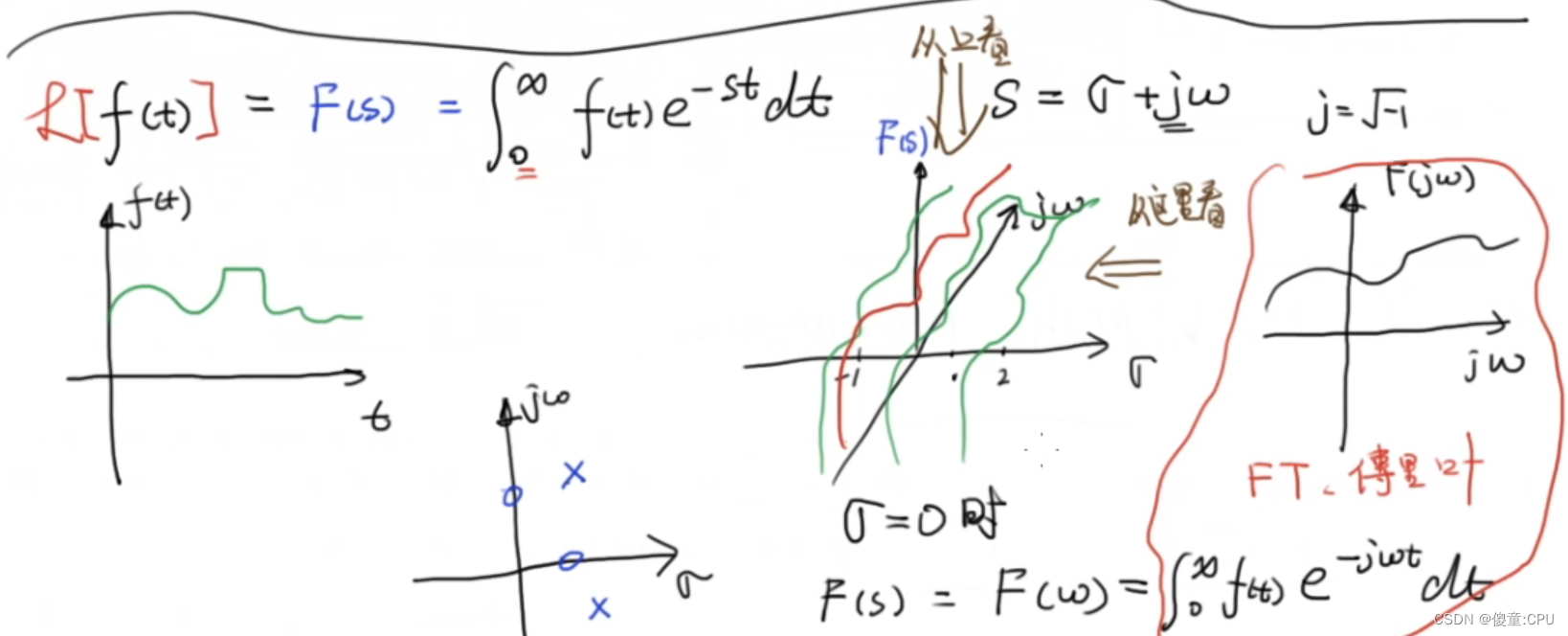
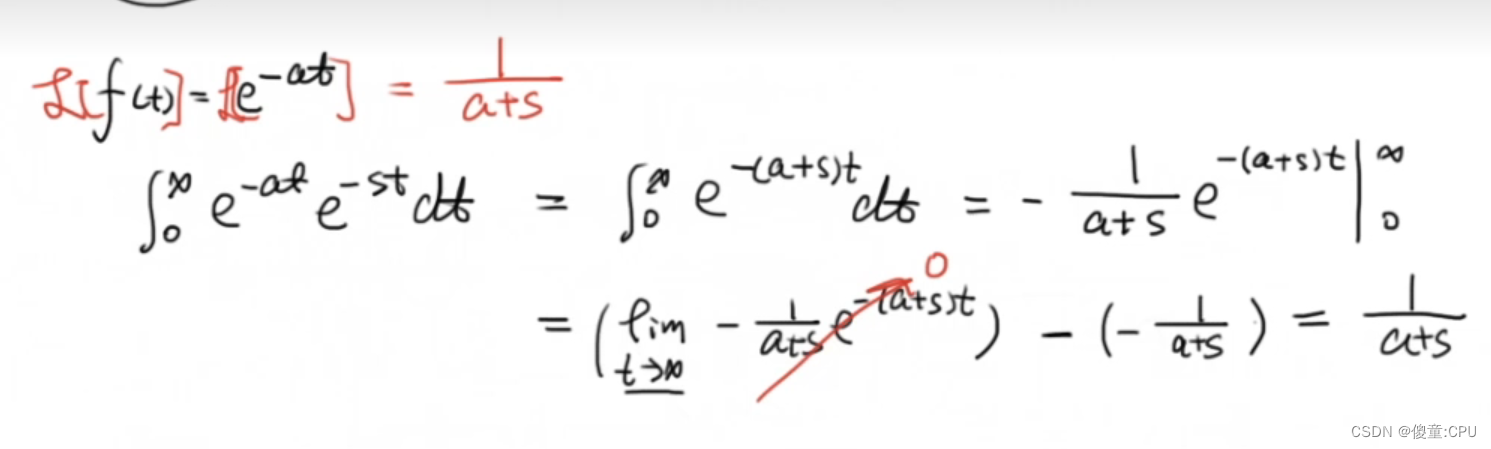
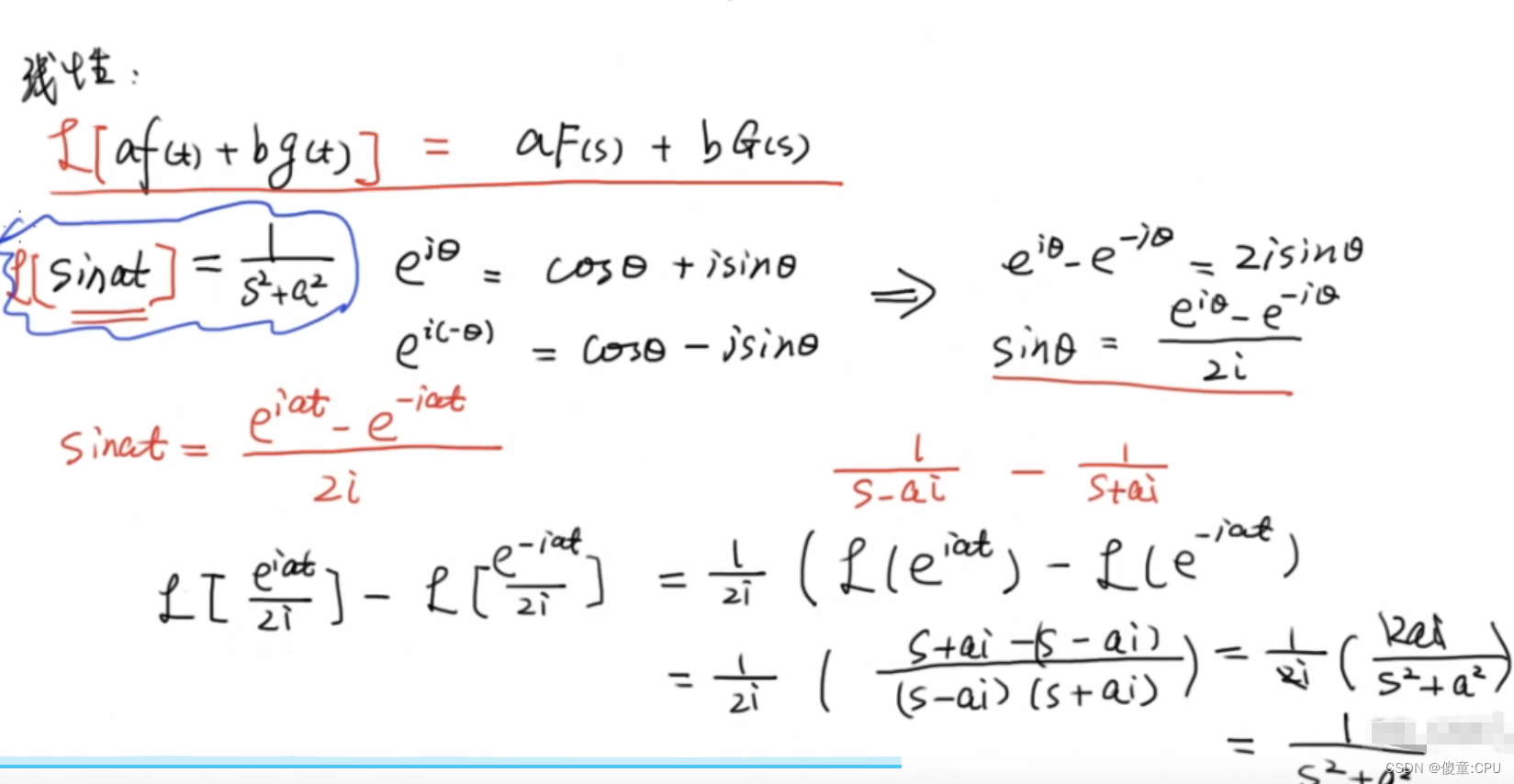
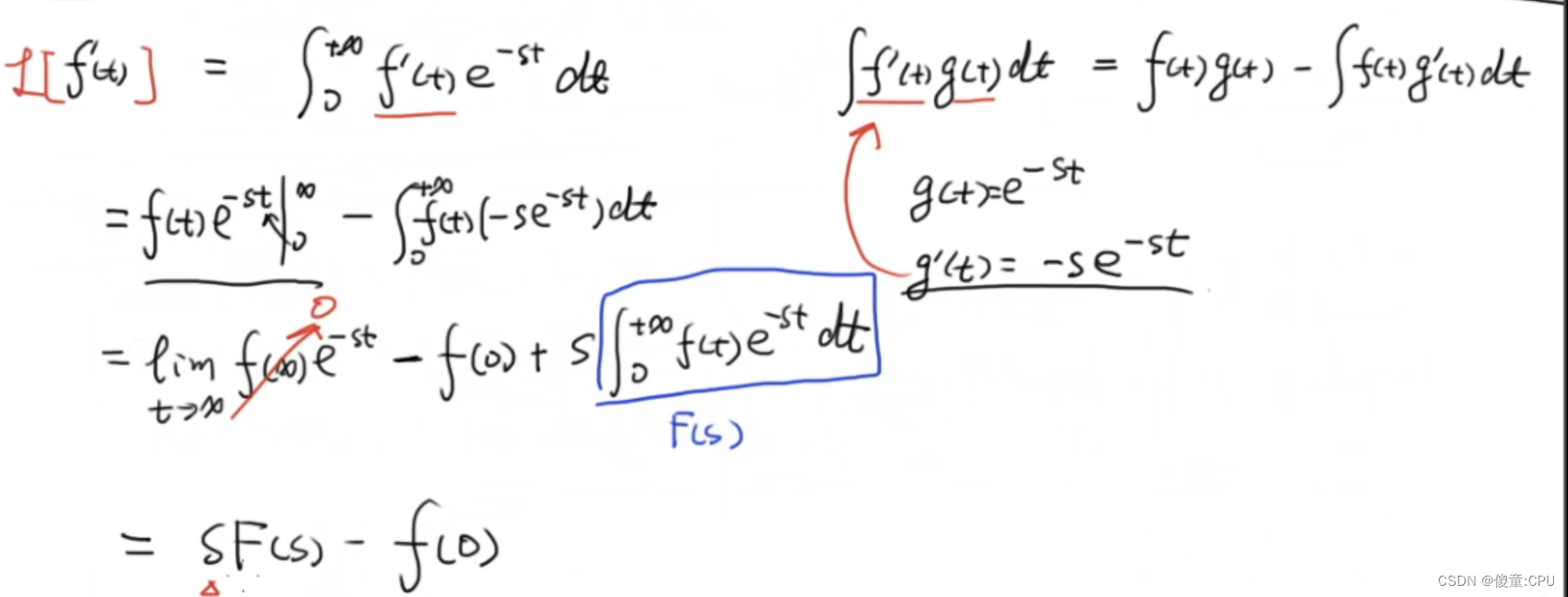
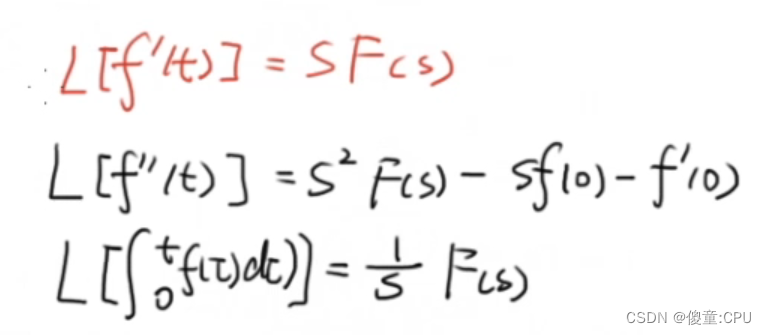
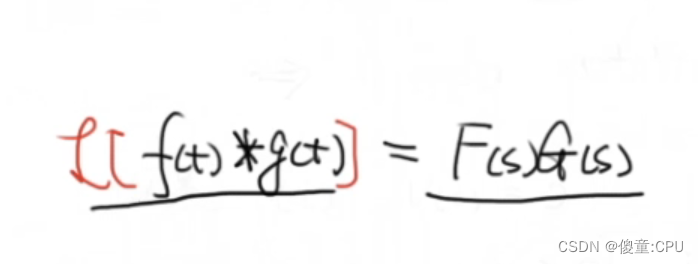
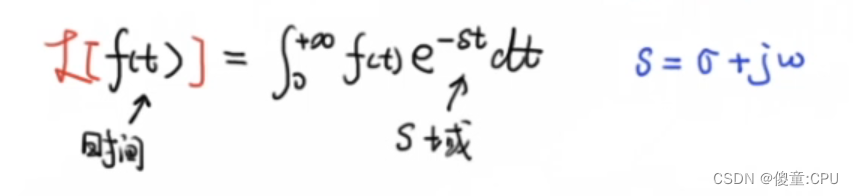
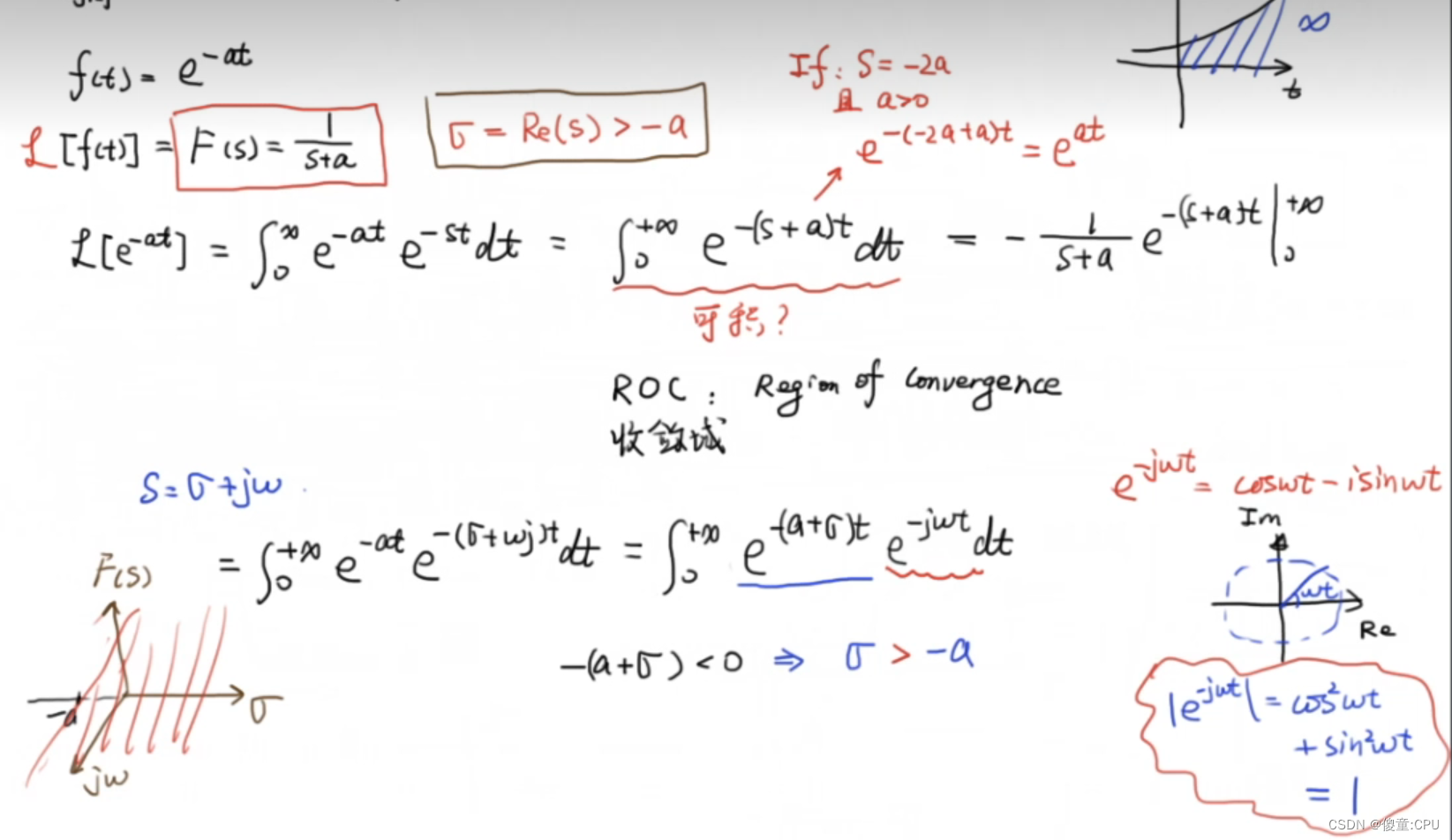
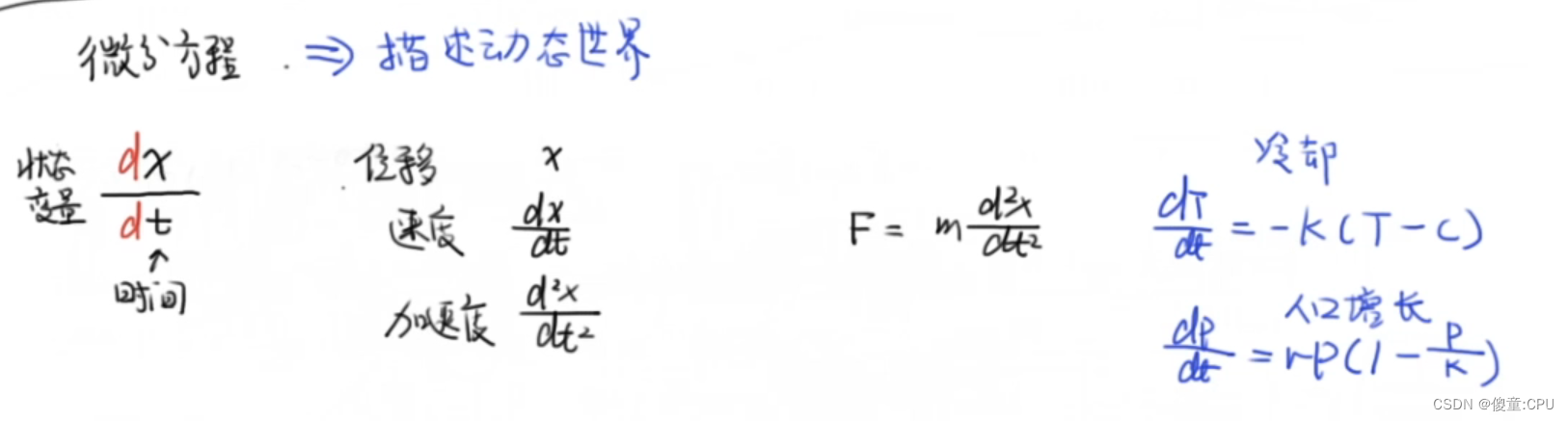
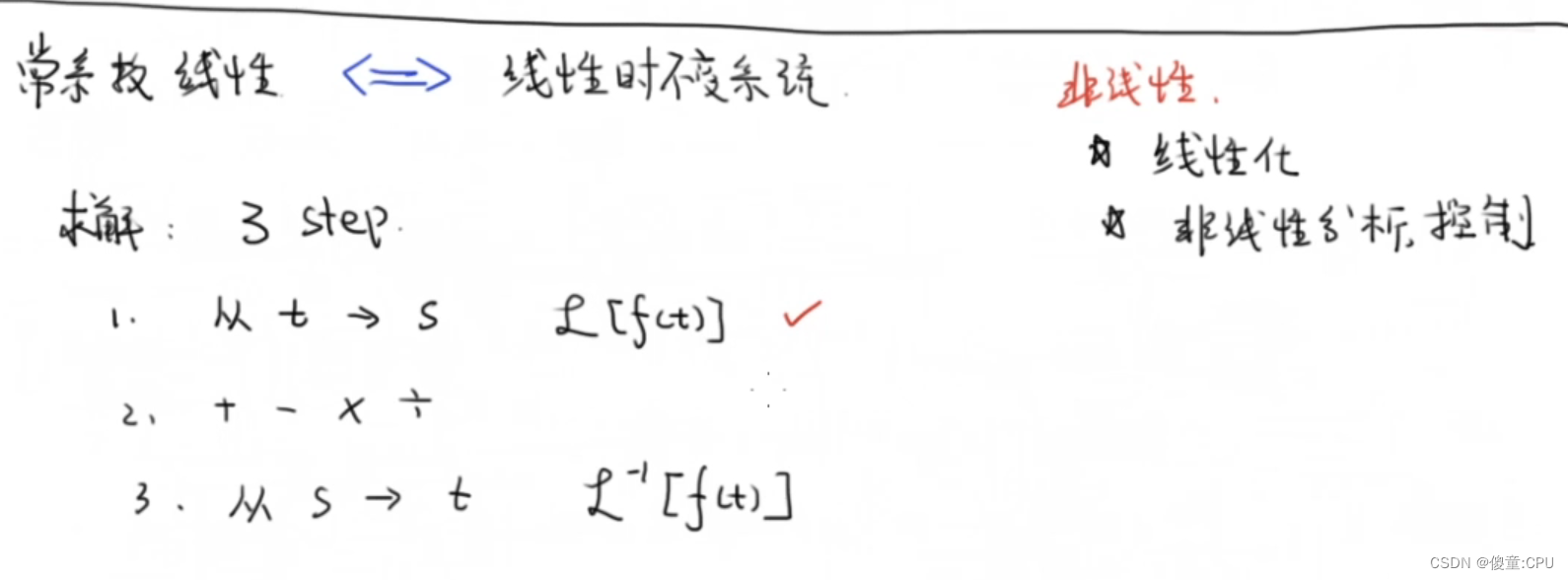
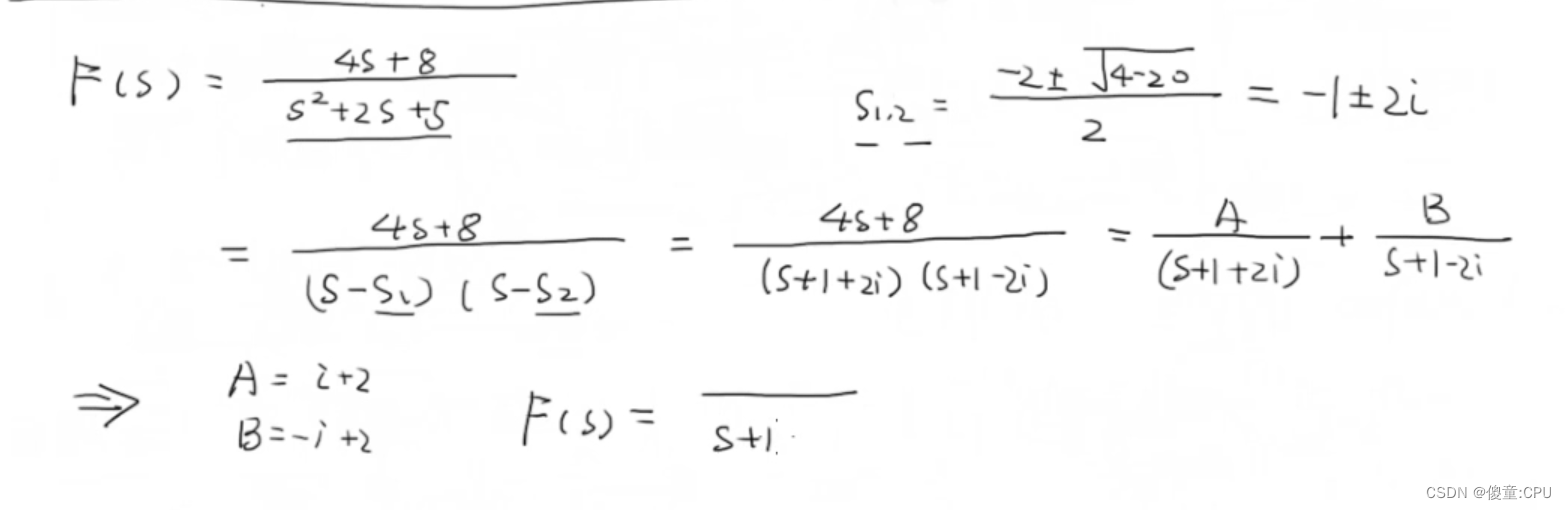
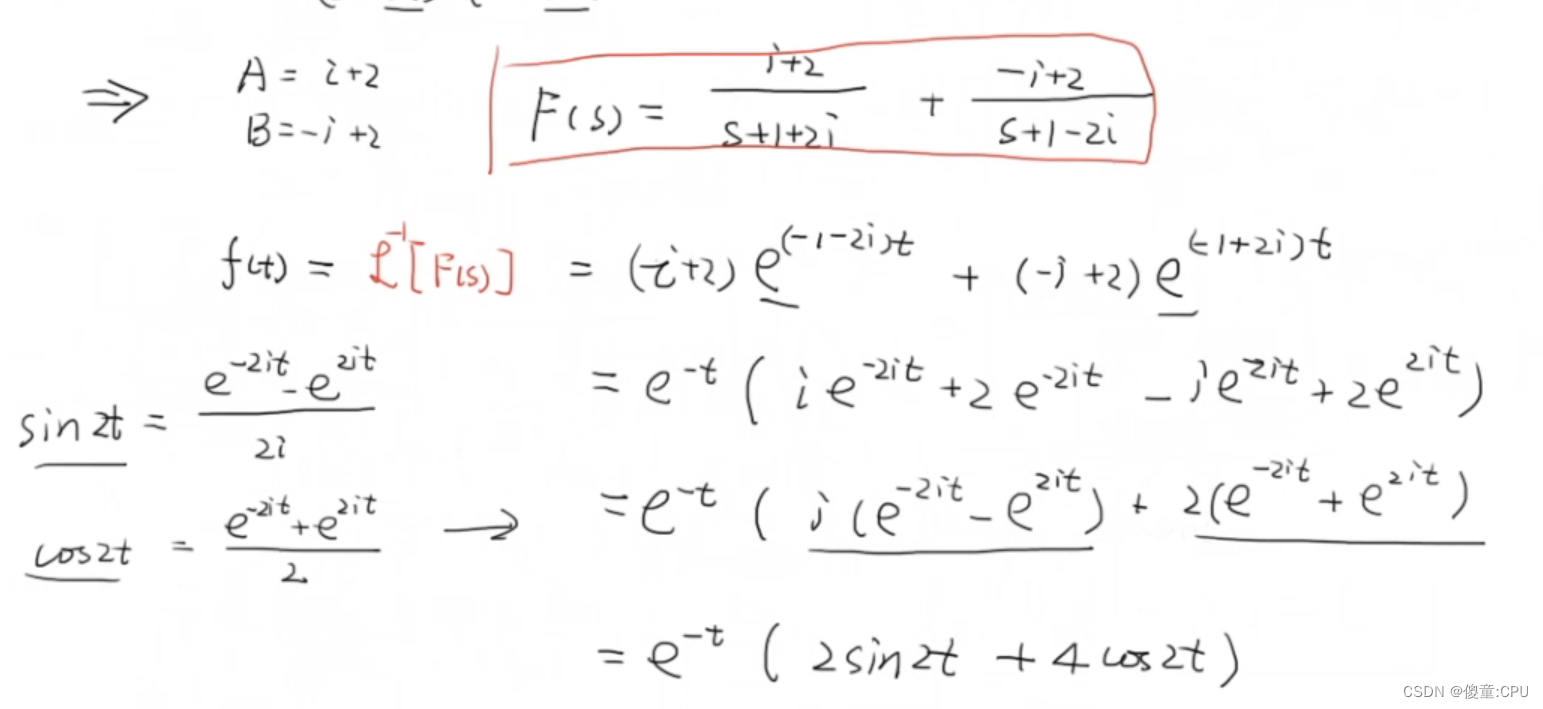
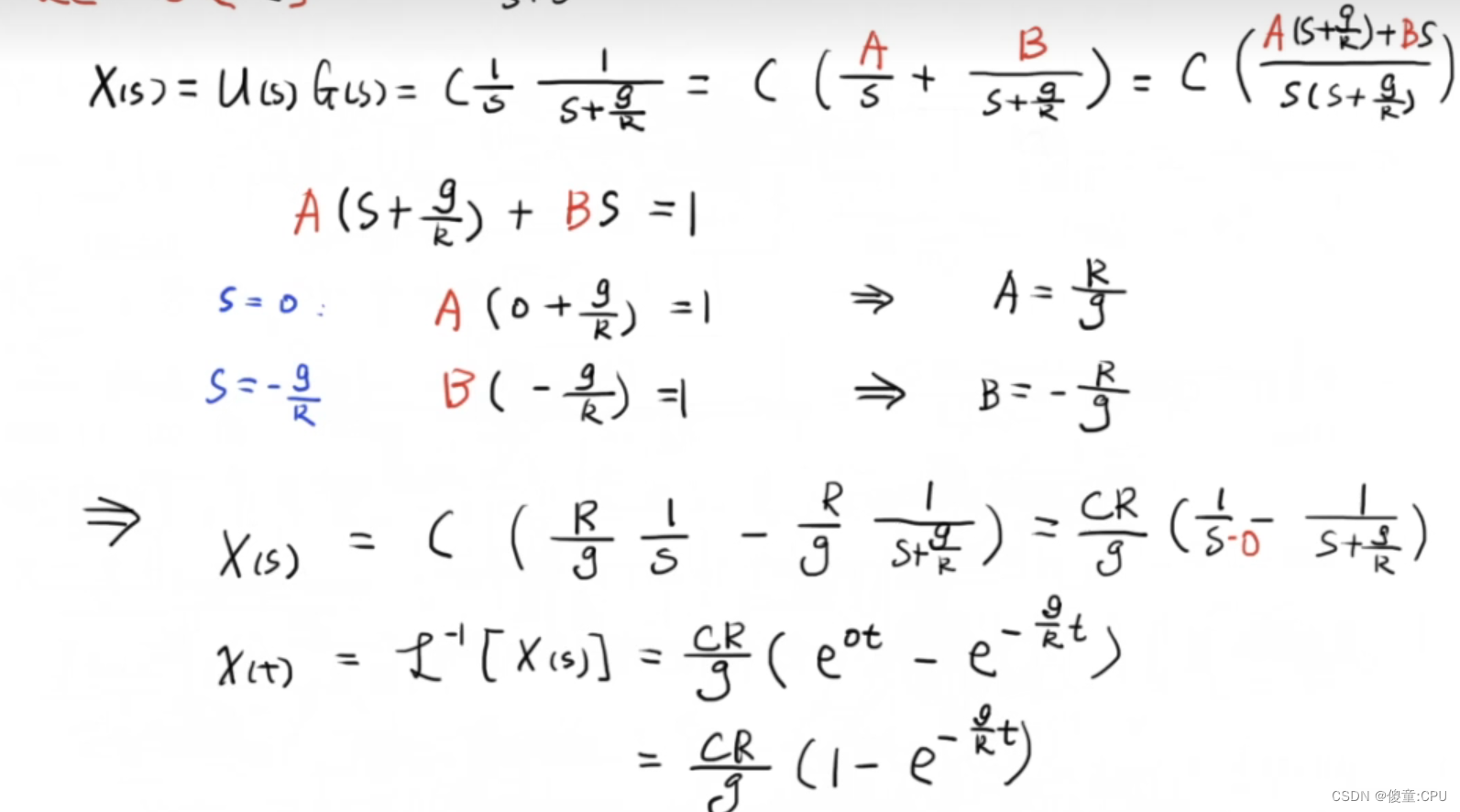
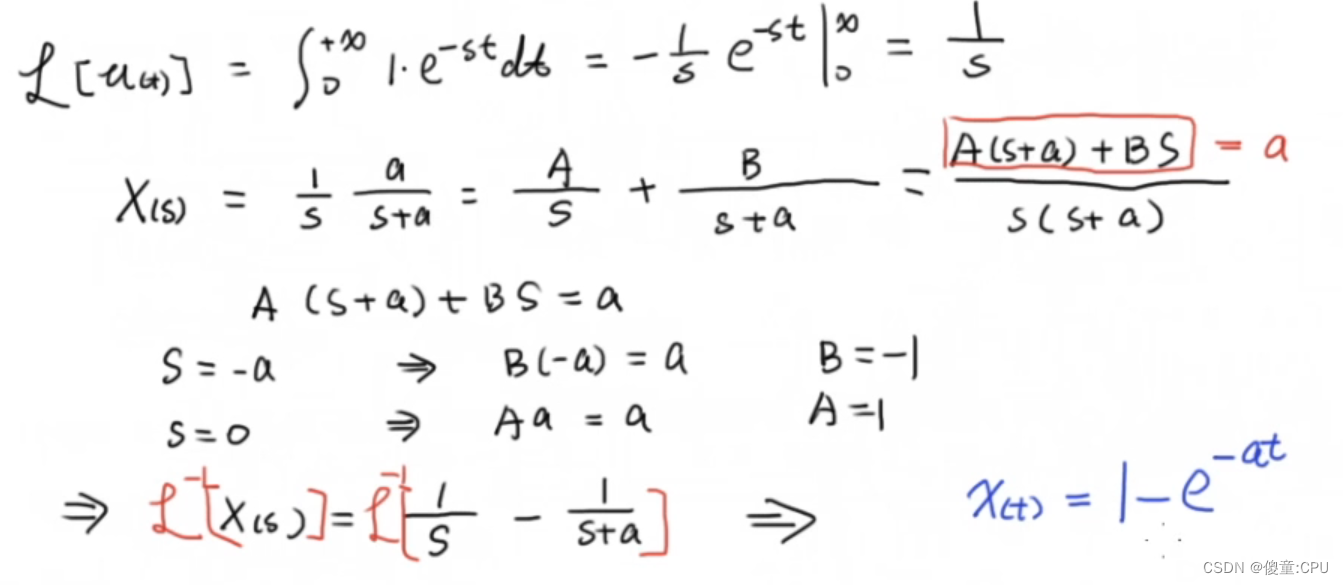
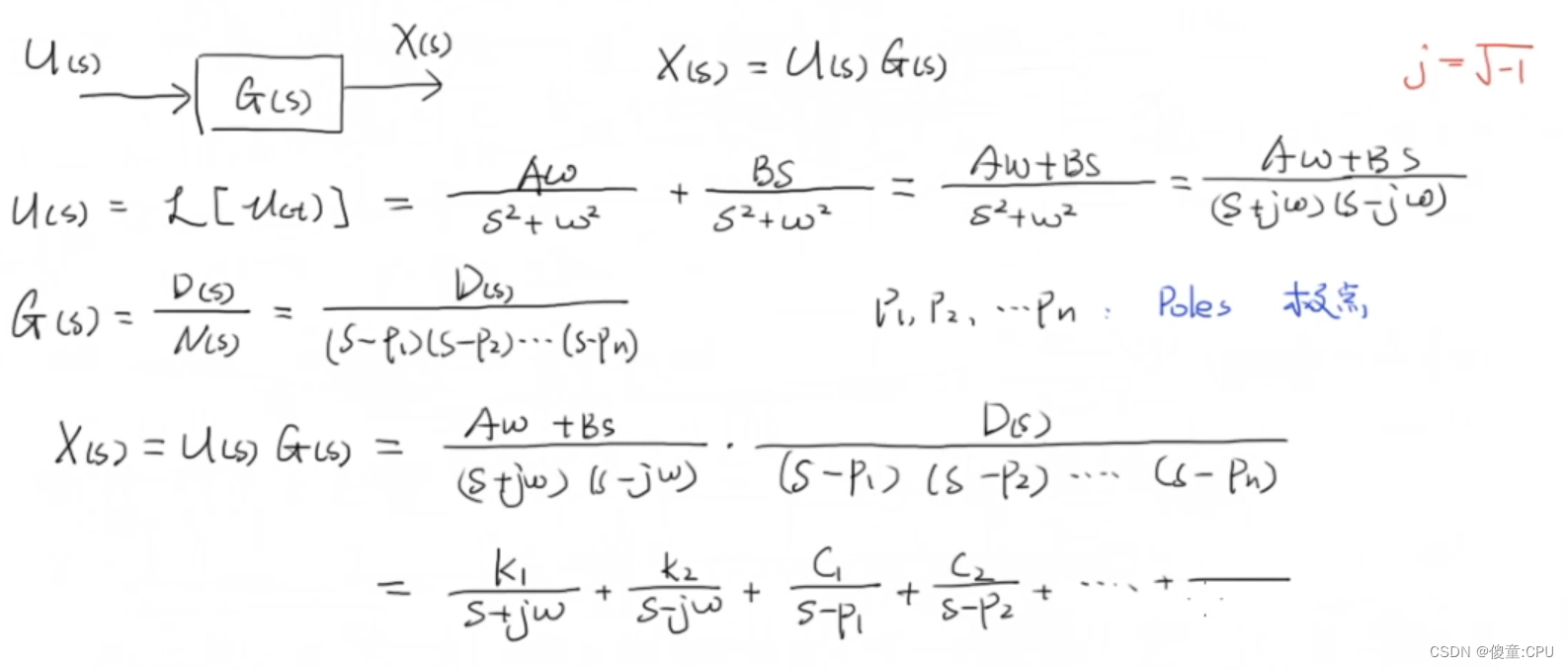
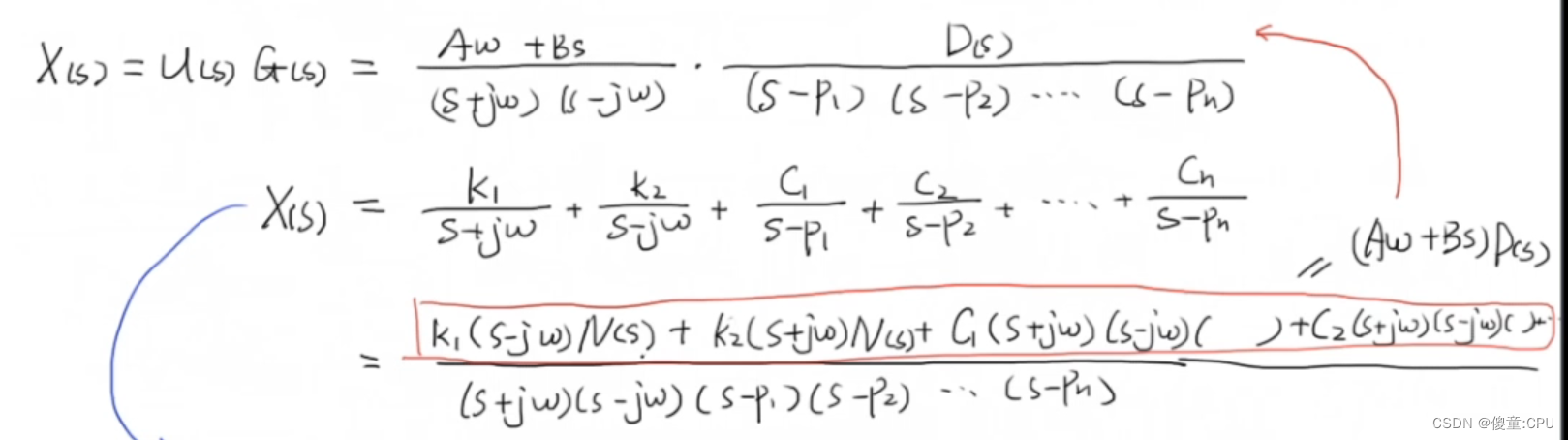
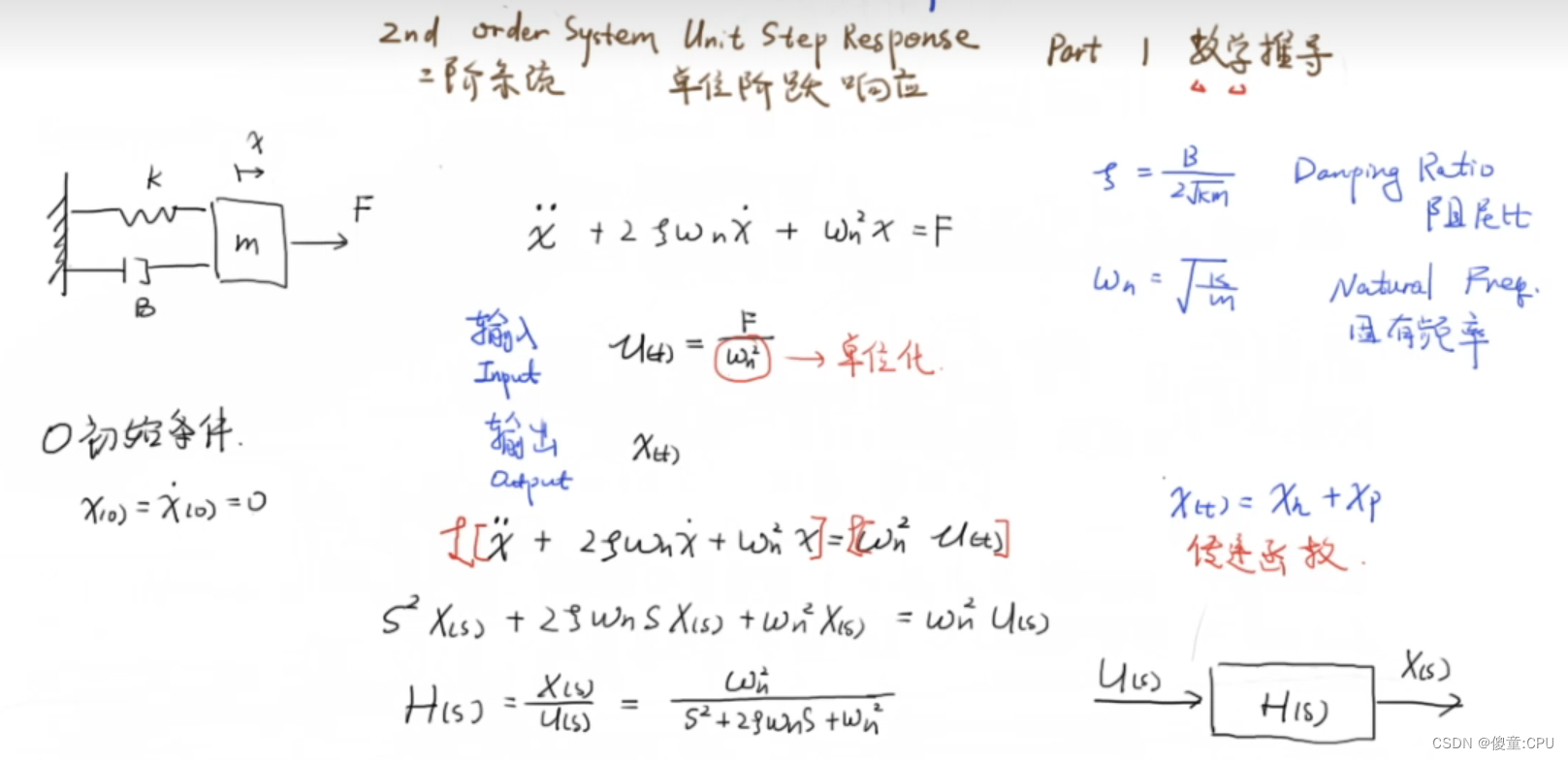
拉普拉斯变换、传递函数、微分方程


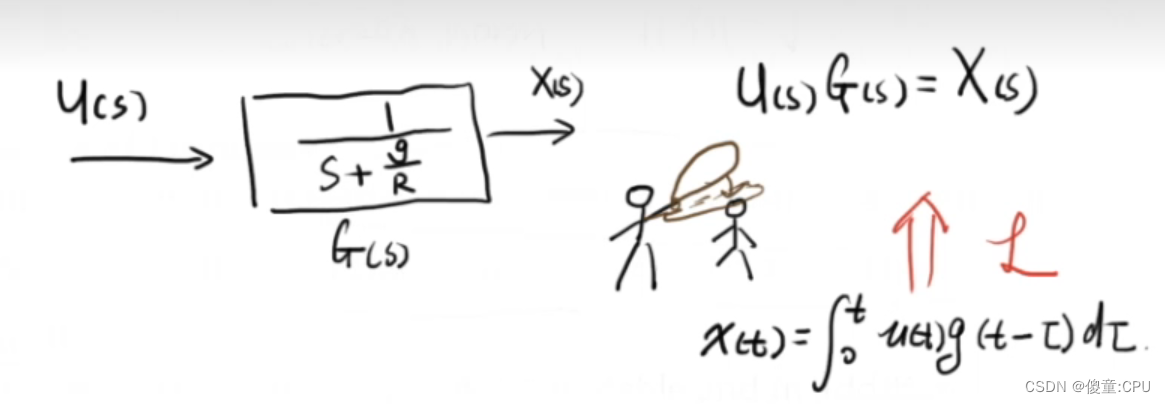
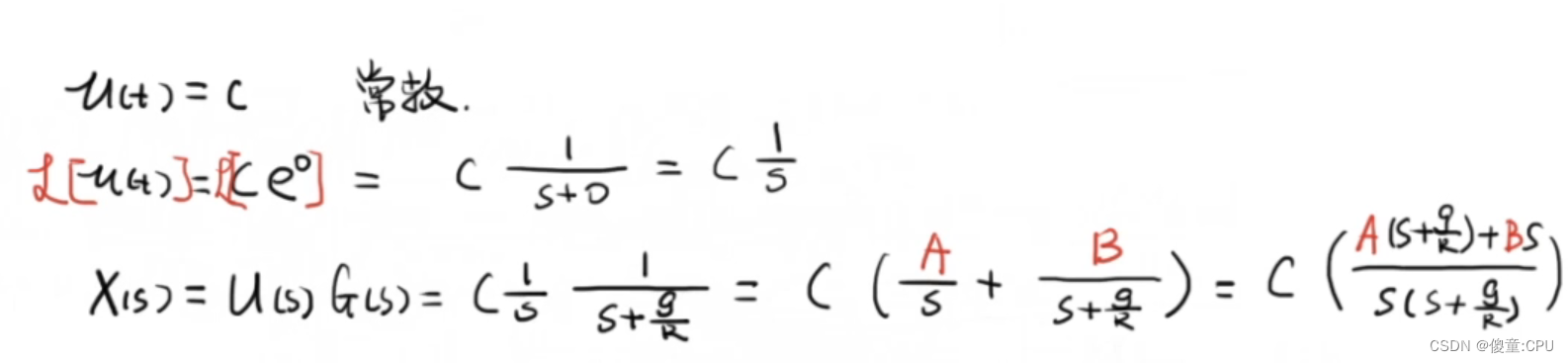
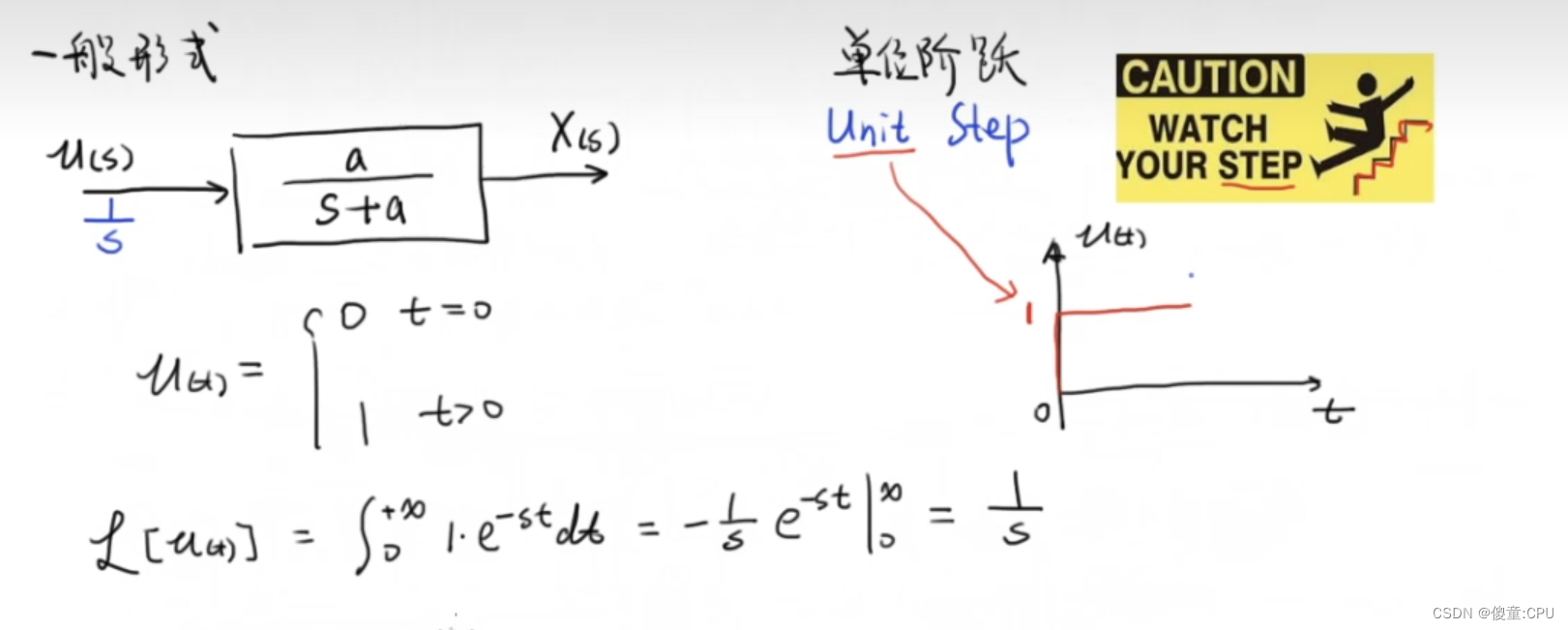
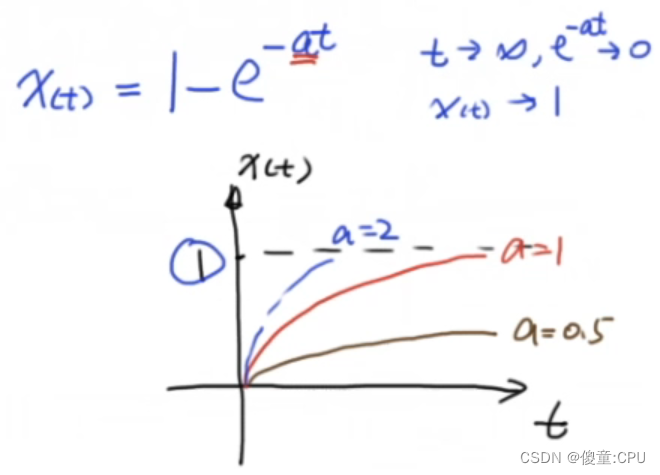
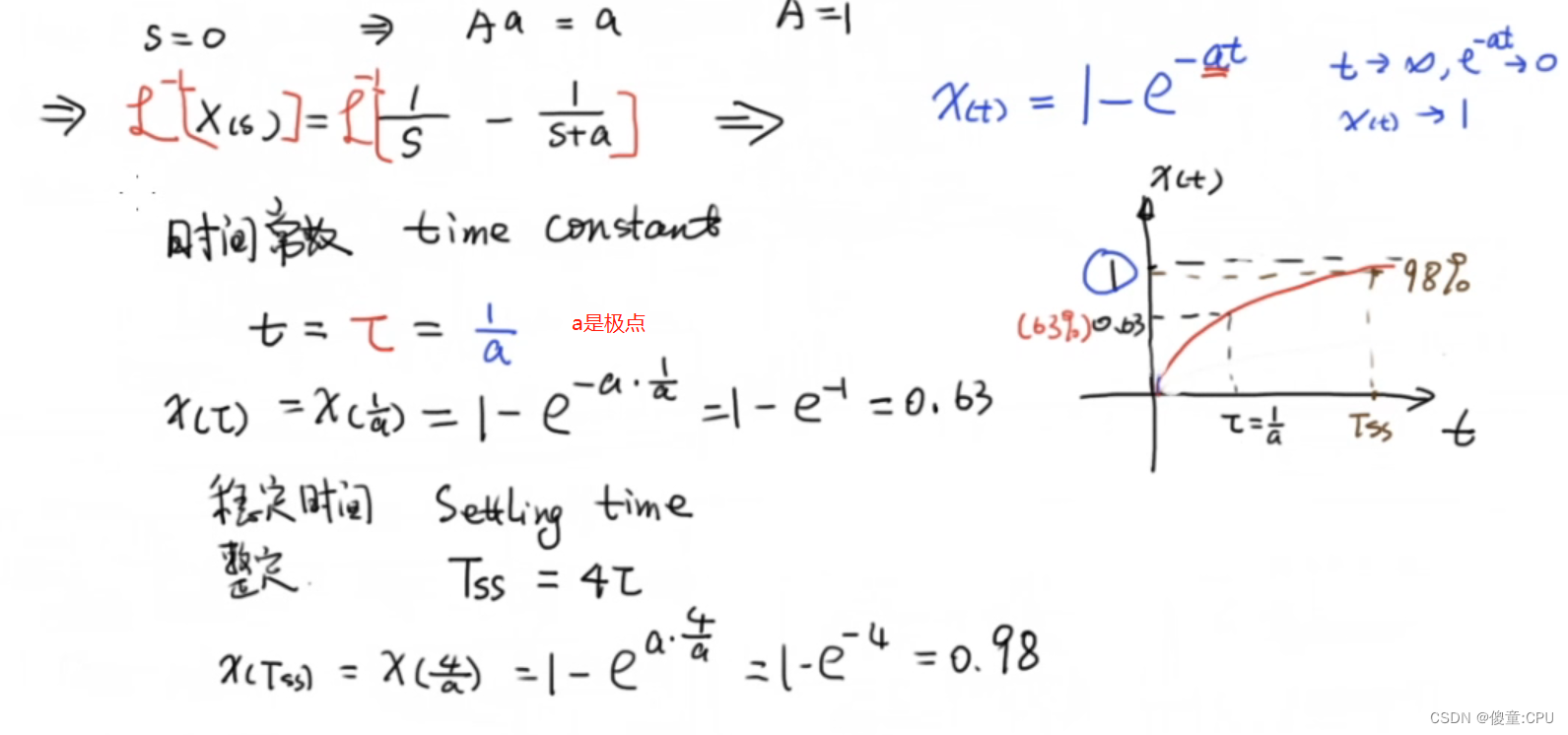
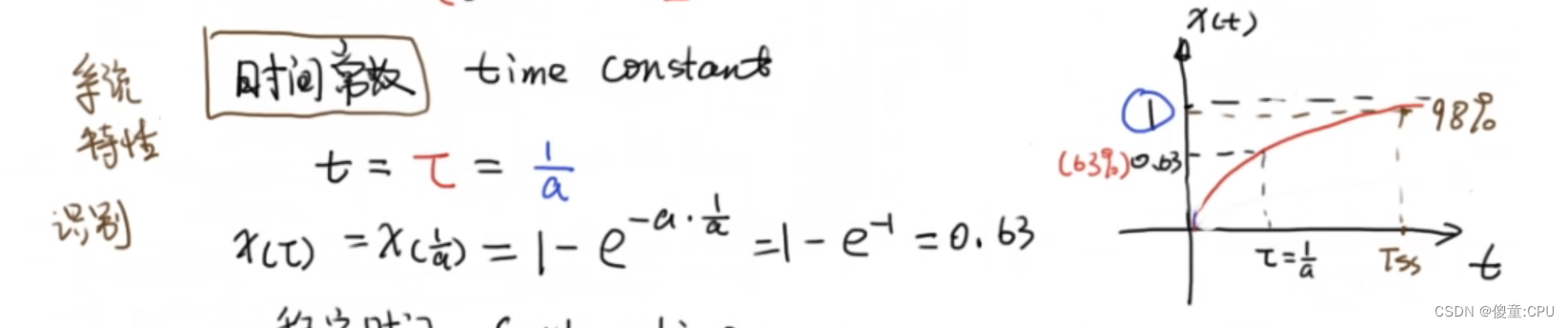
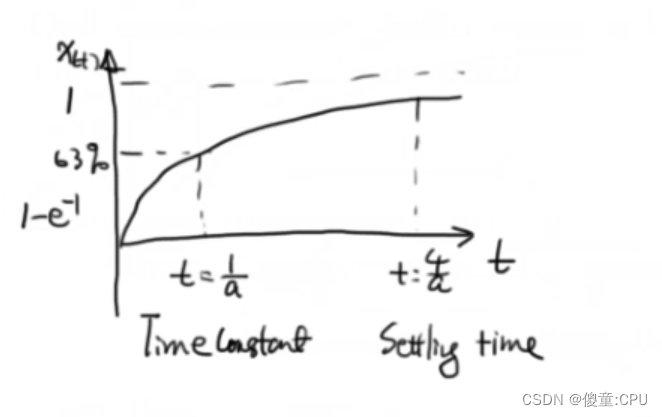
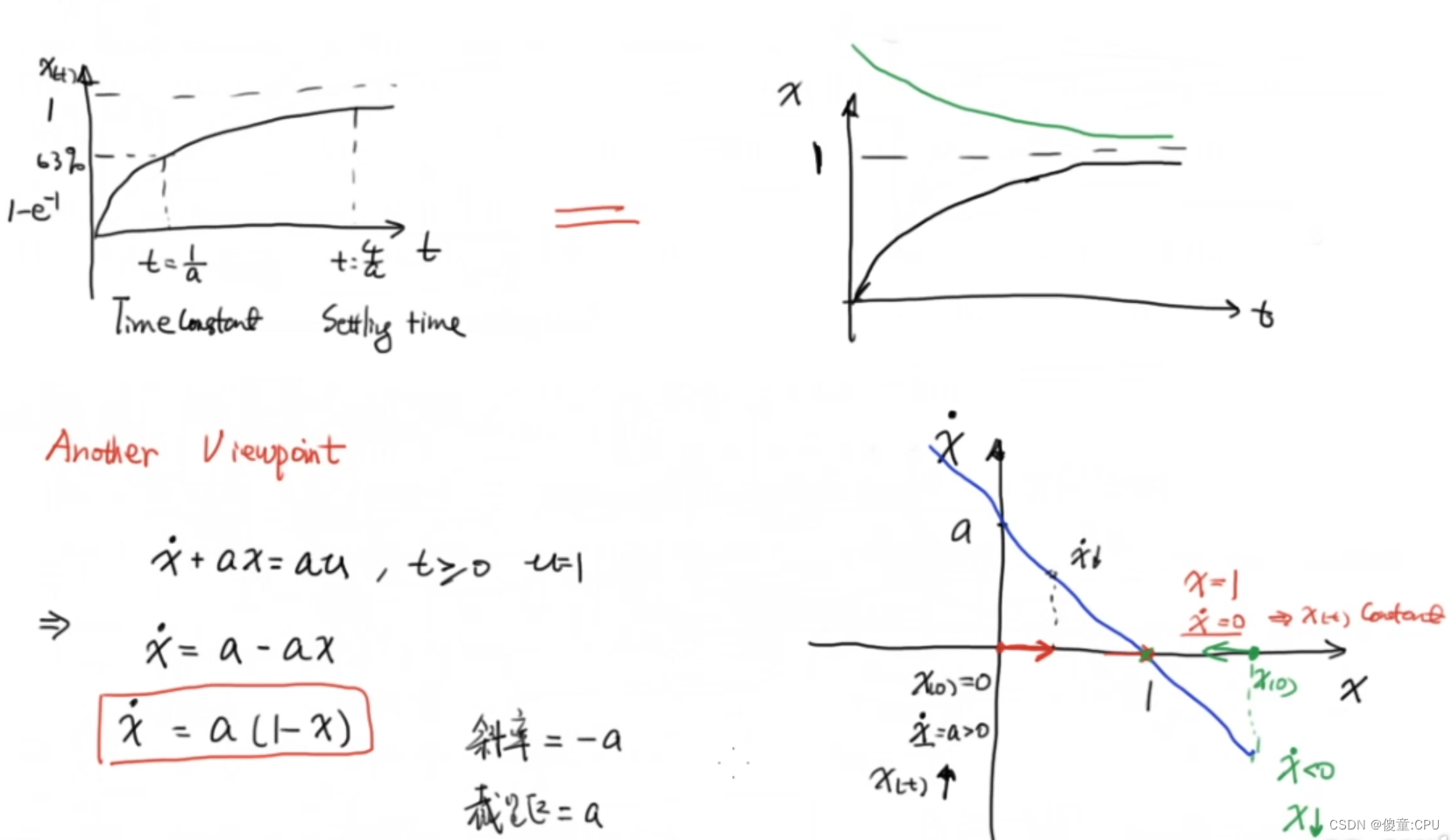
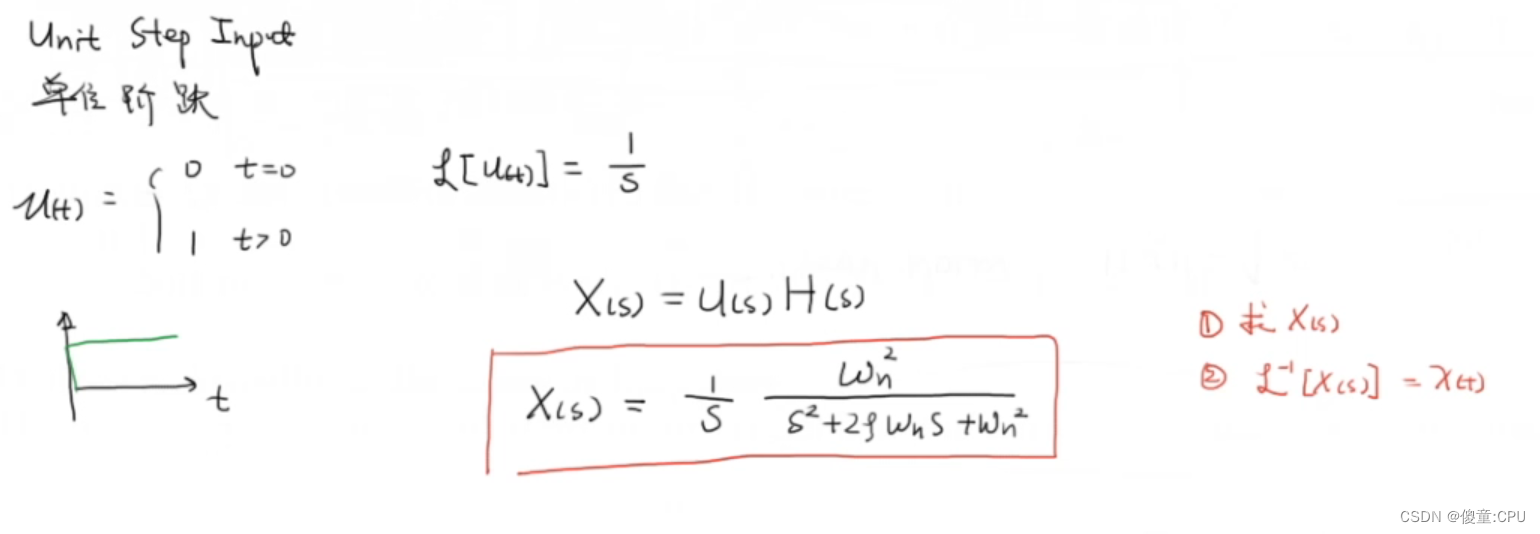
一阶系统的单位阶跃响应、时间常数
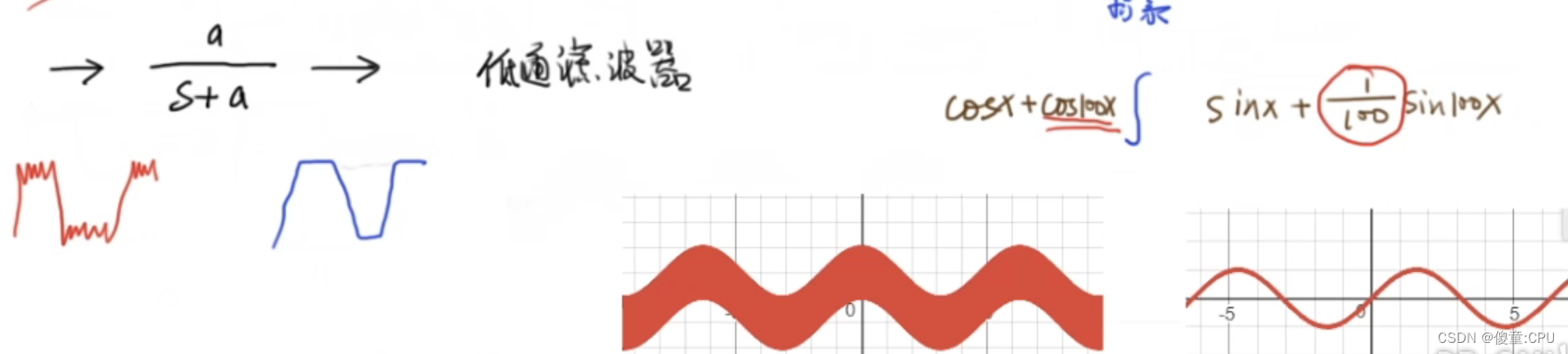


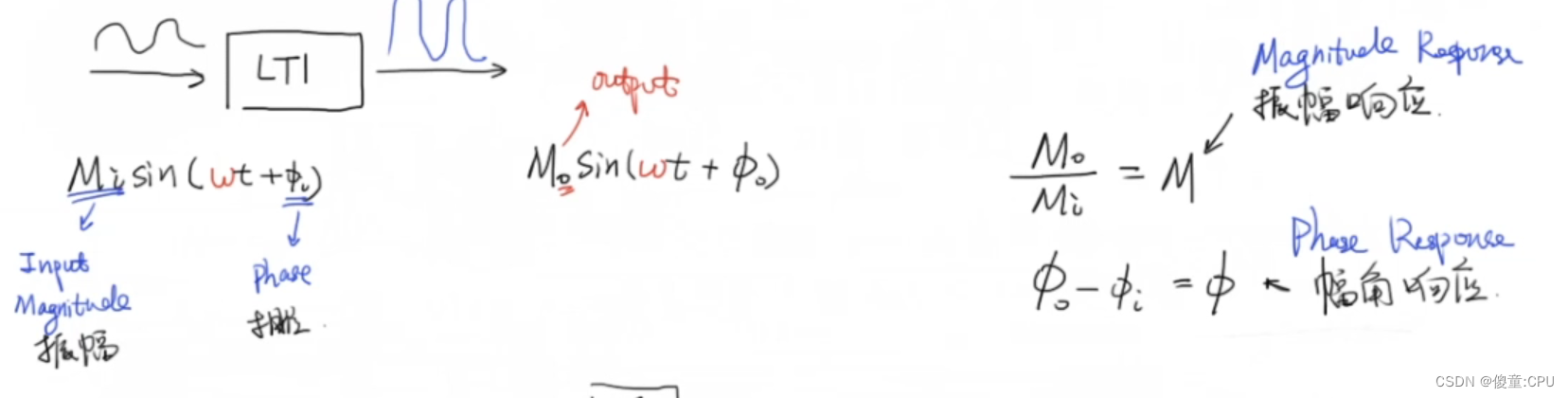
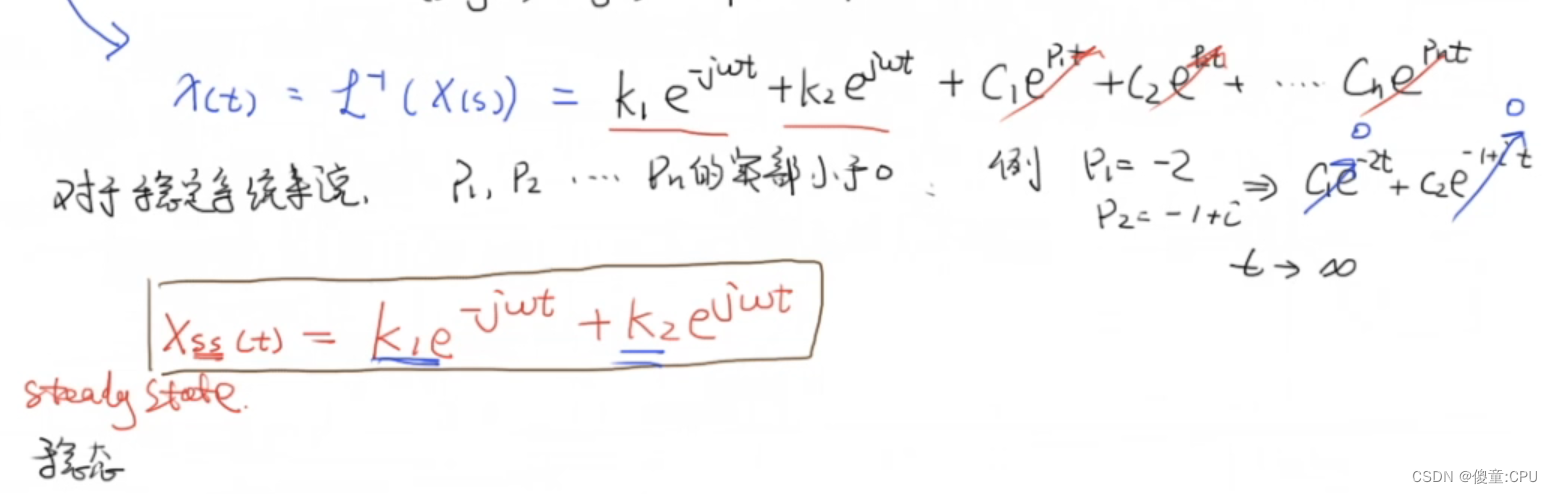
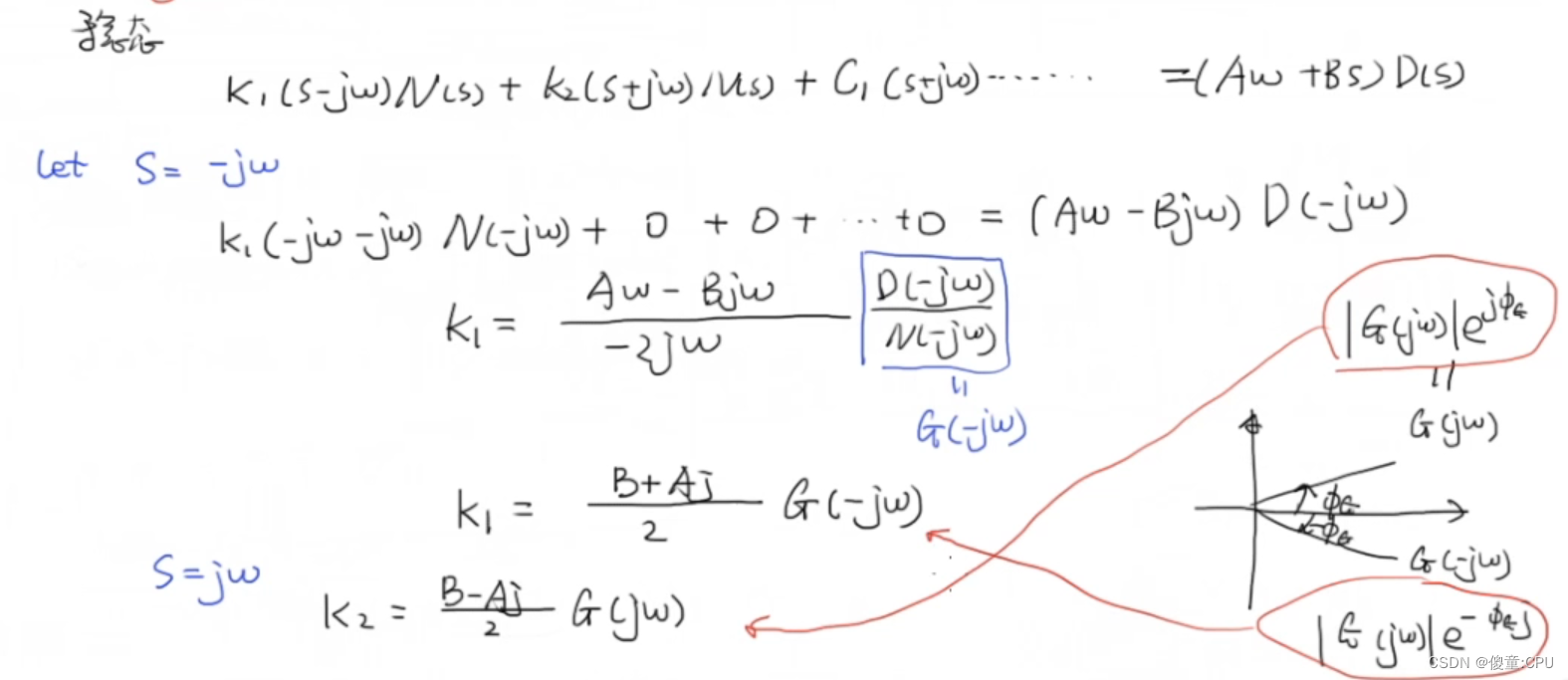
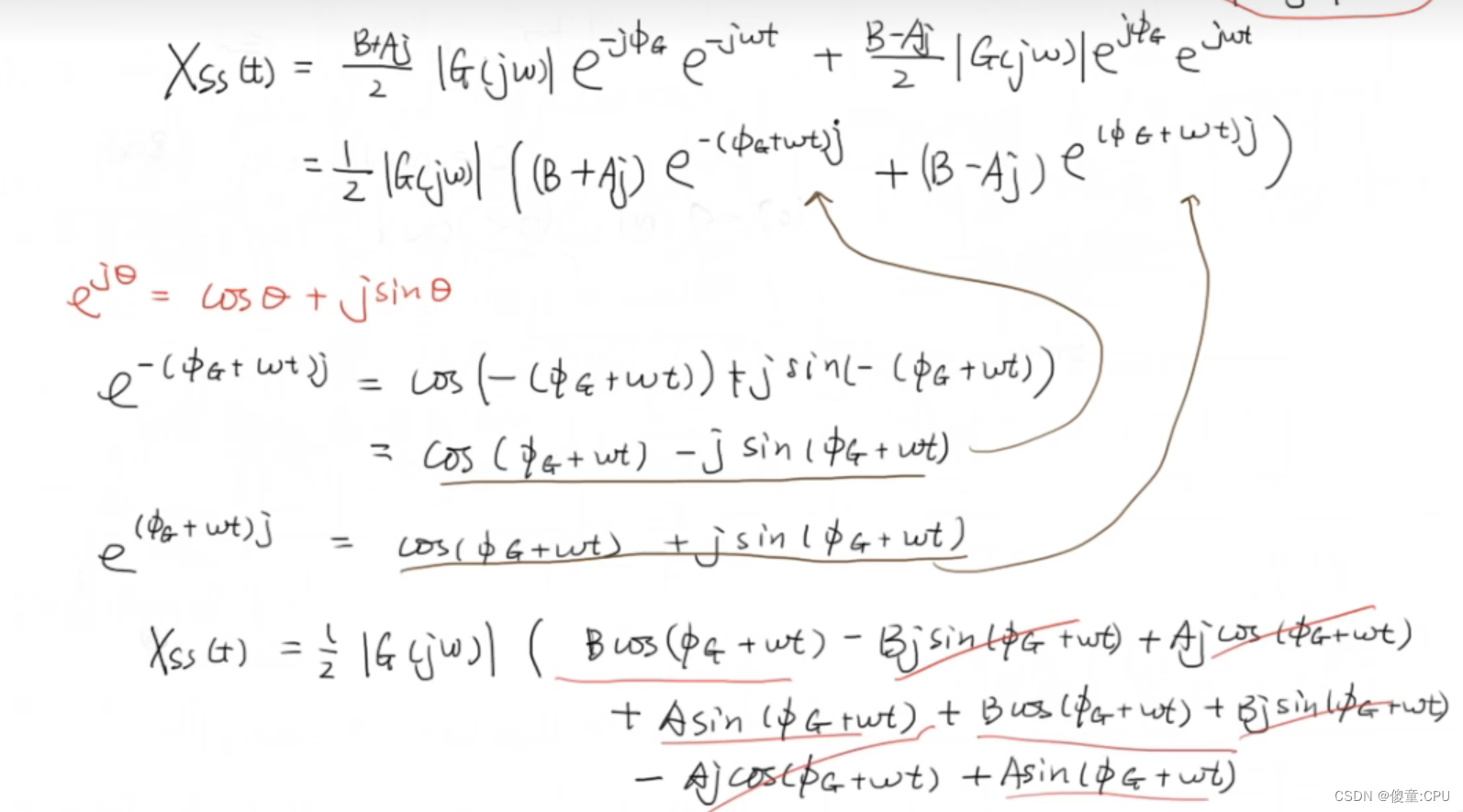
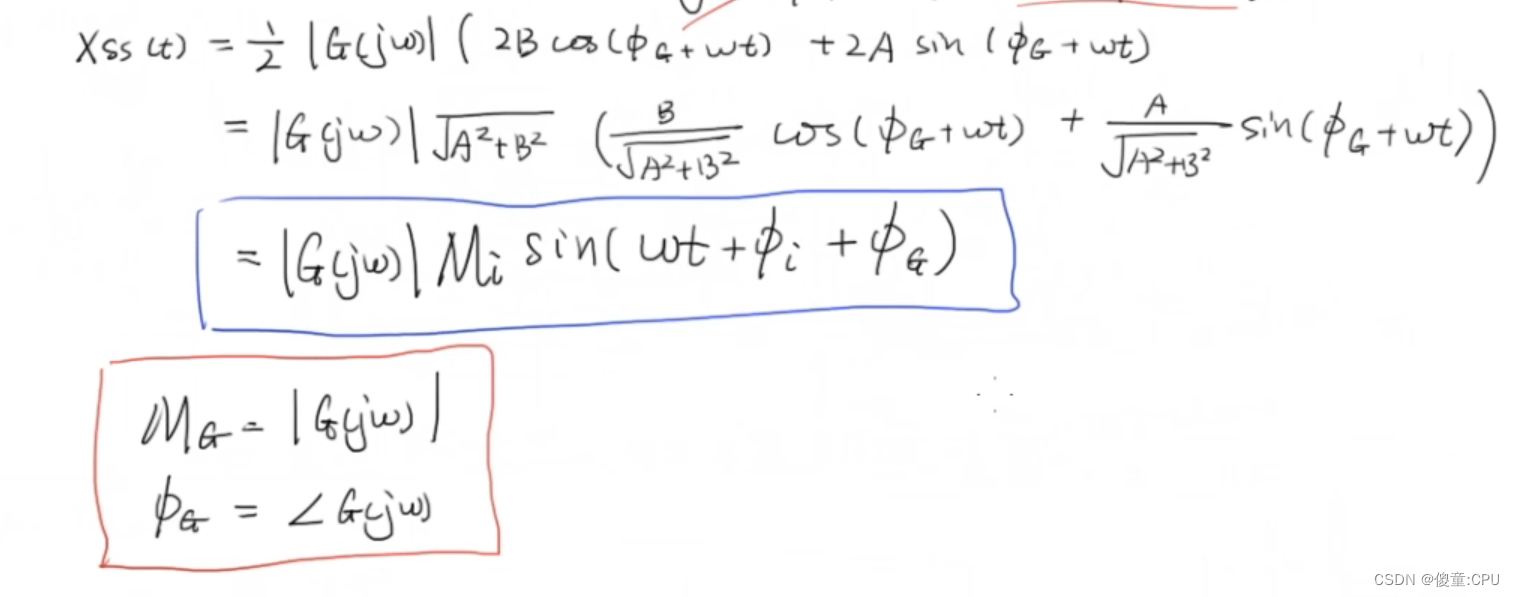
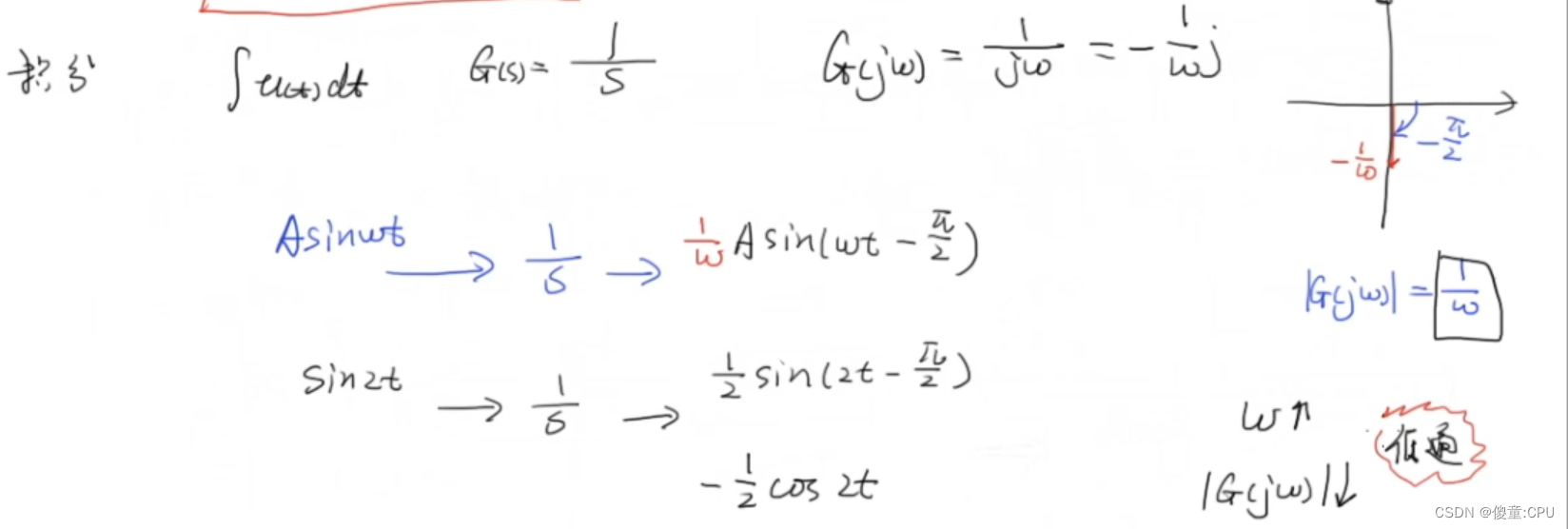
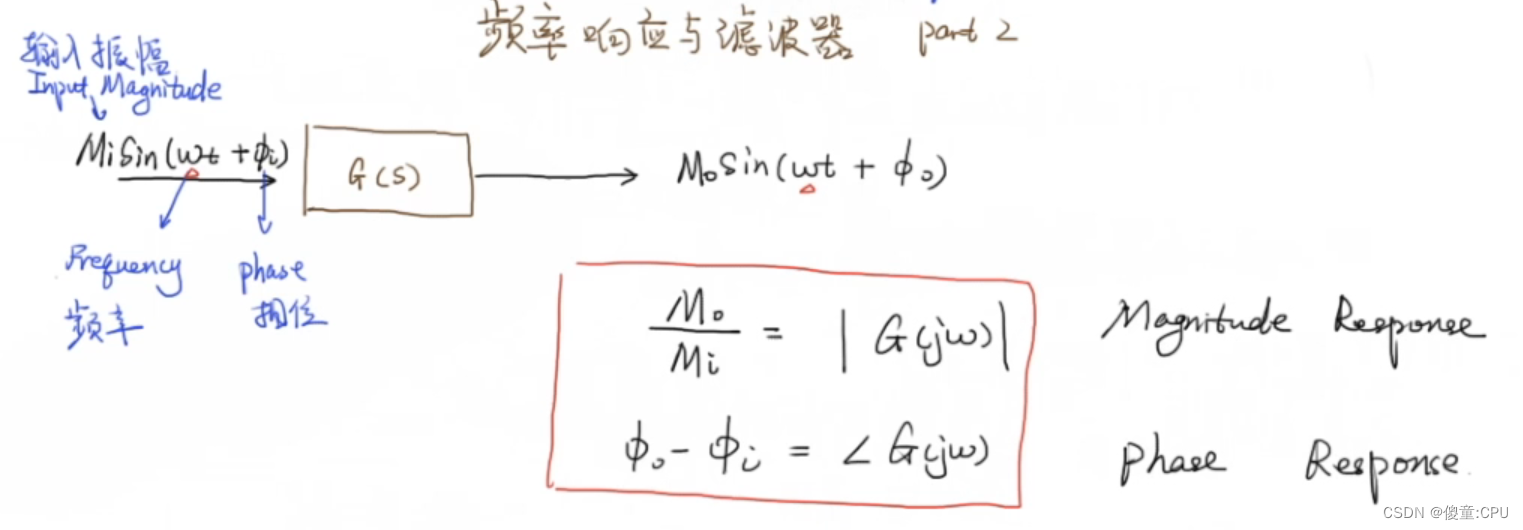
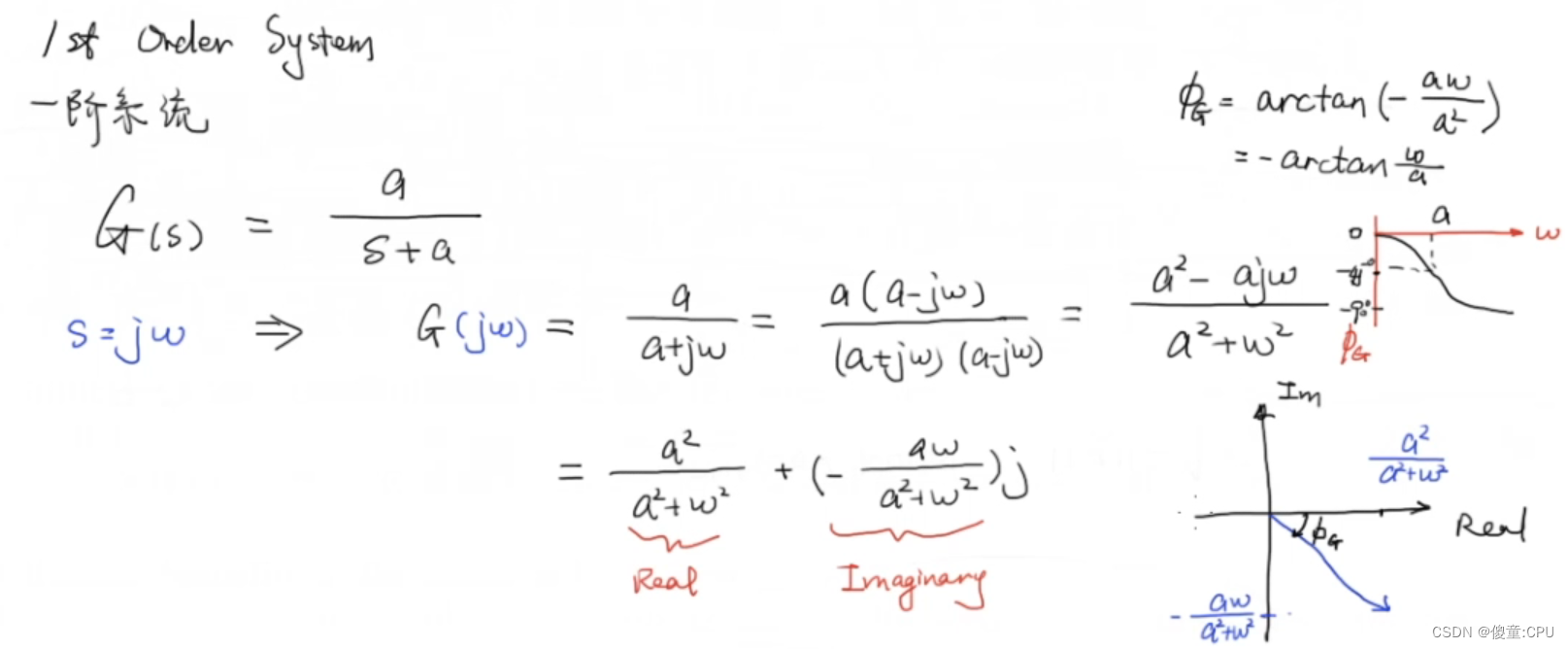
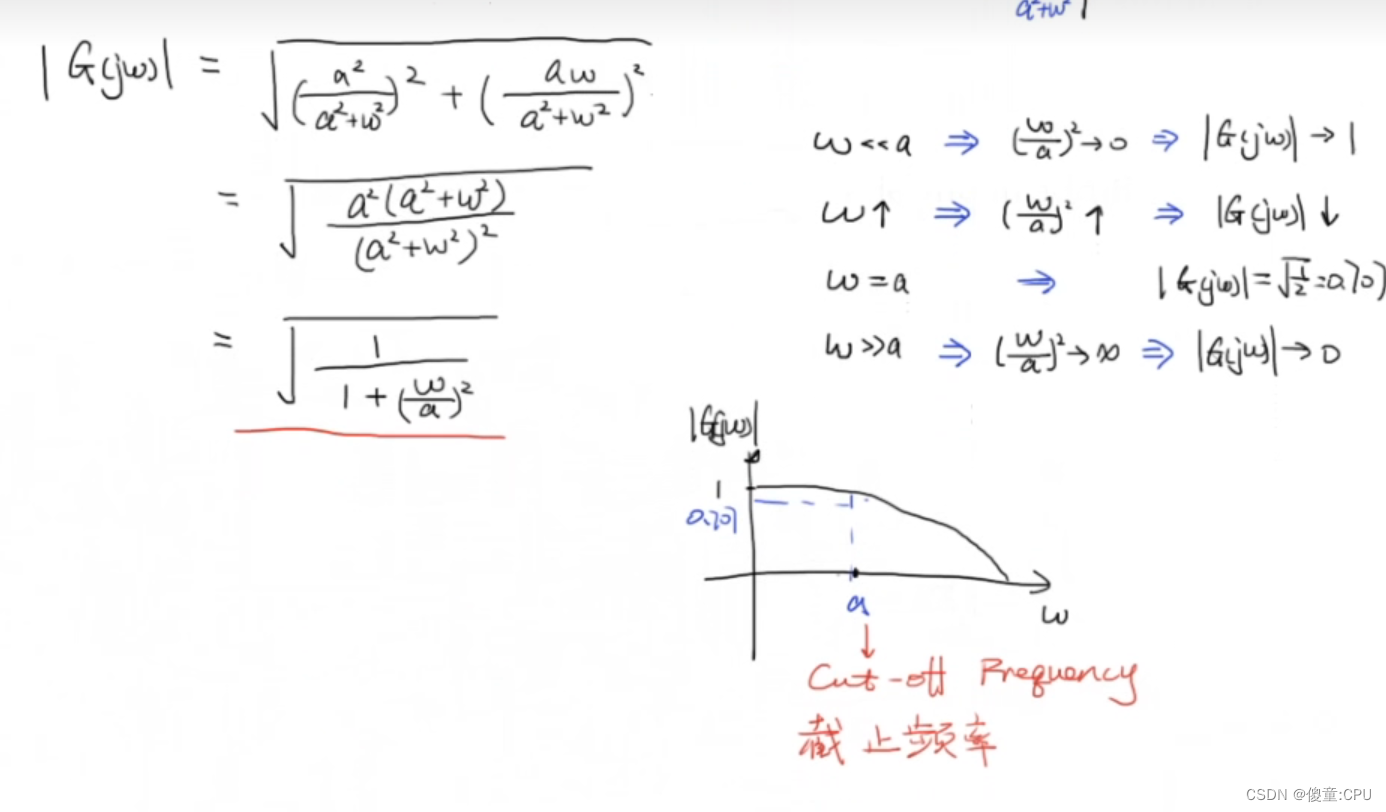
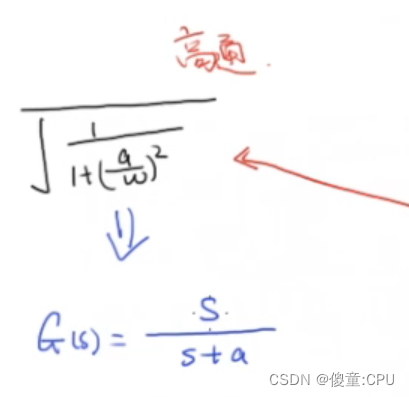
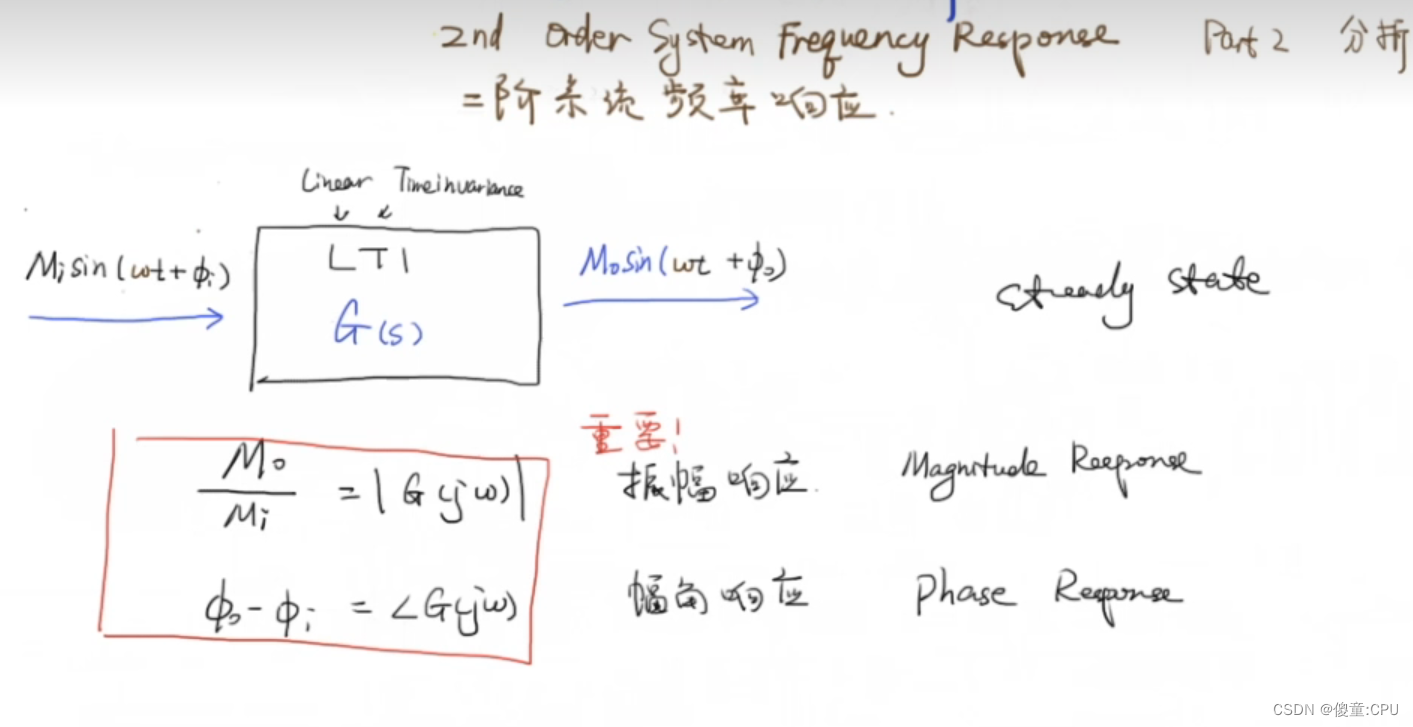
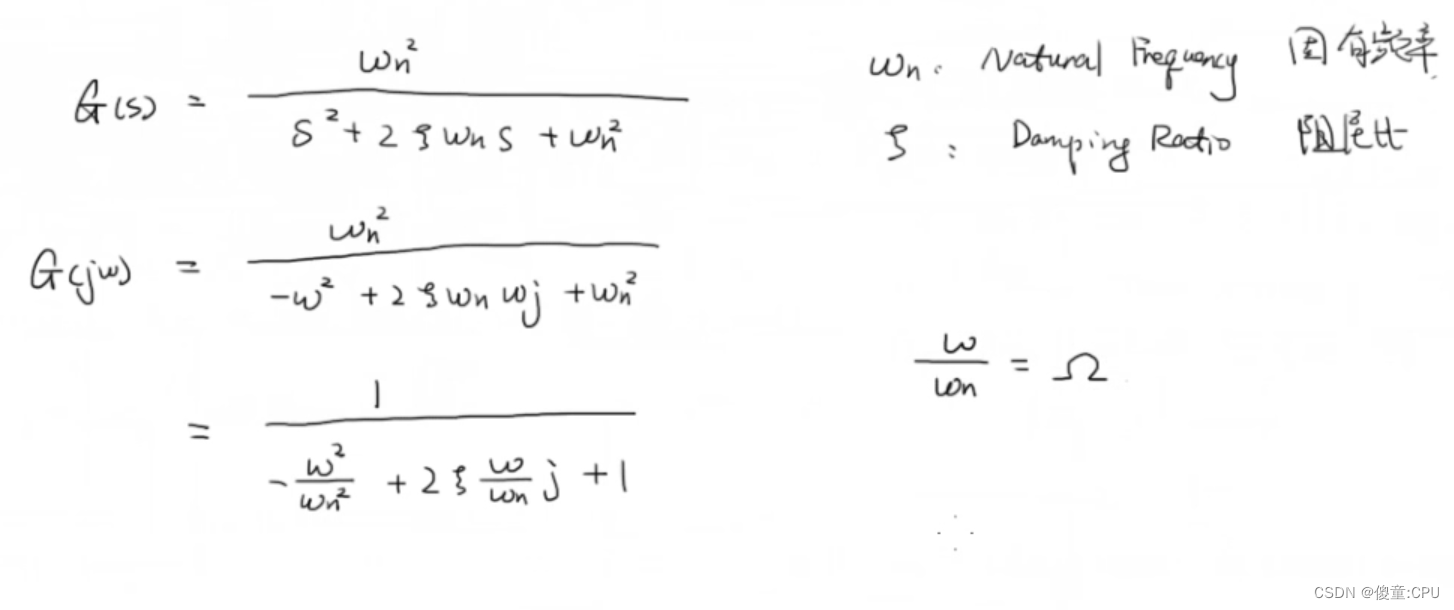
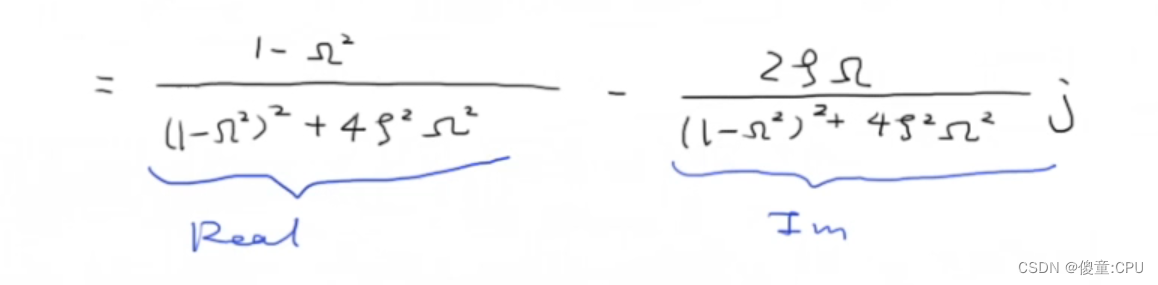
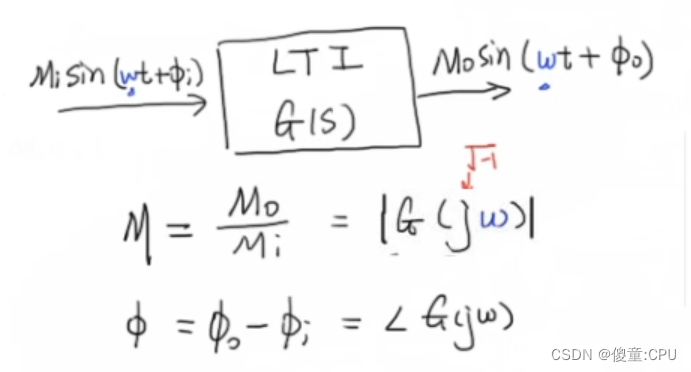
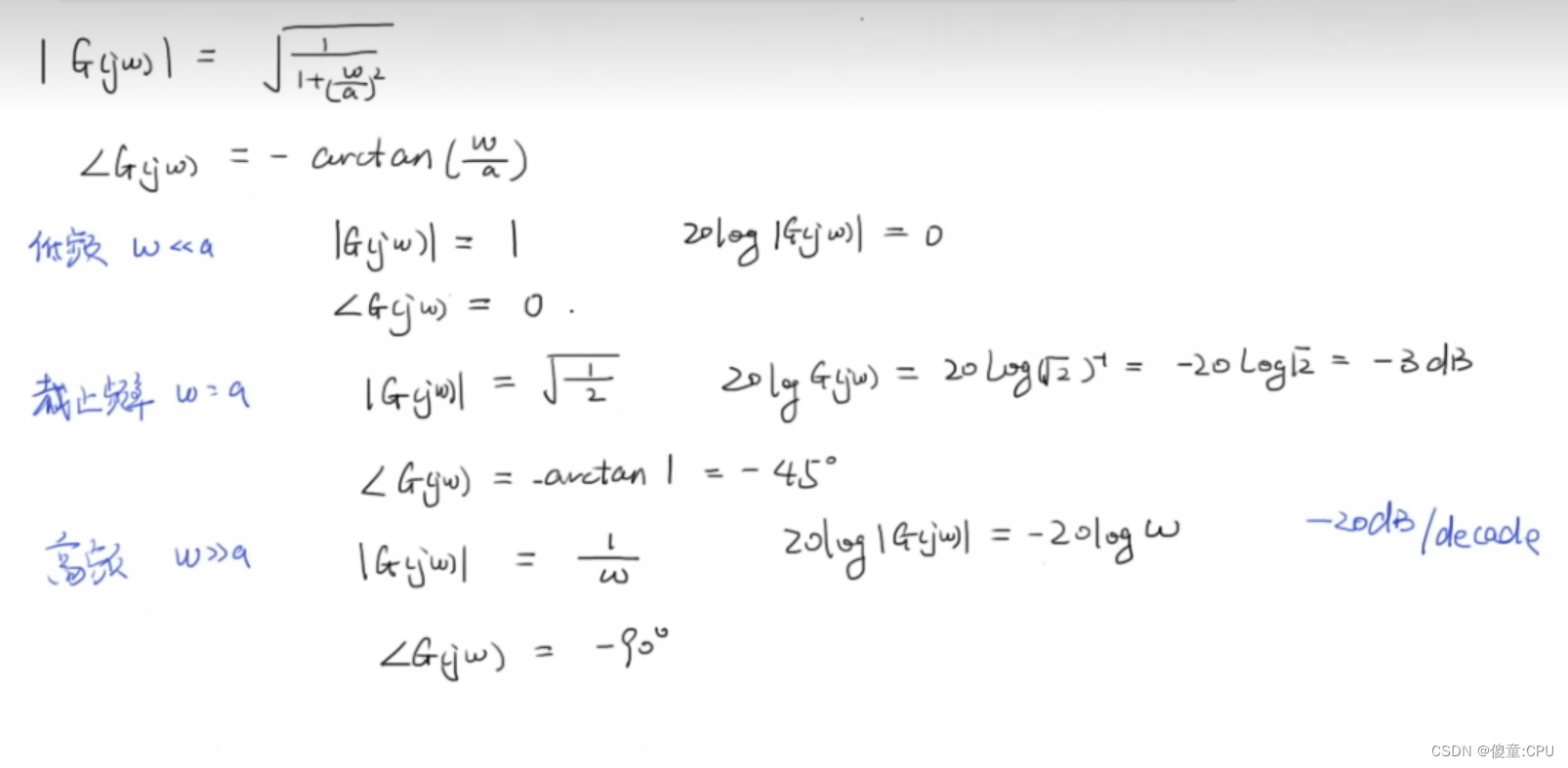
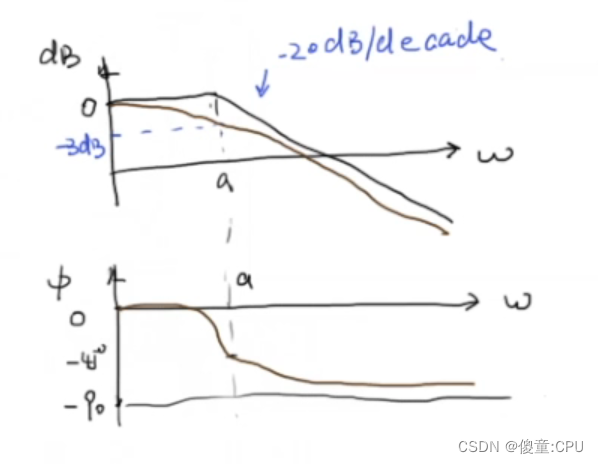
频率响应与滤波器
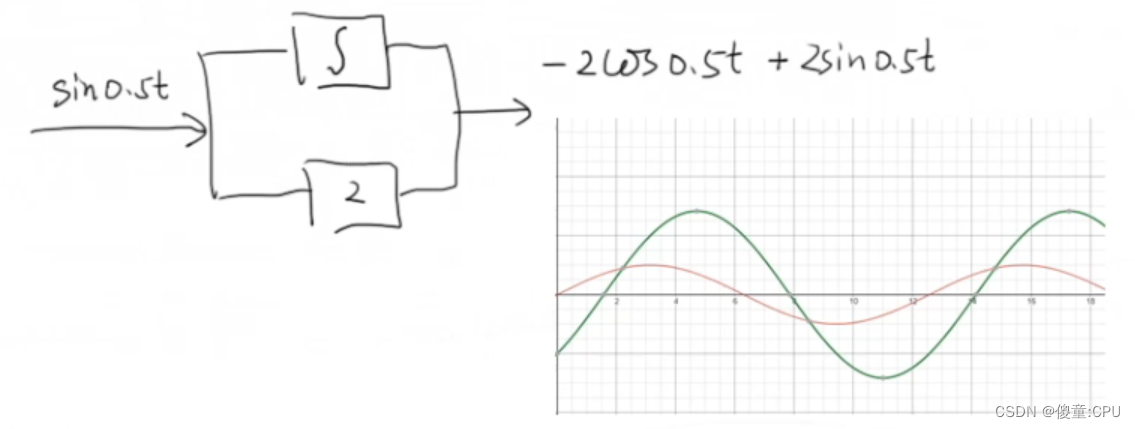
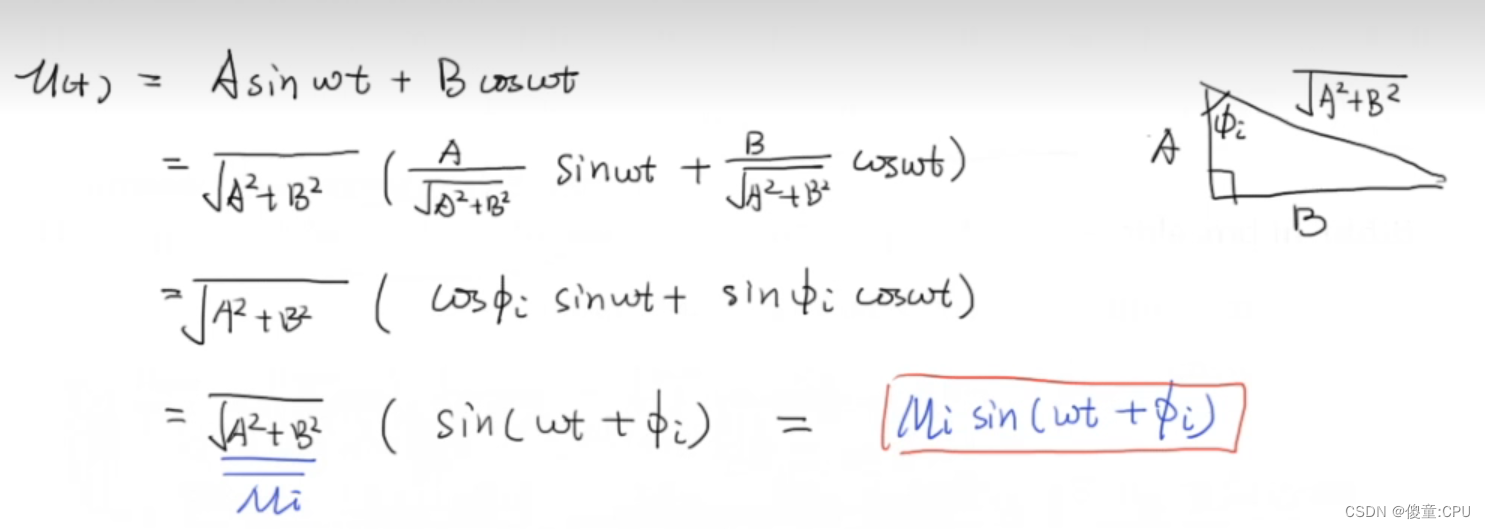
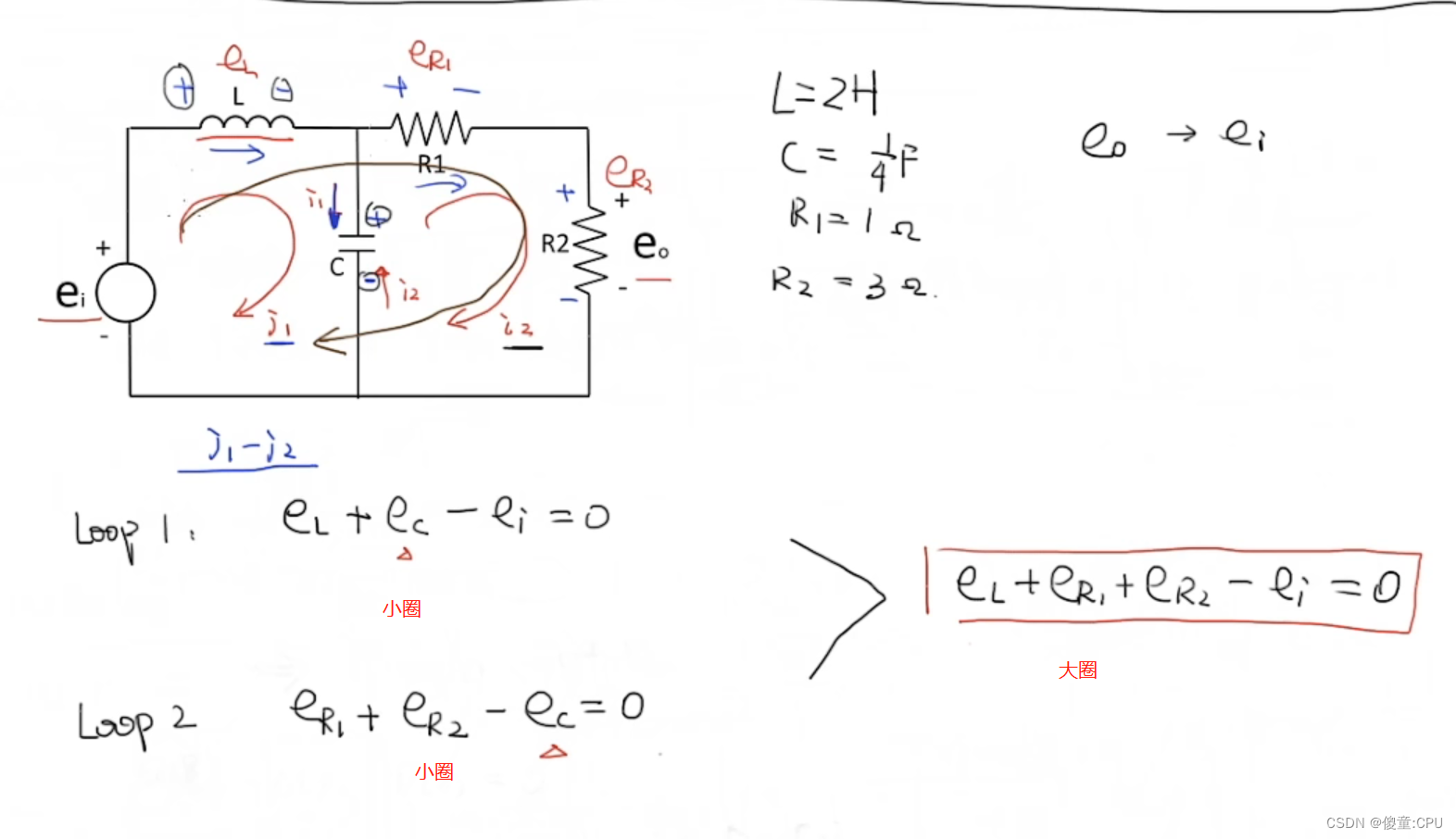
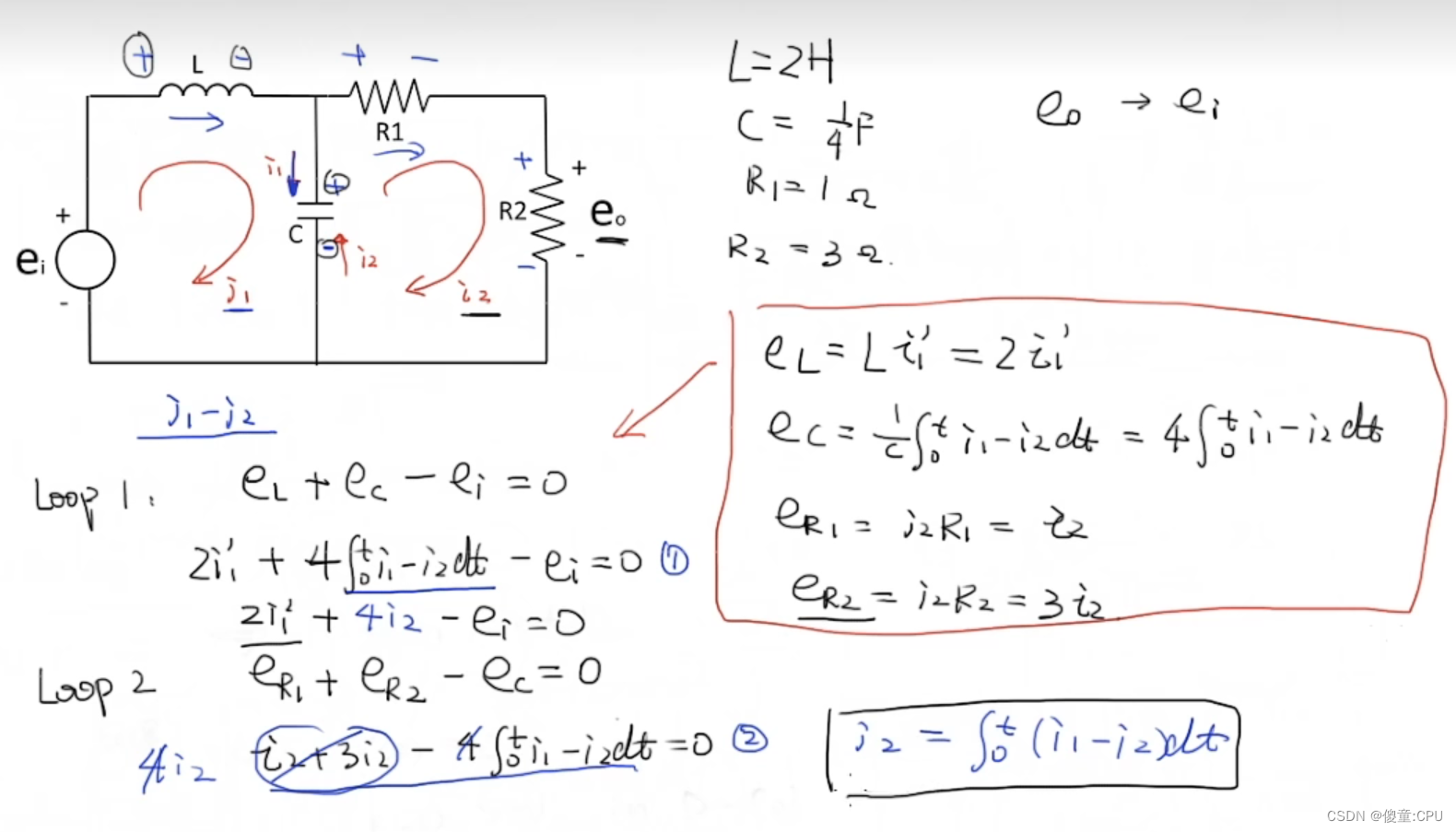
例子
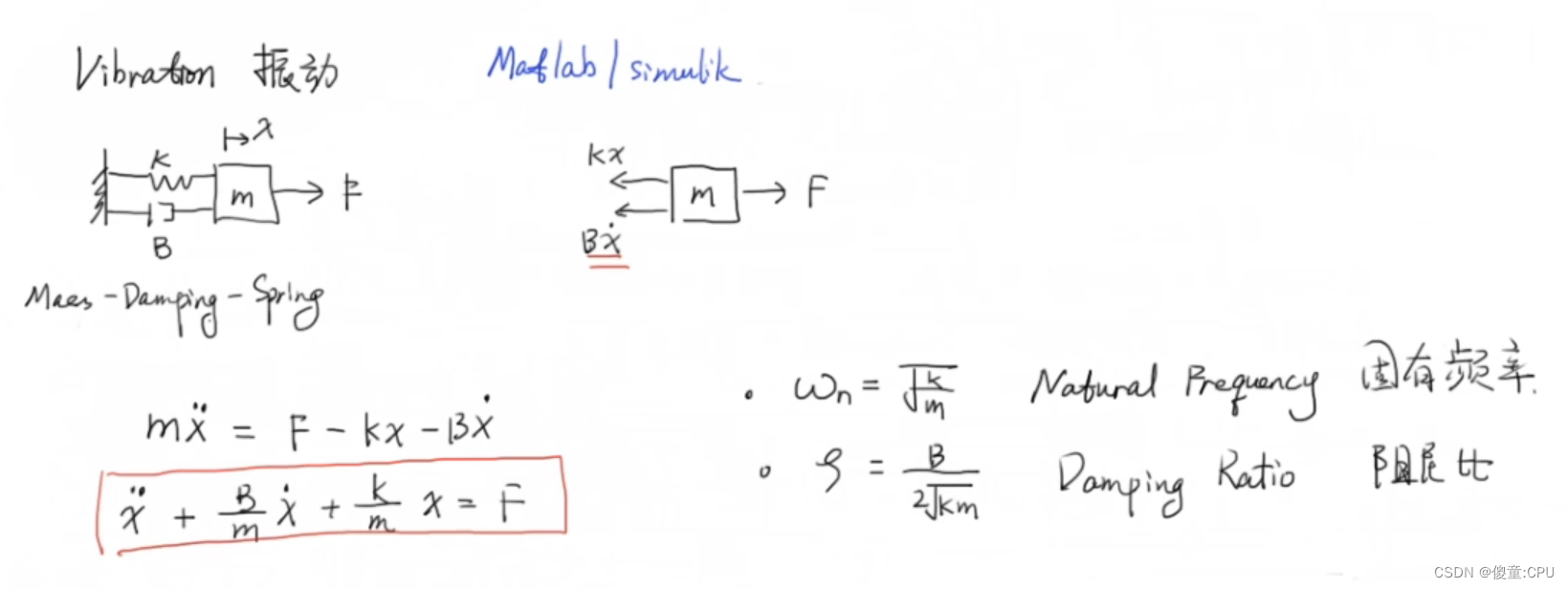
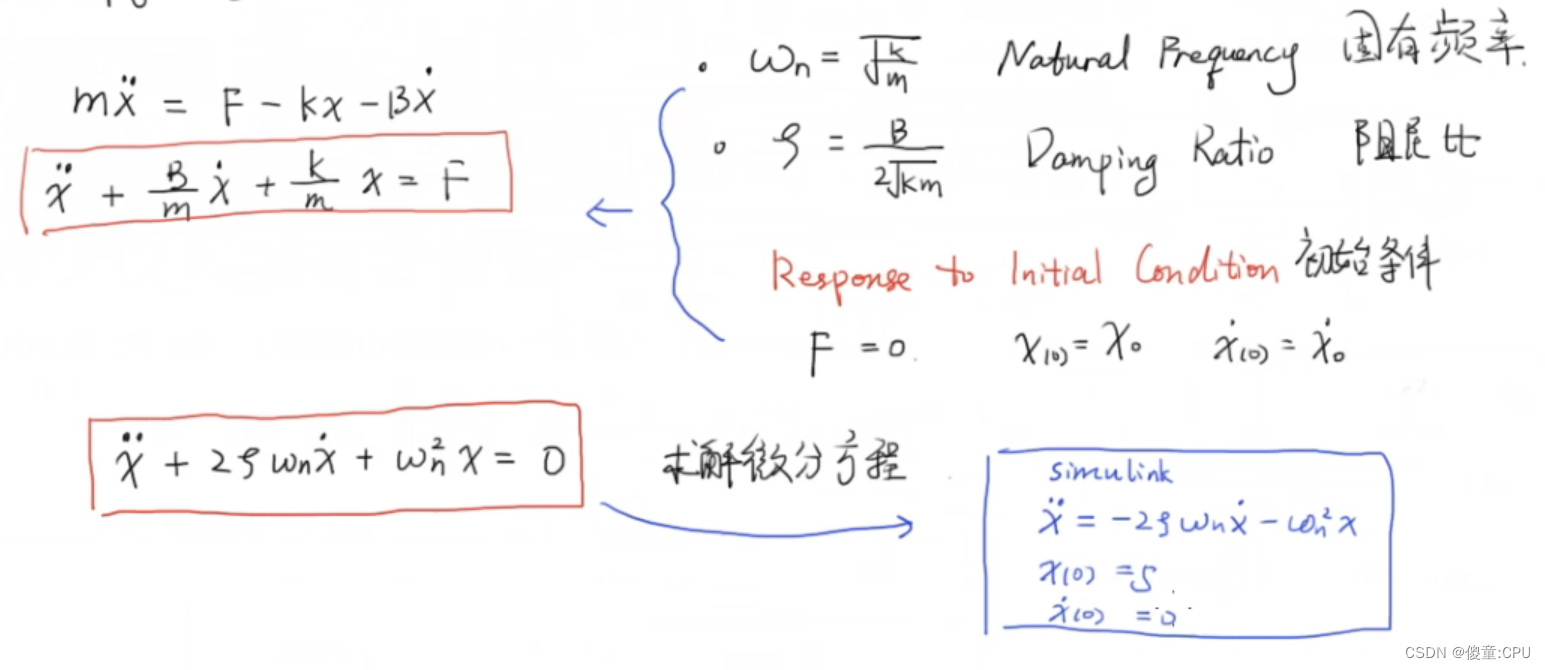
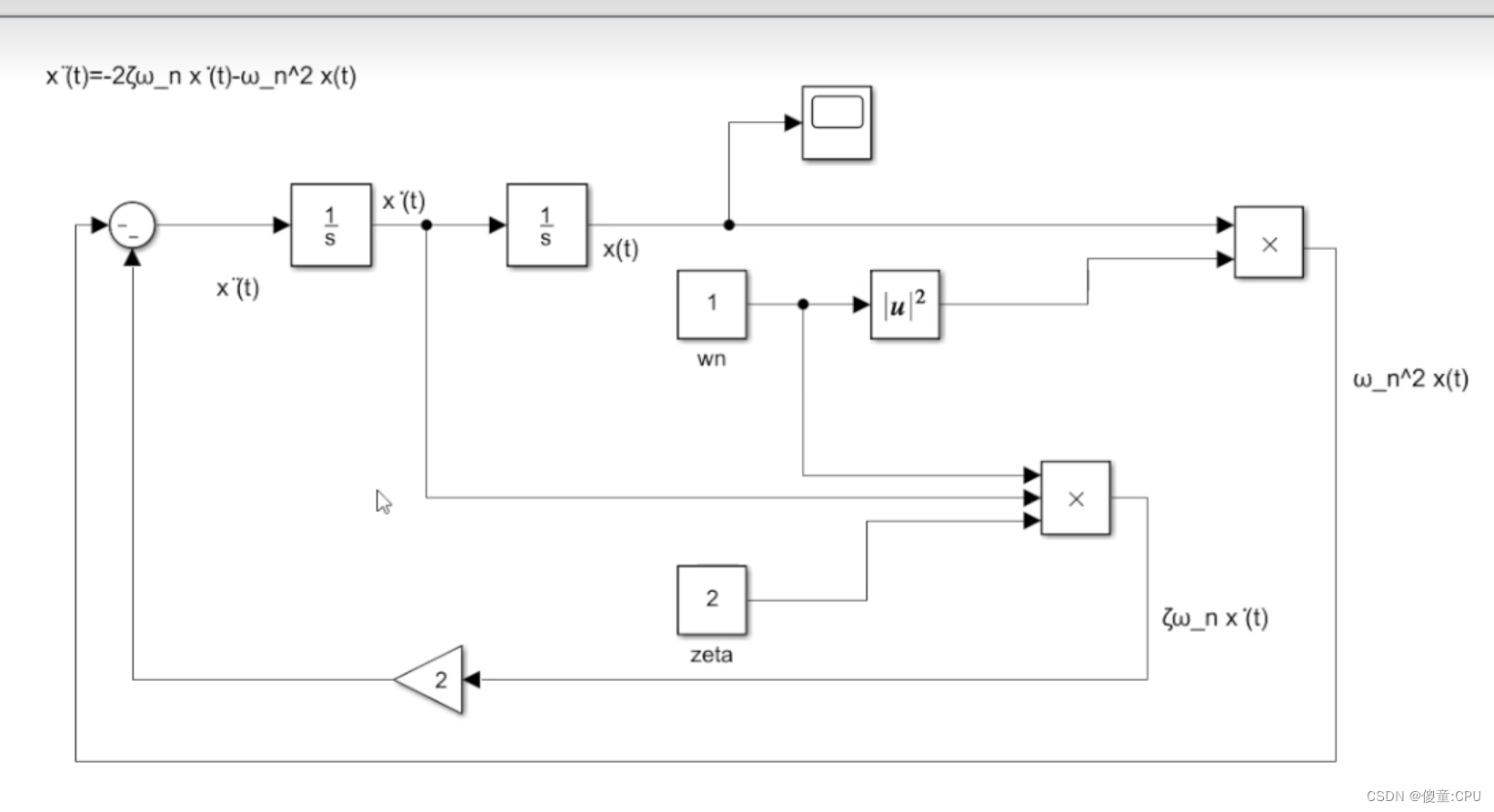
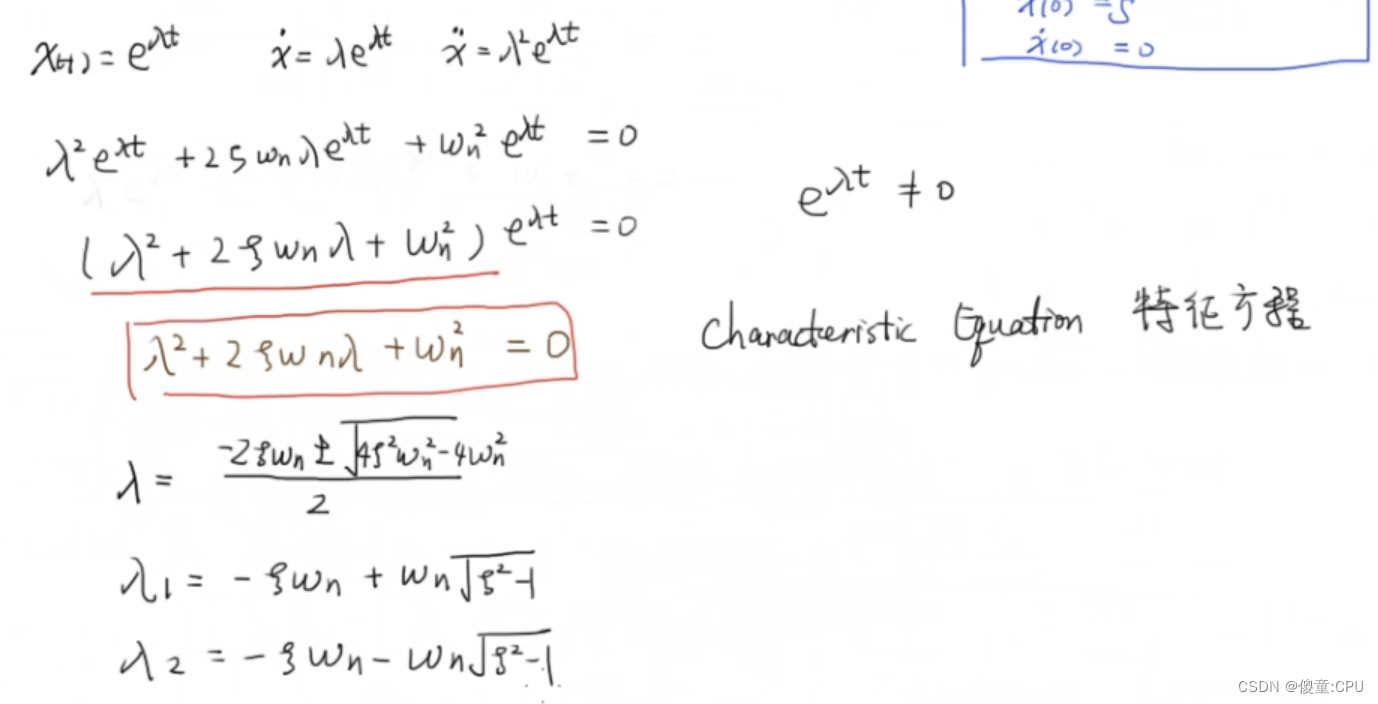
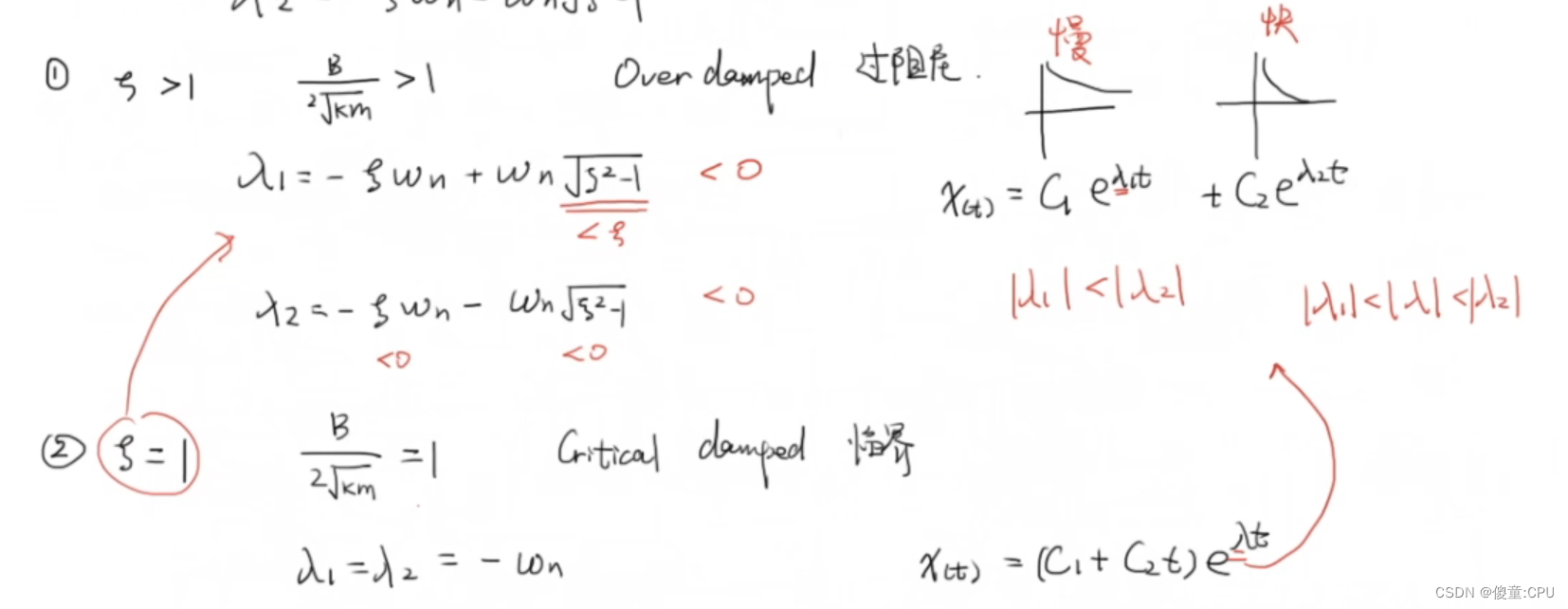
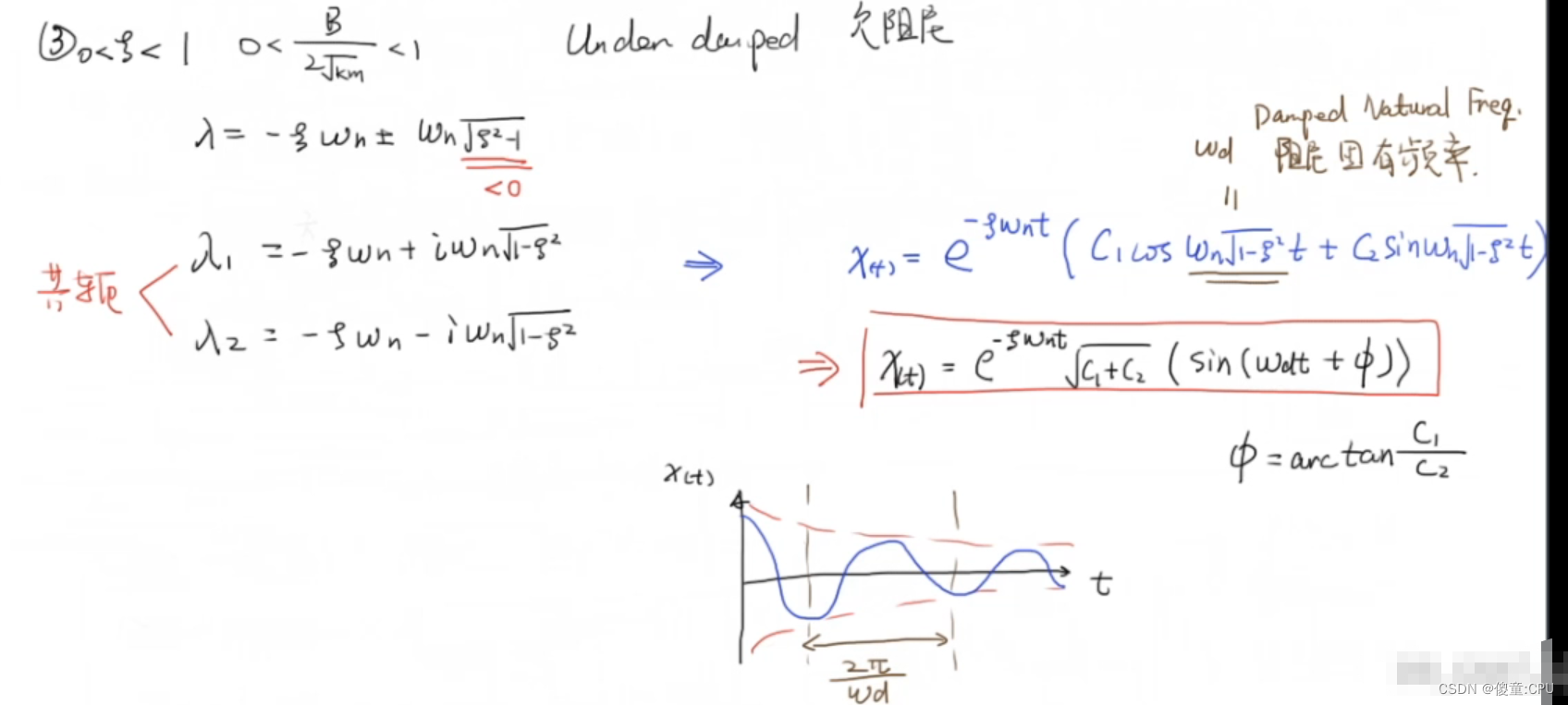
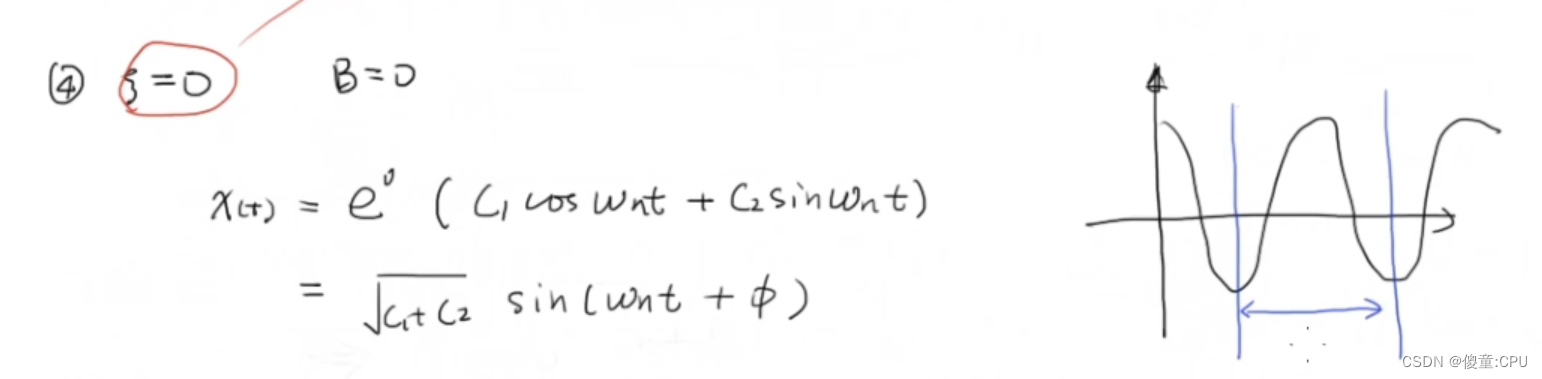
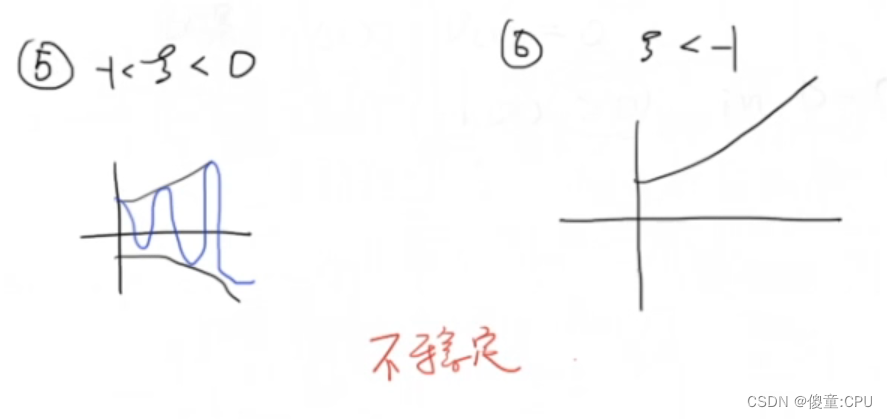
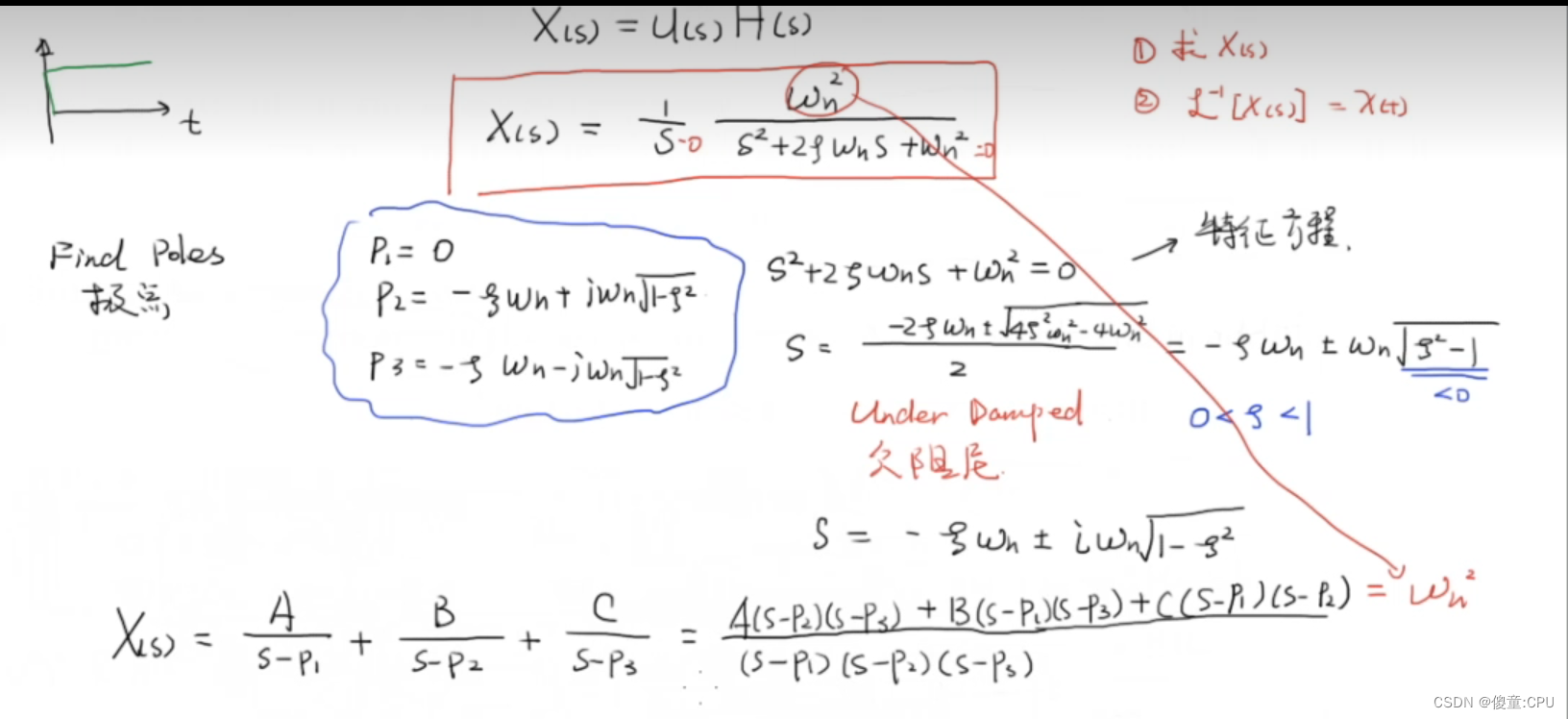
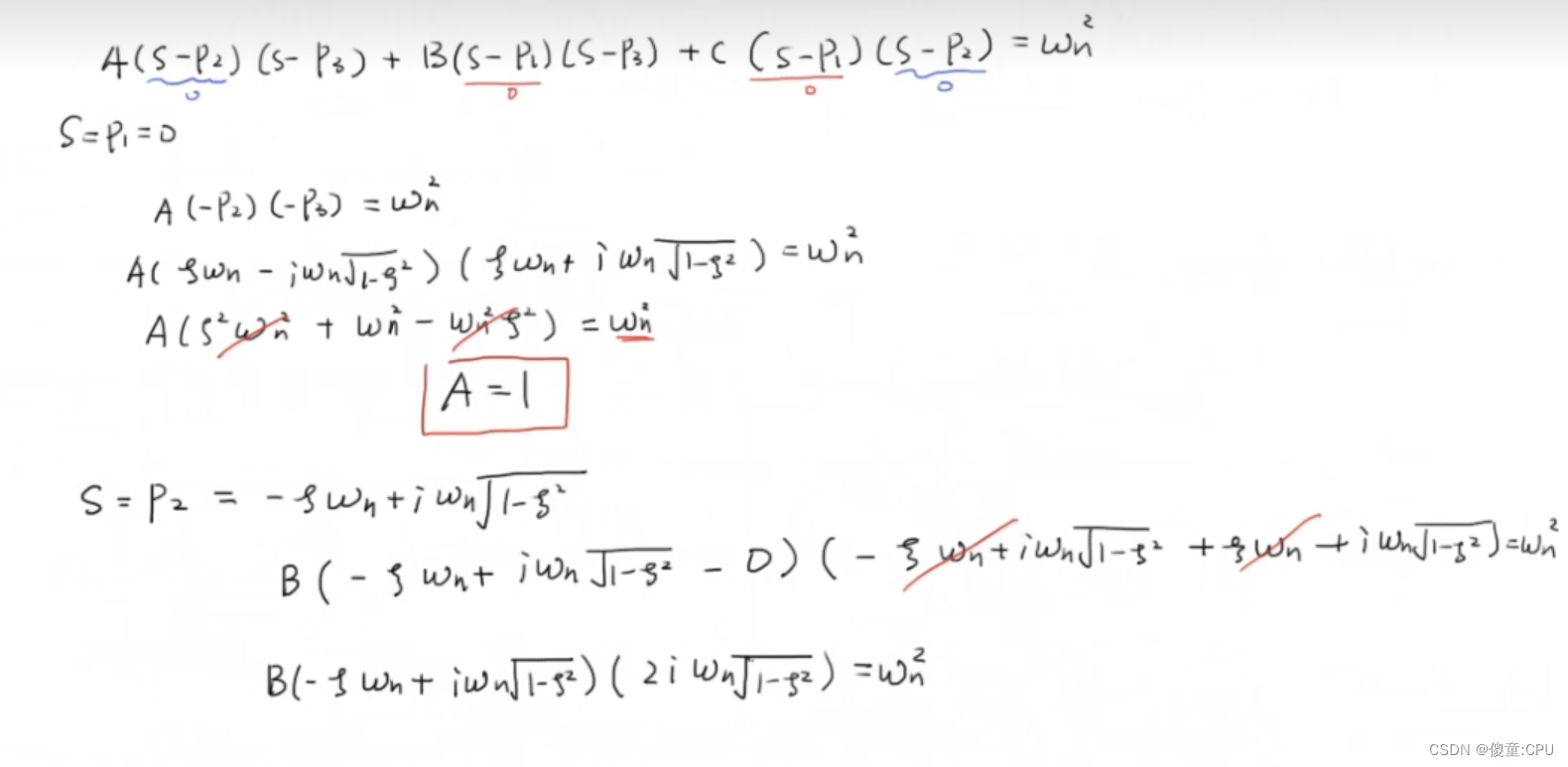
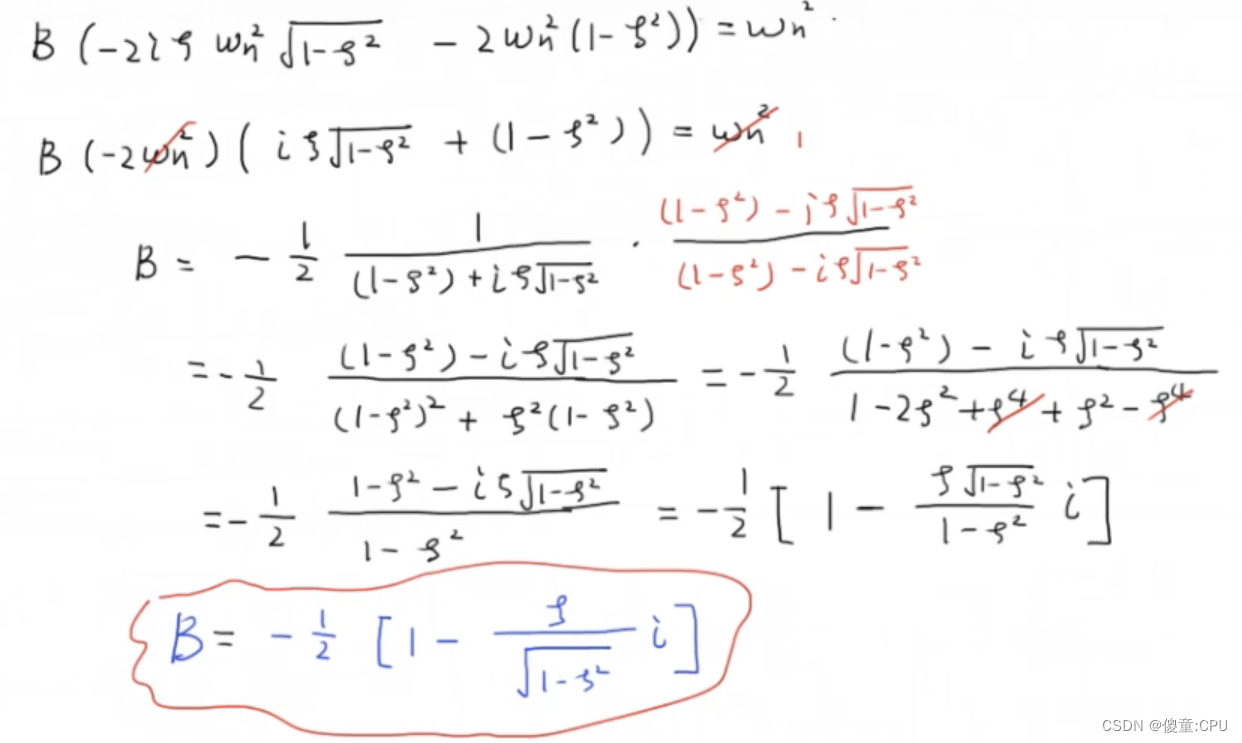
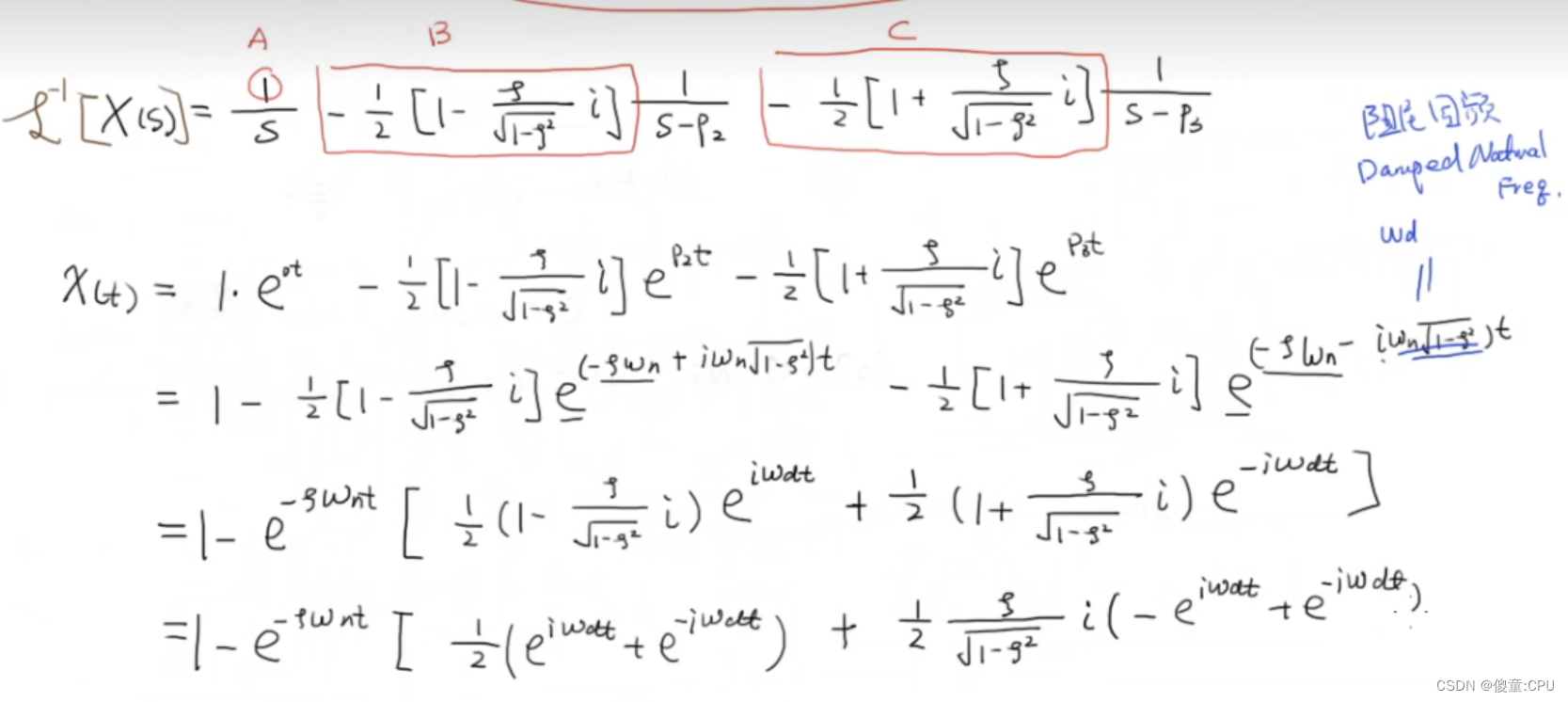
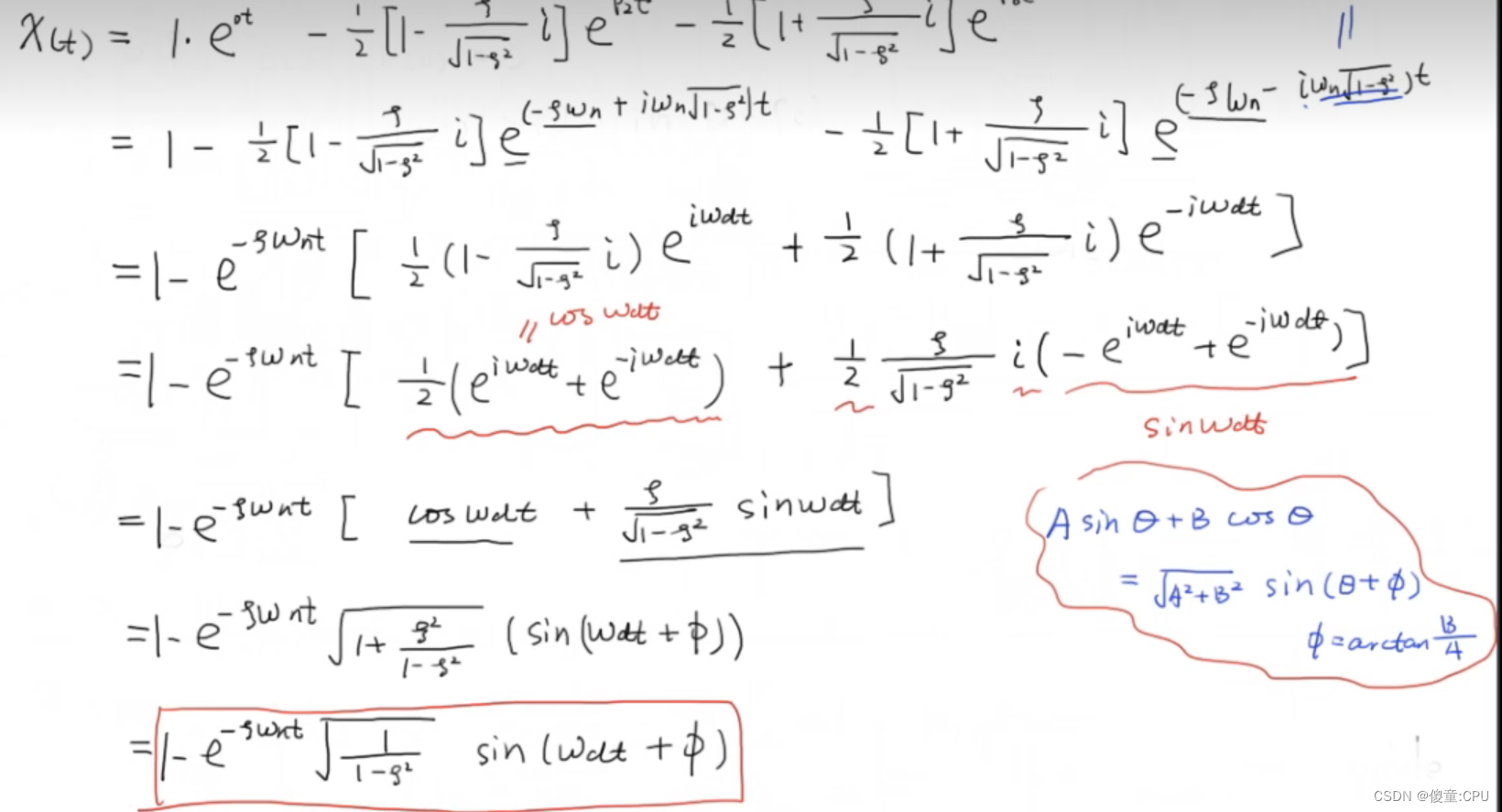
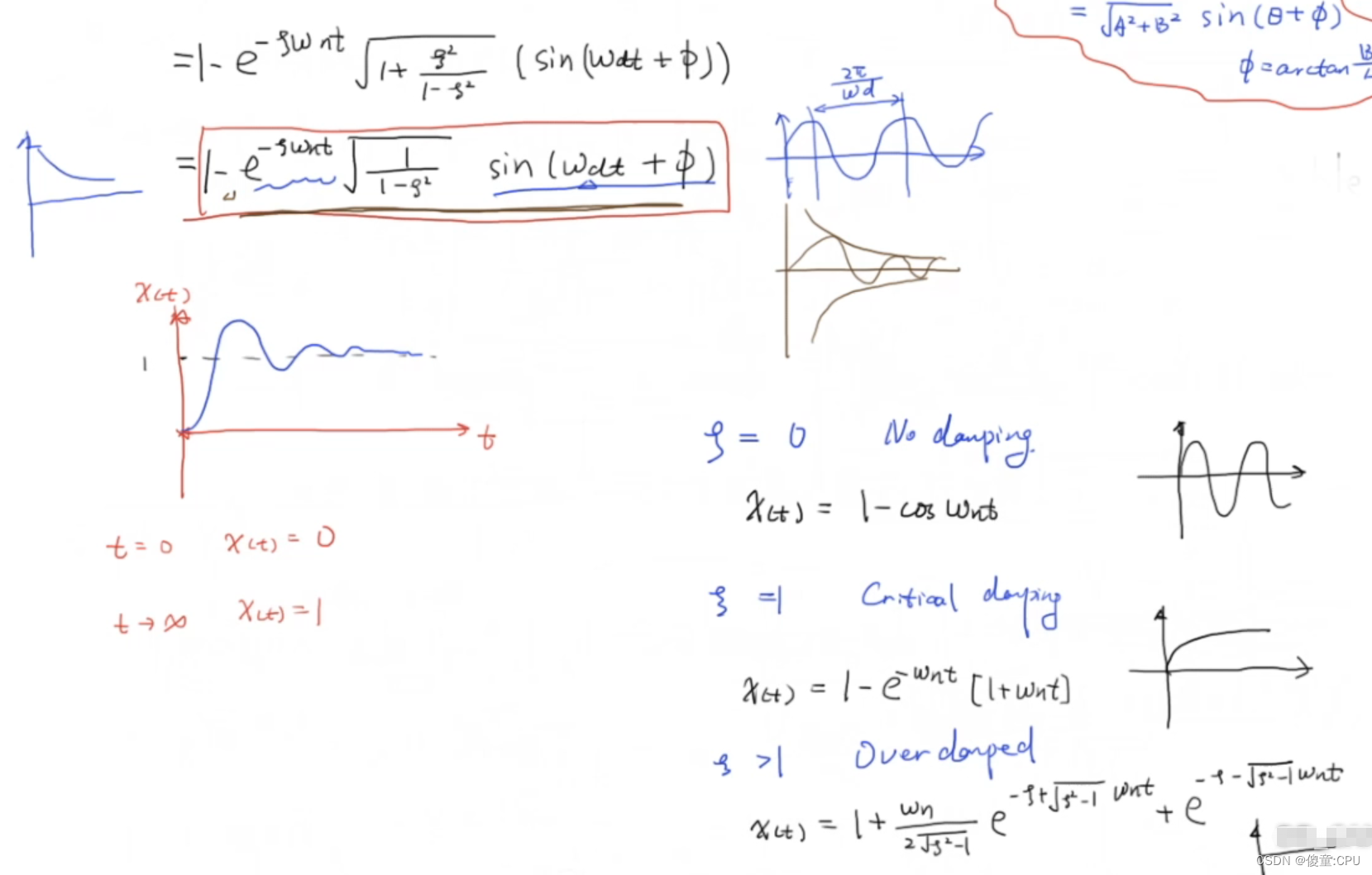
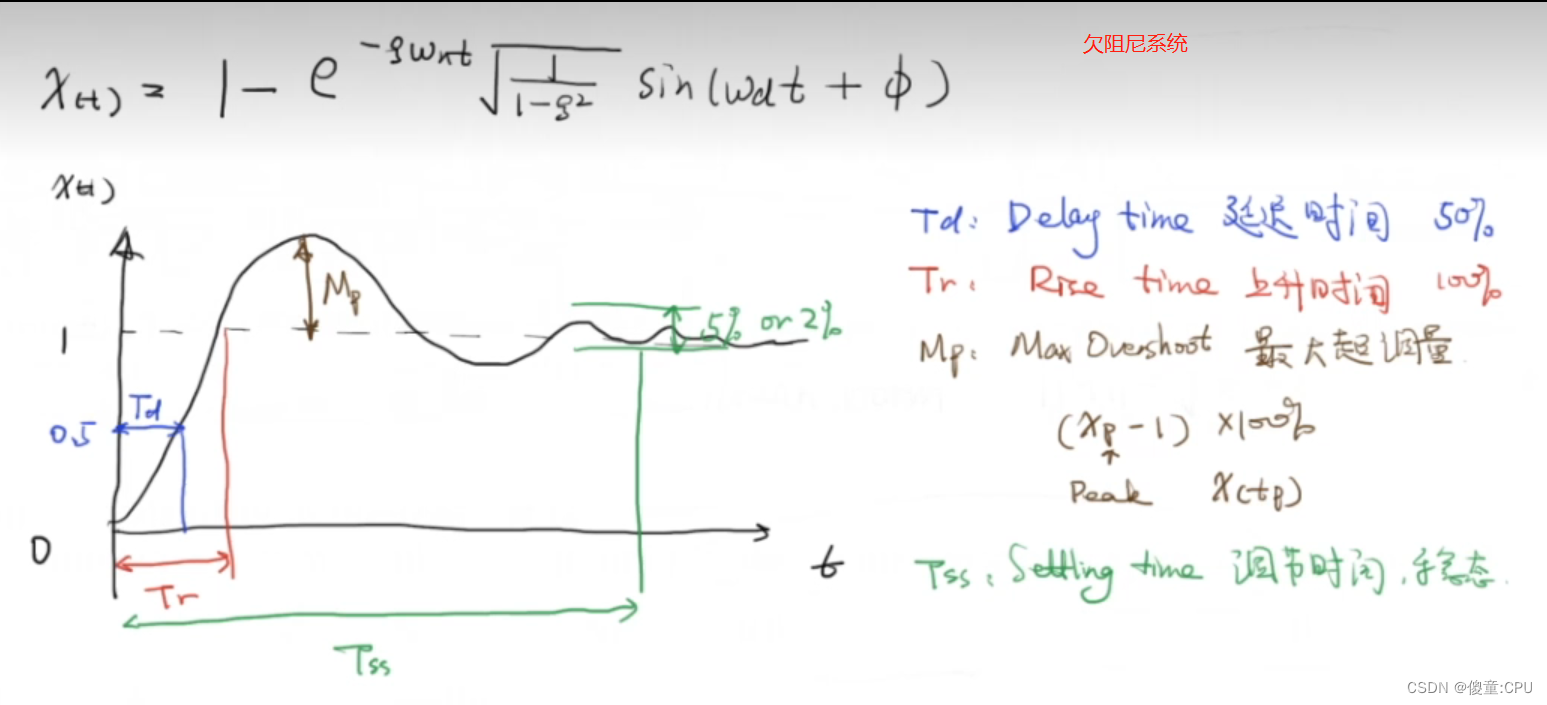
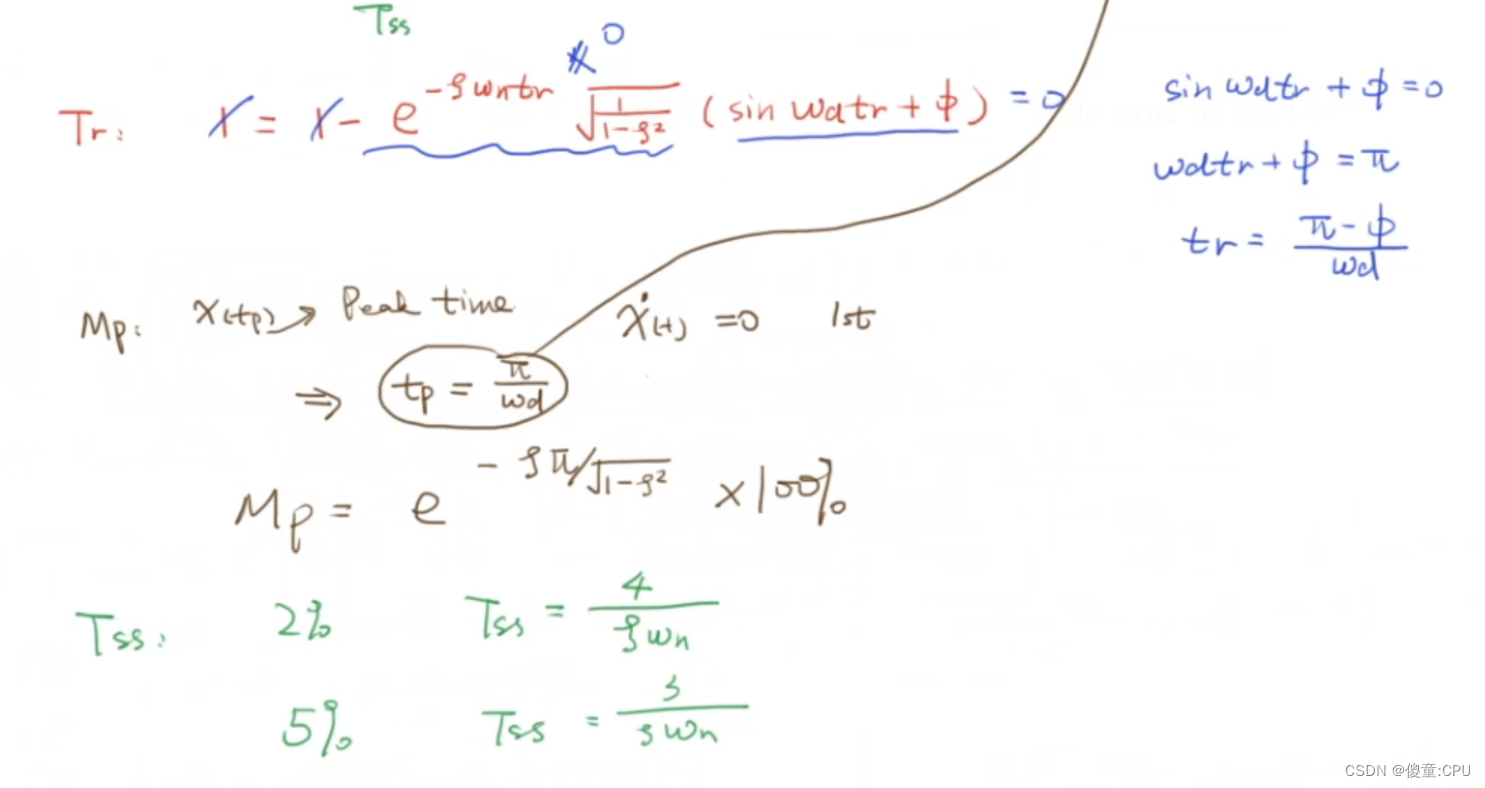
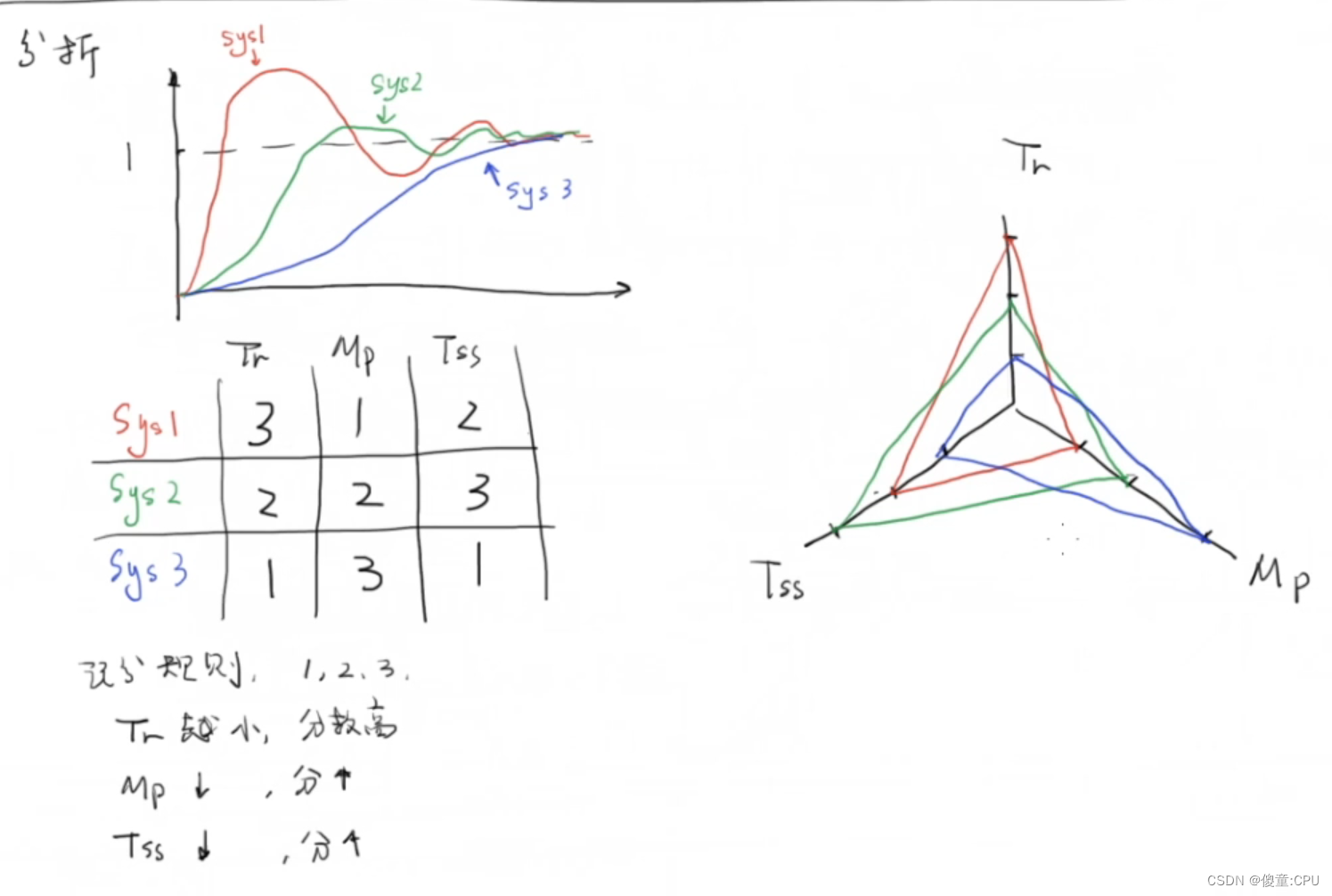
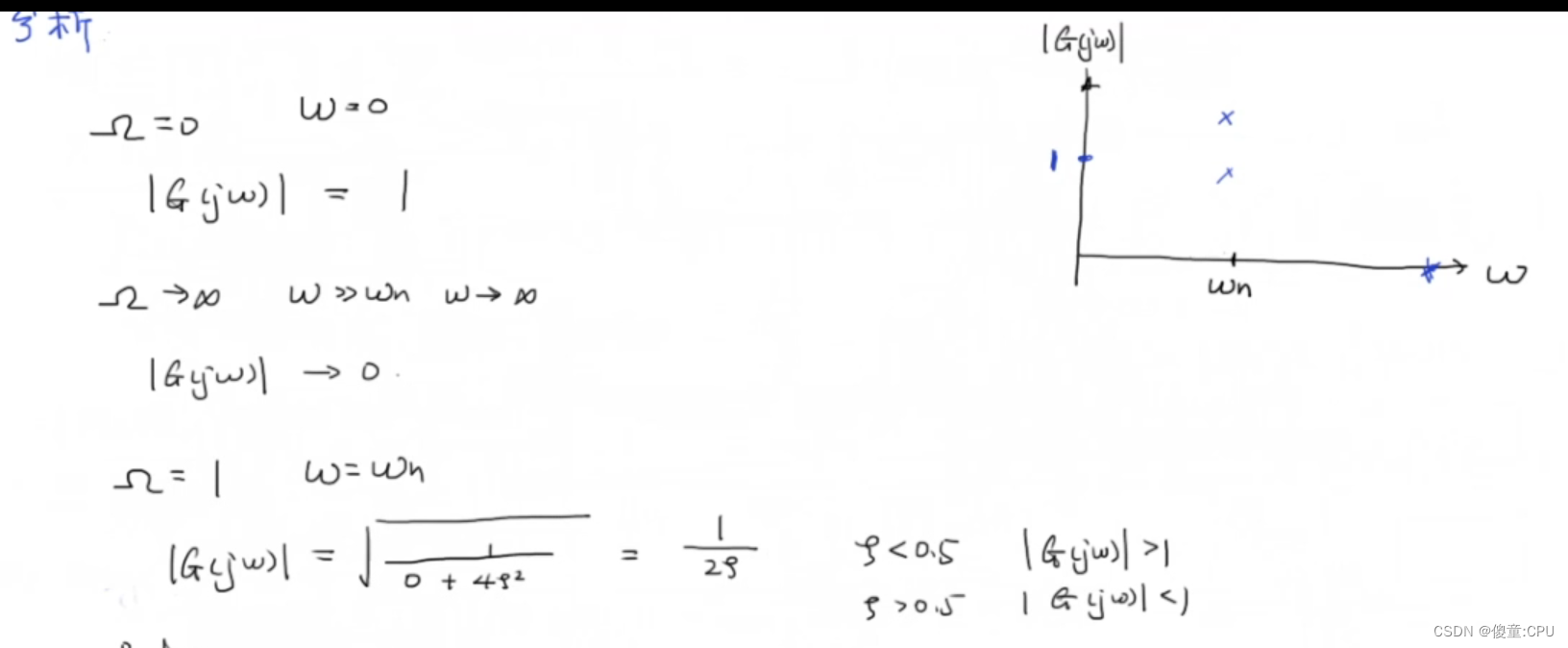
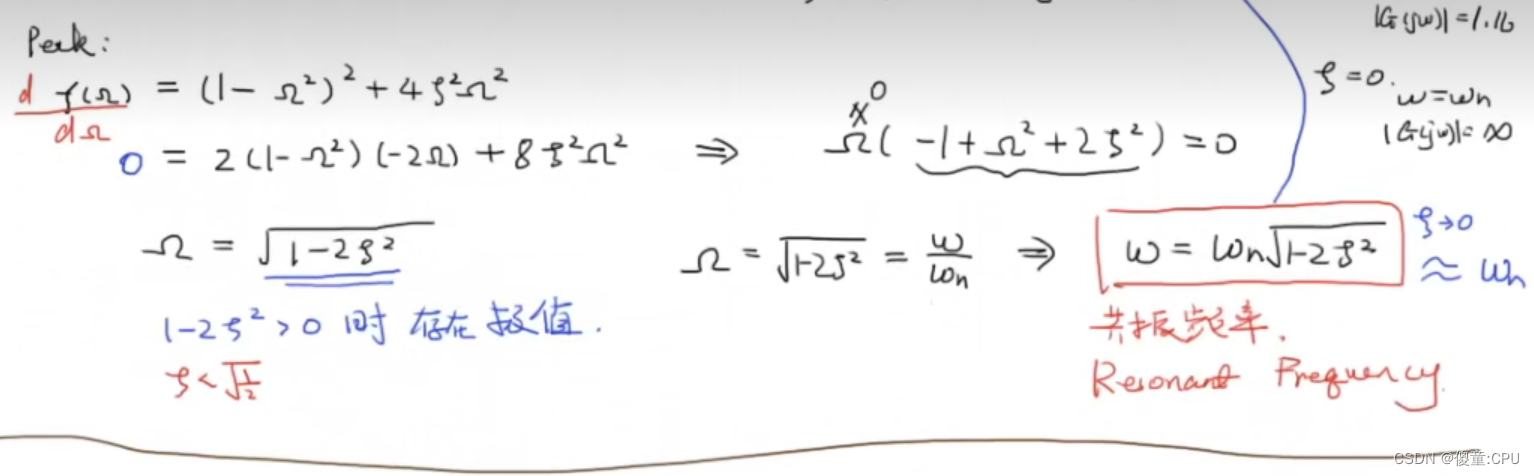
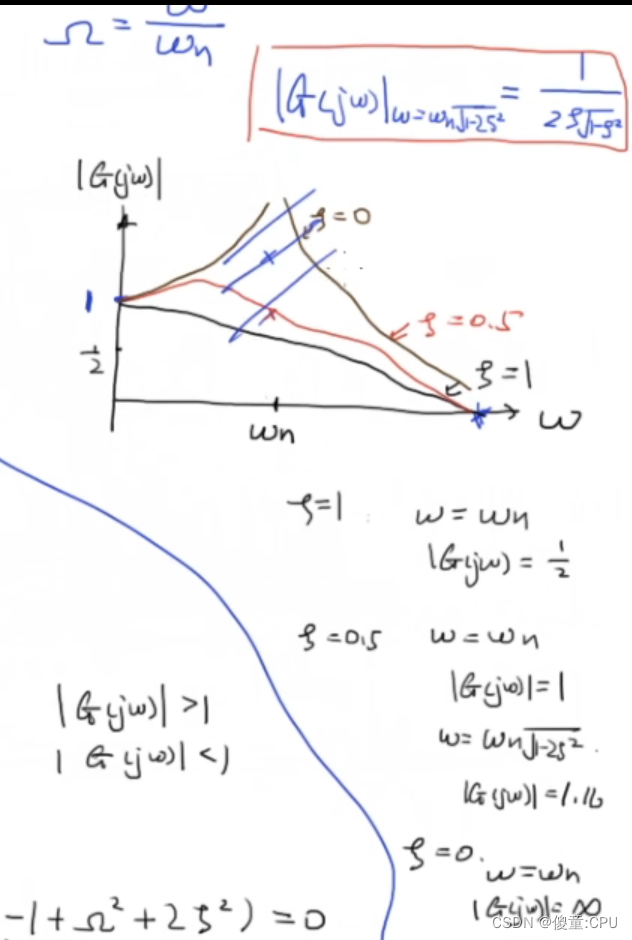
二阶系统的动态响应

科学的分析方法


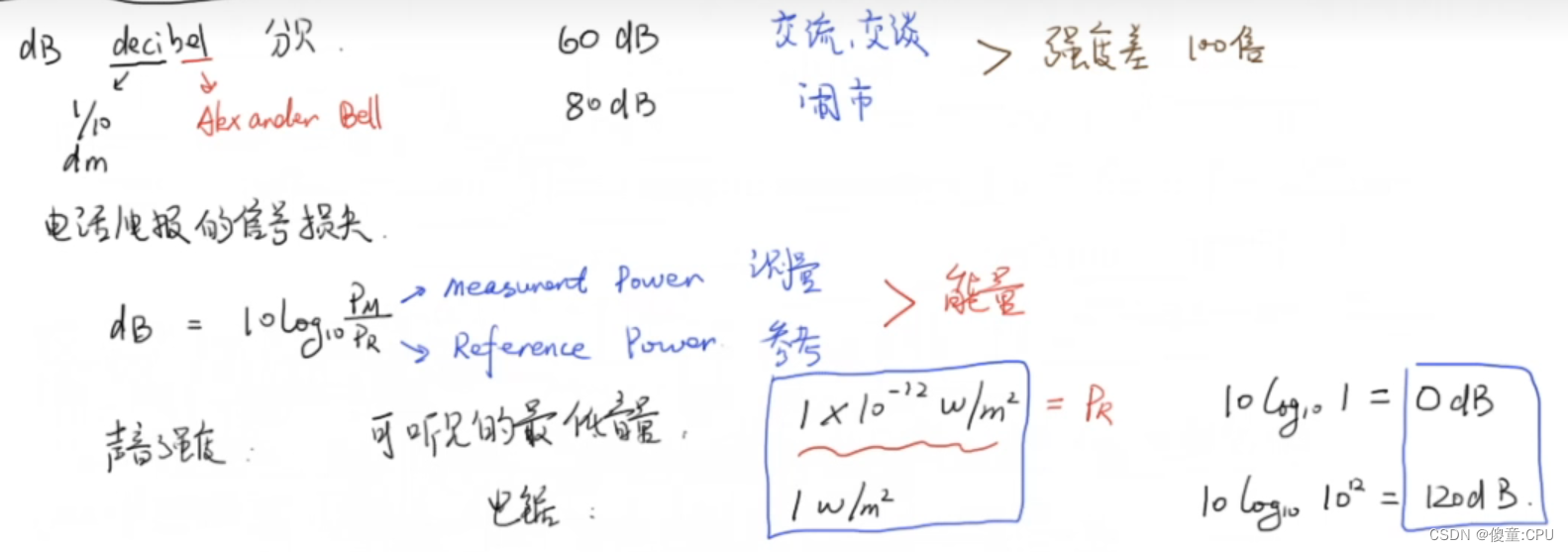
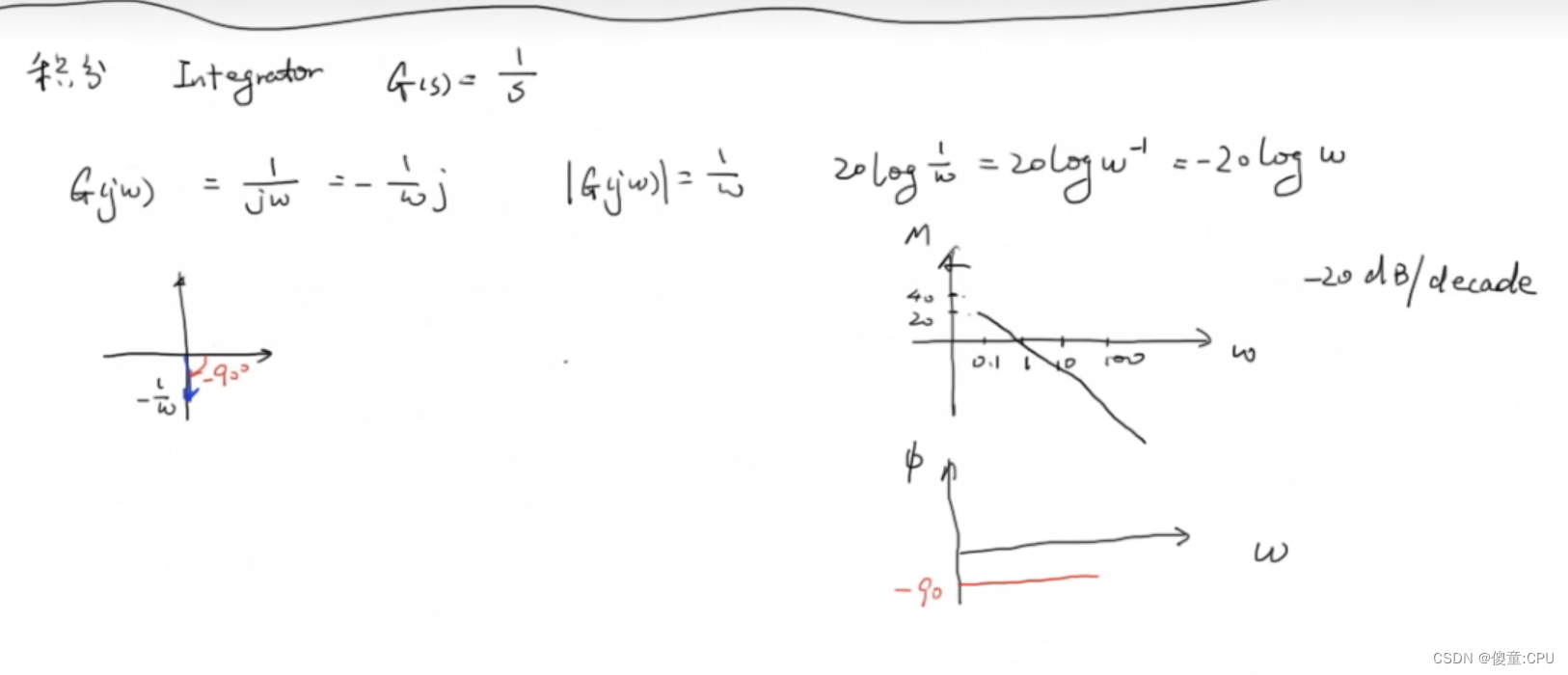
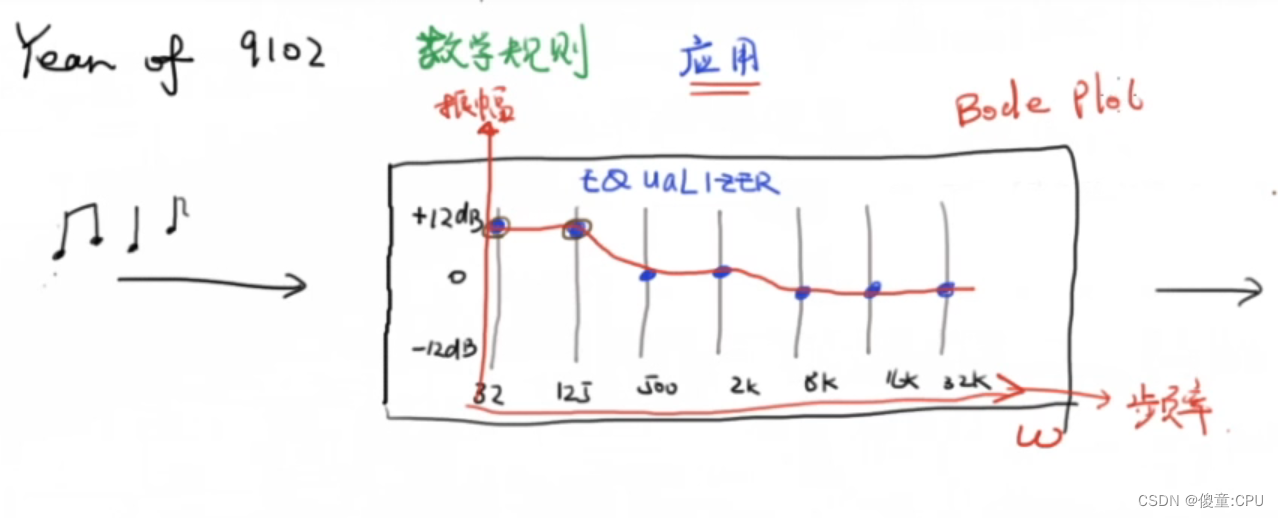
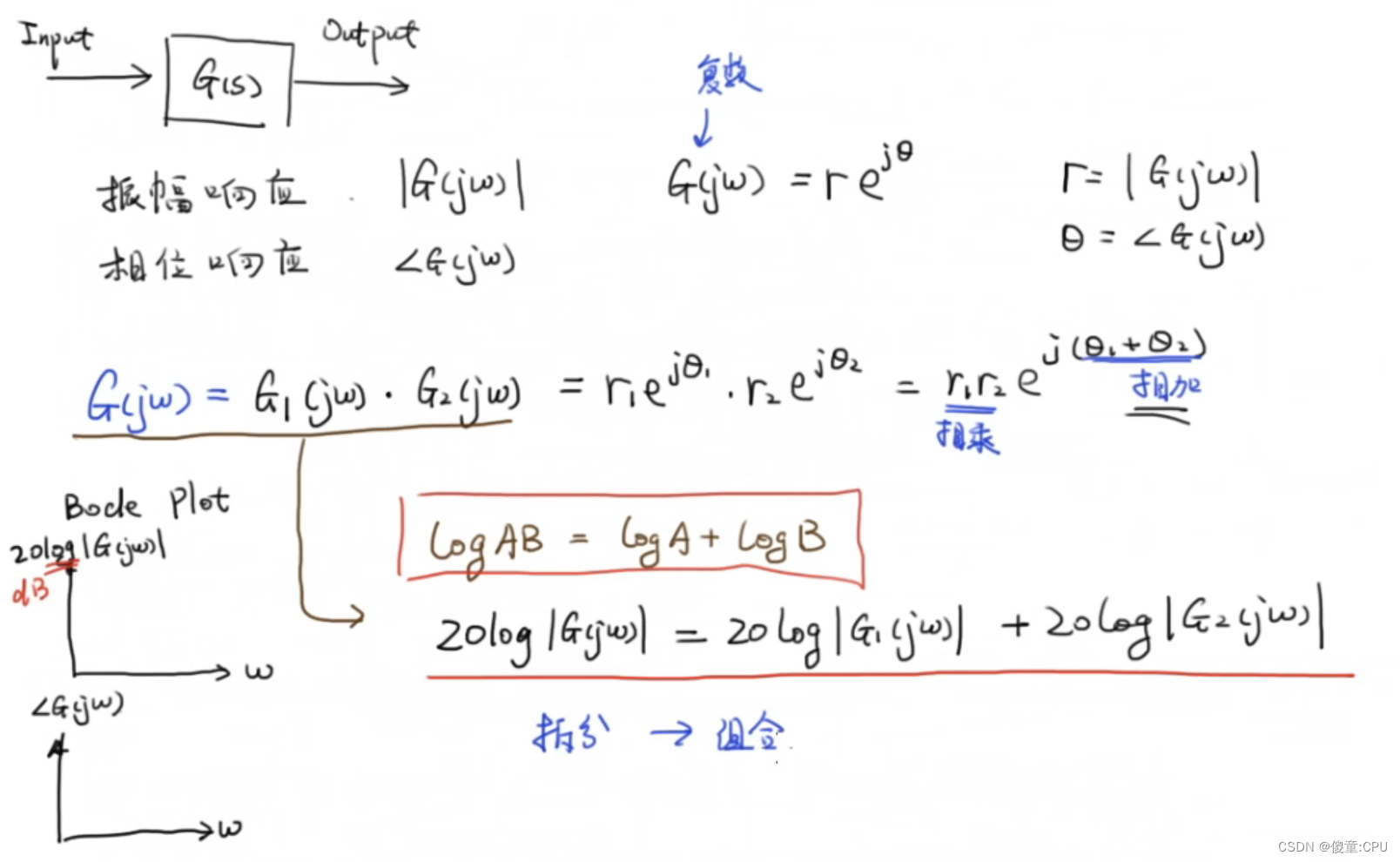
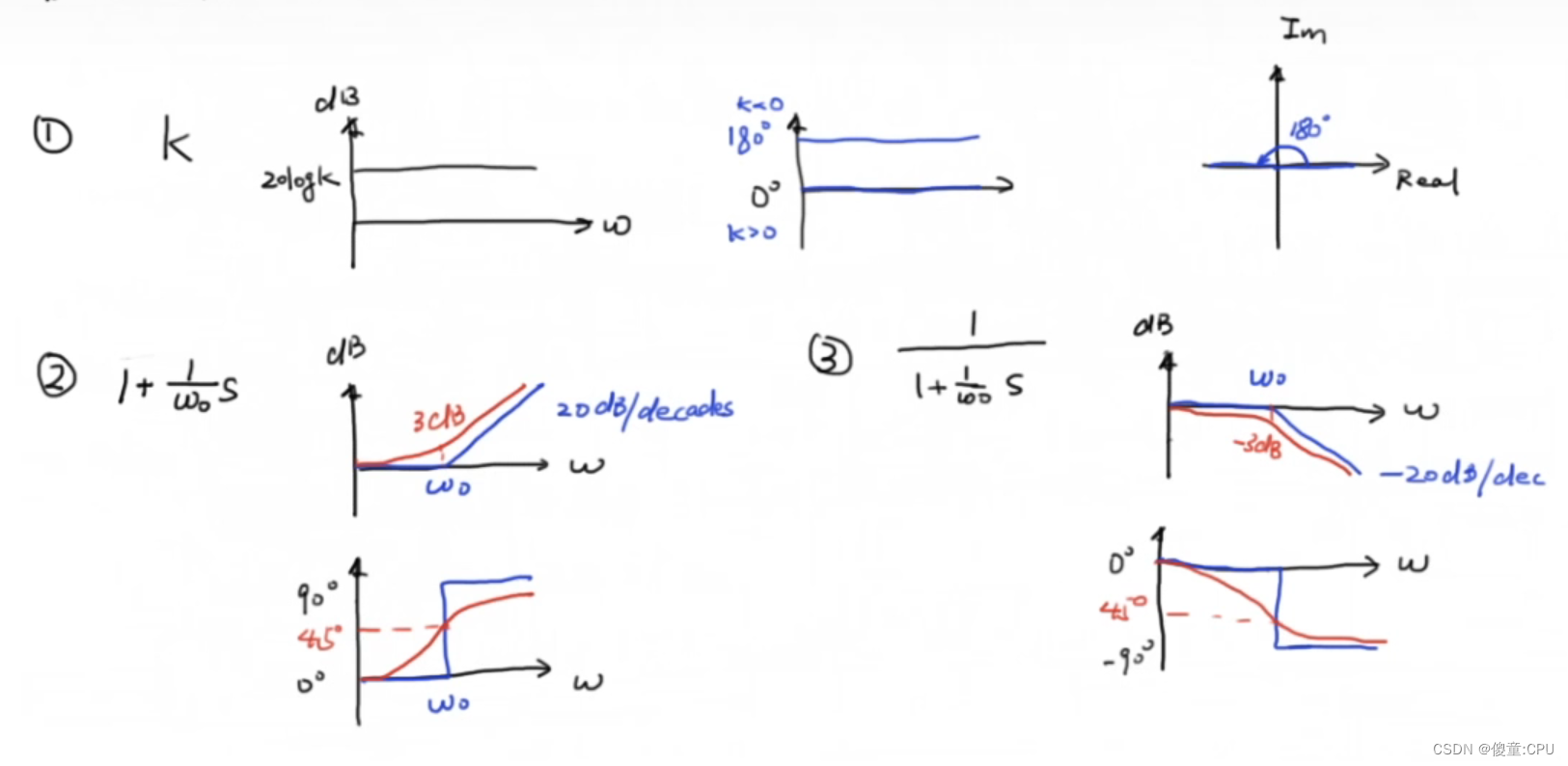
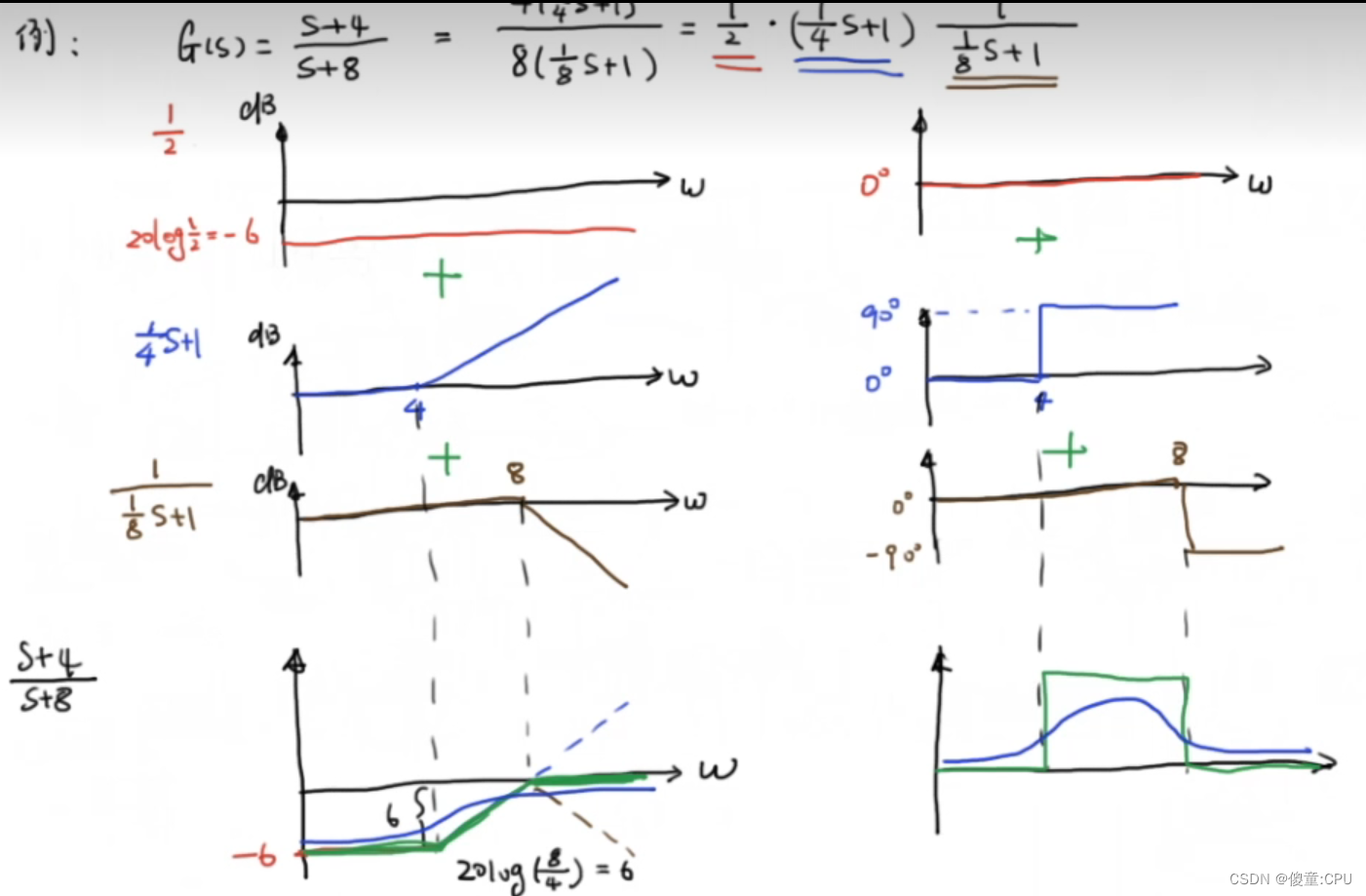
伯德图
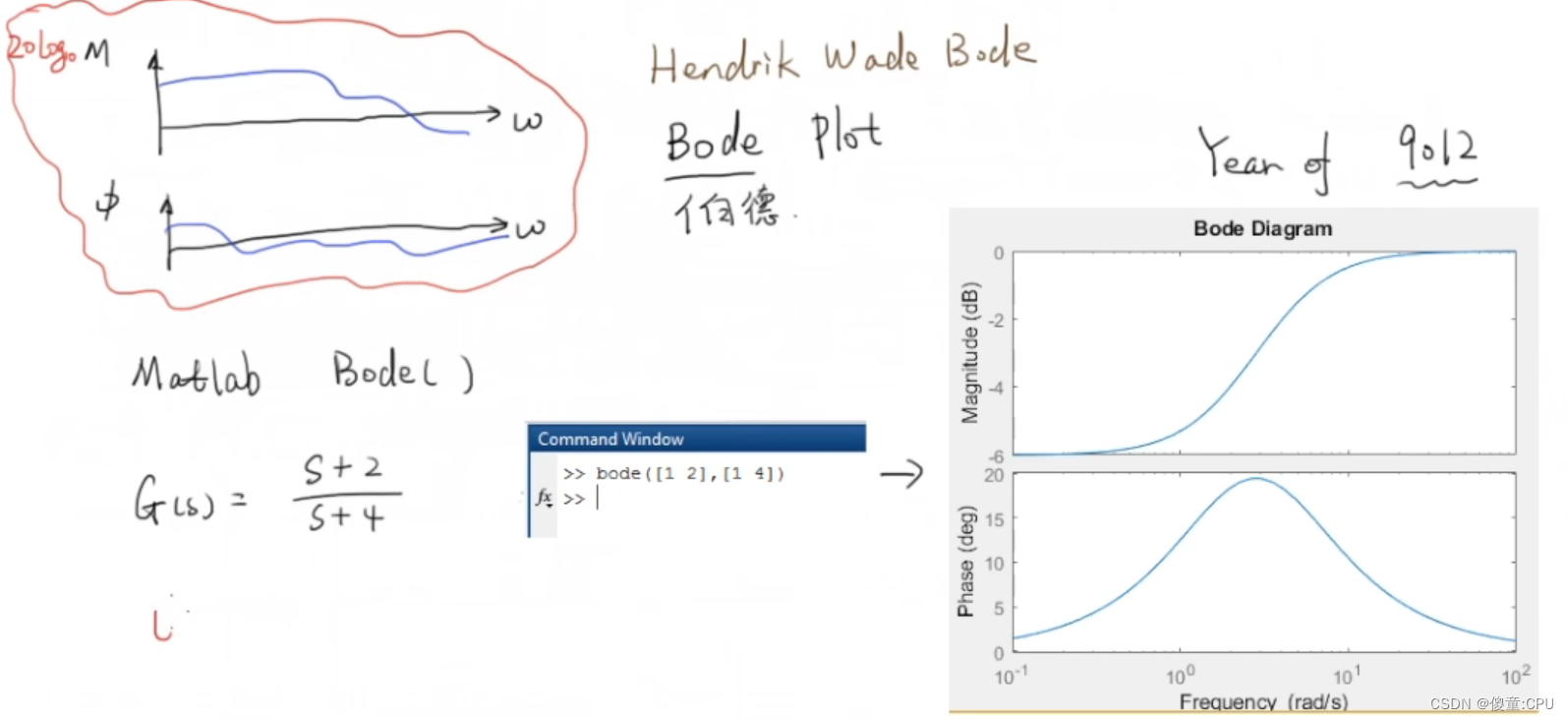

例子
相关文章
- Java项目毕业设计:基于springboot+vue的电影视频网站系统「建议收藏」
- 初赛直播 | 2022 CSMS中国仿真学会复杂系统仿真建模大赛初赛入围名单及观赛报名入口
- 3D建模大神都在用的学习技巧!
- 深入理解推荐系统:如何多种业务场景合并建模
- 人脸识别系统如何建模_3dmax人脸建模
- 结构建模设计——Solidworks软件之绘制一个手机支架模型,使用3D打印技术输出实物的全流程实战
- AI自动识别户型图生成数据建模解决方案
- R语言分布滞后非线性模型(DLNM)空气污染研究温度对死亡率影响建模应用|附代码数据
- 多目标建模总结
- 生态学建模:增强回归树(BRT)预测短鳍鳗生存分布和影响因素|附代码数据
- 犀牛3d建模哪个版本好?Rhino犀牛7.4中文版下载和安装使用教程
- amos软件是干嘛的?结构方程建模amos软件新版,amos下载安装教程
- MDI Jade药物分子建模软件激活版电脑下载安装,MDI Jade软件下载
- Mysql建模:从入门到精通的教程(mysql建模教程)