

相关文章
- [Linux]控制语句If case
- Win10系列:VC++媒体播放控制2
- KubeVela 为 CNCF 孵化器带来软件交付控制平面能力
- 移动机器人路径跟踪的设计和仿真模型预测控制(Matlab代码实现)
- 【多旋翼无人机】非对称多旋翼无人机线性控制的建模、仿真与实现【多旋翼无人机的设计、开发、建模与仿真,比例积分微分控制、线性二次高斯控制和模型预测控制等控制方案】(Matlab代码实现)
- 【蓝桥杯单片机组第六届模拟题】— “简易温度采集与控制装置”设计任务书
- 云服务过载控制的前世今生
- 前、后端分离权限控制设计与实现
- kubernetes安全机制--Admission Control准入控制
- LabVIEW无刷直流电机正弦控制查表
- LabVIEW编程LabVIEW控制NI cRIO-9066例程与相关资料
- LabVIEW编程LabVIEW开发 控制雷赛运动控制器SMC604A例程与相关资料
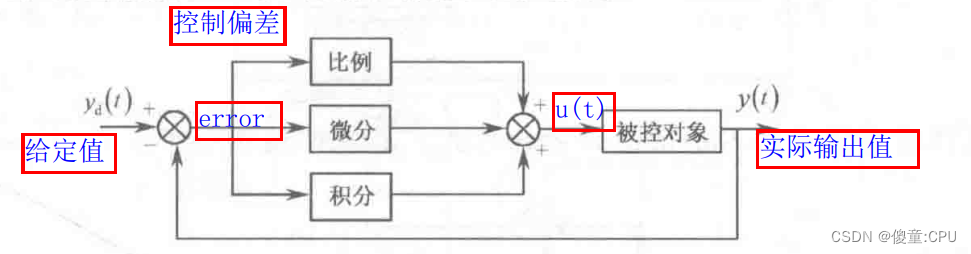
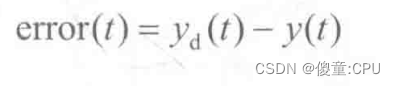
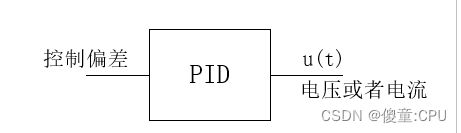
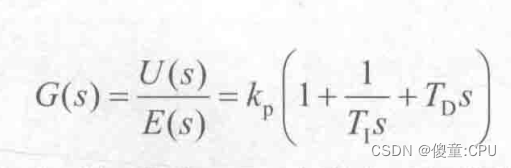
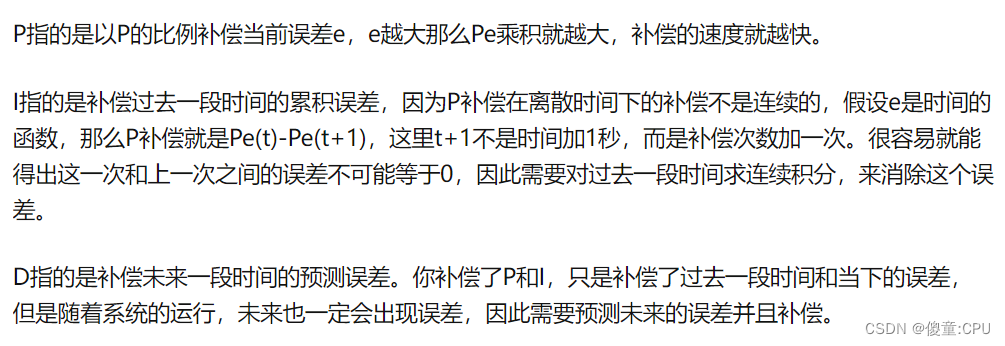
- PID控制原理
- DropboxC2 工具原理总结——就是通过dropbox文件来间接做c2控制和交互。
- 【数据库管理】③控制文件
- Scratch3.0——助力新进程序员理解程序(五、控制)
- 【FPGA实验】按键控制流水灯
- Kubernetes Helm Chart模板:流程控制