
2.摄像机标定
摄像机 标定
2023-09-14 09:14:43 时间
针孔模型 & 透镜摄像机标定问题
摄像机标定:即求解摄像机内、外参数矩阵
为什么摄像机标定很重要?
摄像机内、外参数矩阵描述了三维世界到二维像素的映射关系
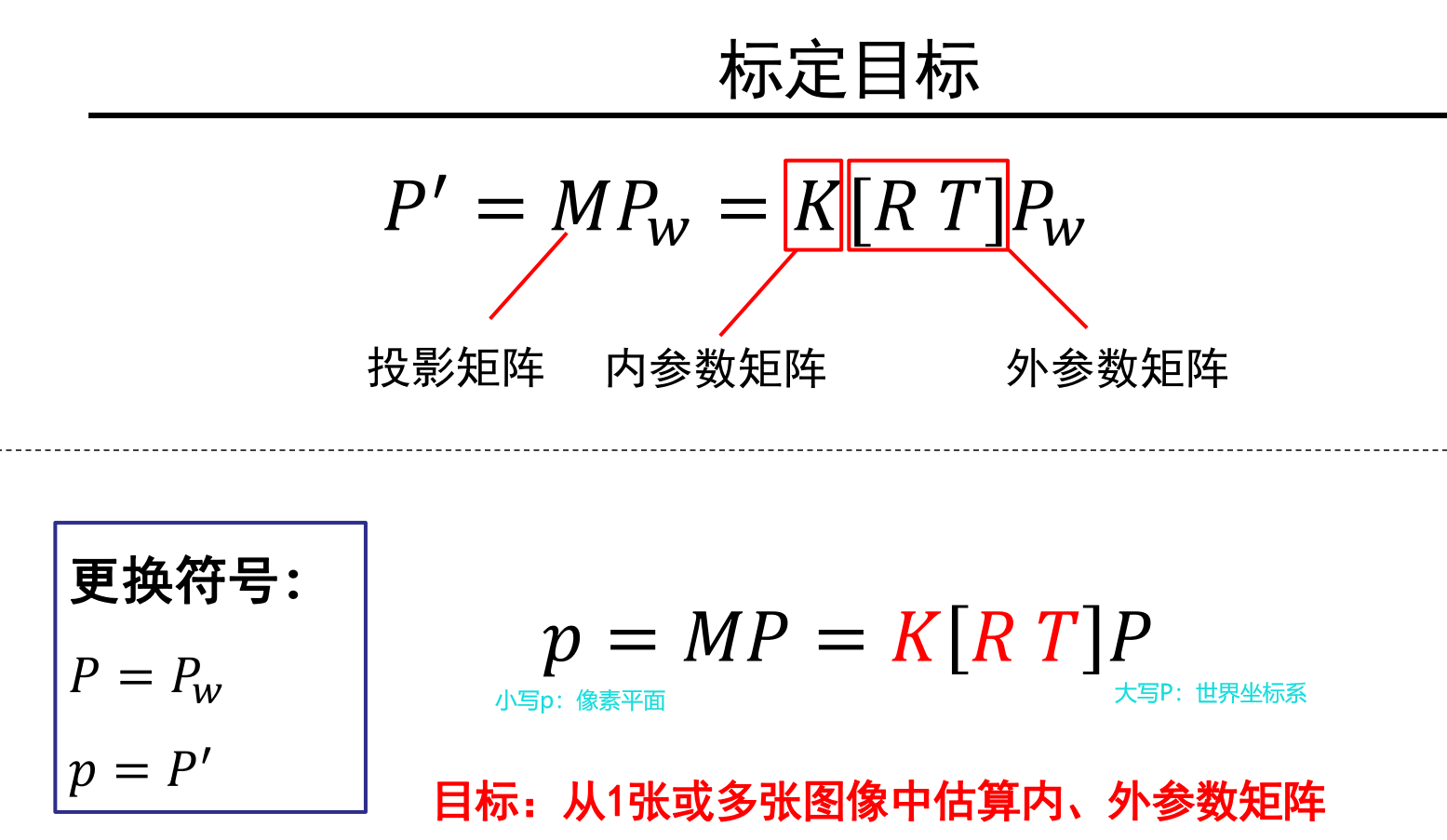
要求出内外参数矩阵,就利用出p和P从而求出它们,幸运的是p和P我们都是已知的
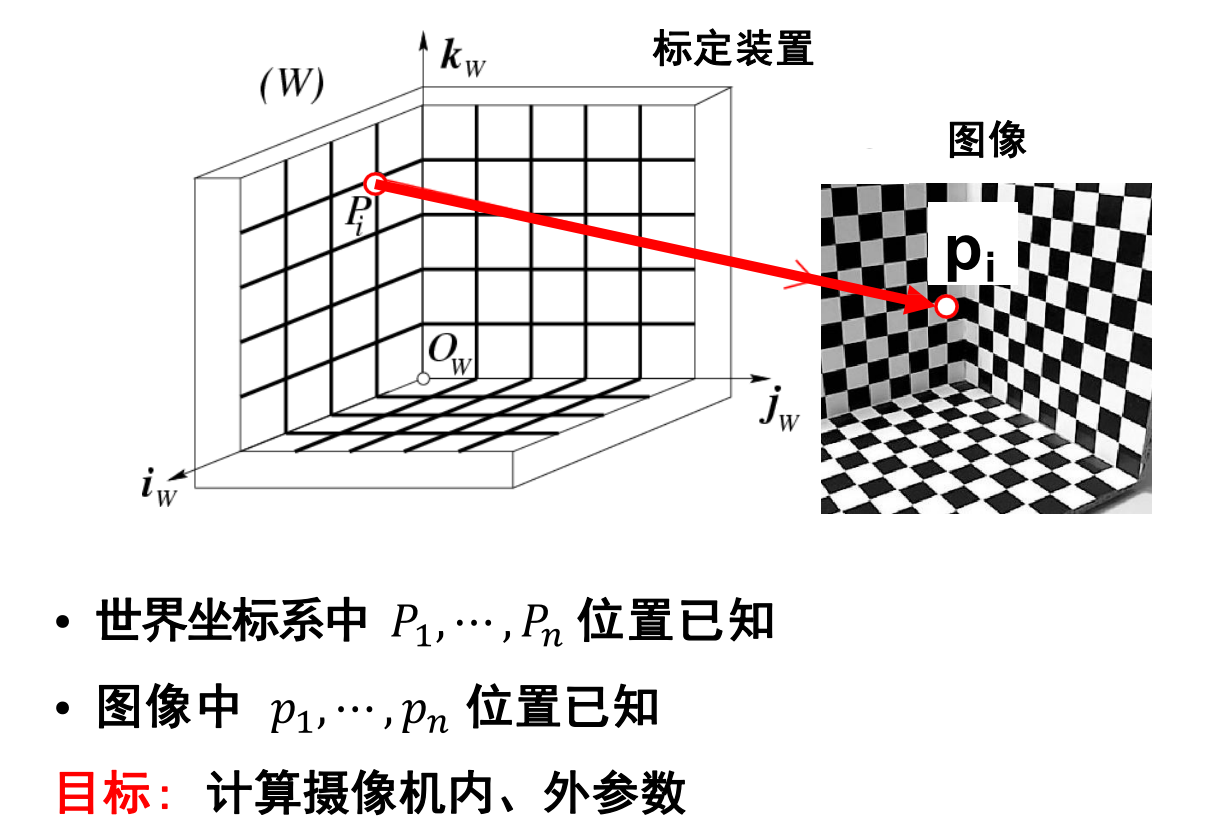
如何求解摄像机的内外参数?
首先我们将像素平面上的点用"u, v, m, p"表示出来
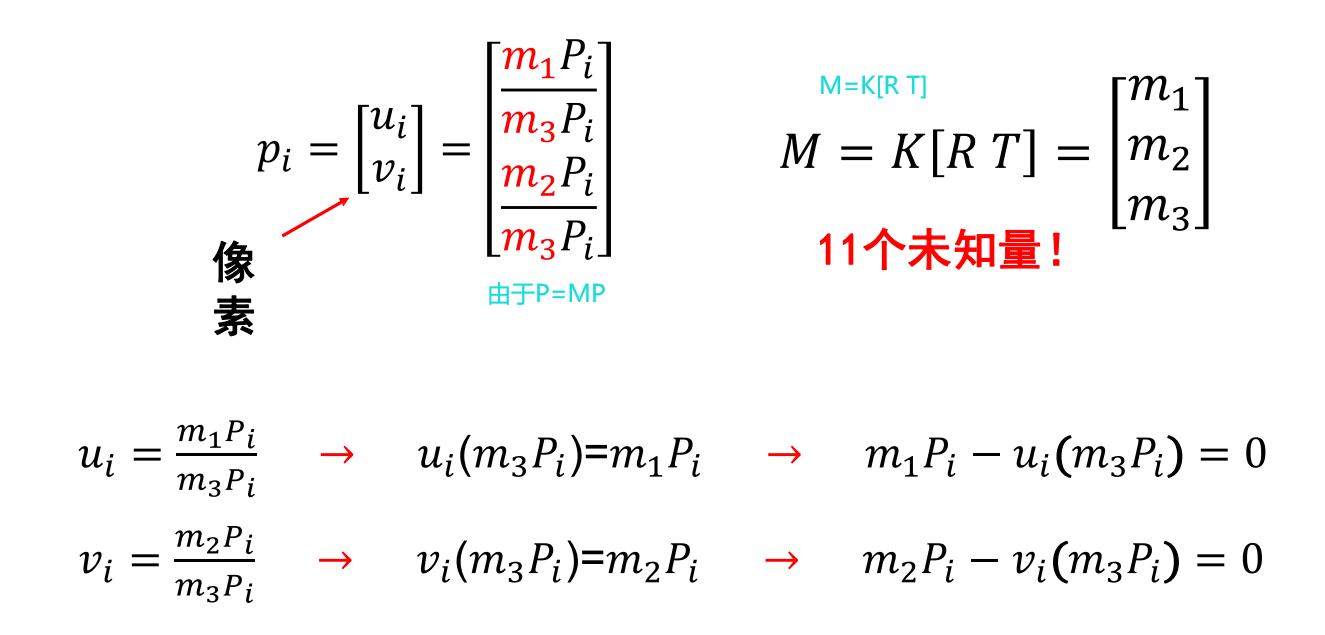
求解投影矩阵M需要多少对应点?
需要6对点对应(因为1个点有两个公式,我们需要使用6*2=12个公式才可以求出11个未知量),且它们不能处于同一平面,否则会出现退化现象,而无法求出投影矩阵M所有的未知量(11个未知量)
注意:实际操作中我们使用多于6对点来获得更加鲁棒的效果
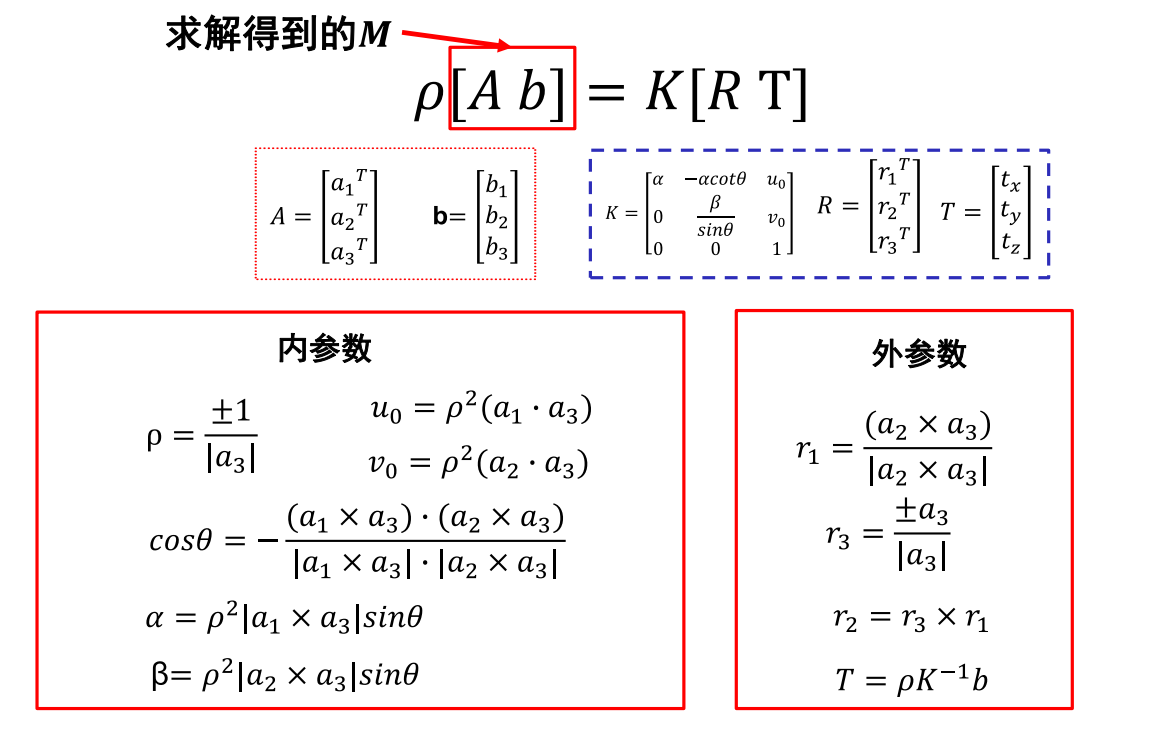
然后经过一系列很复杂的求解操作,我们得到摄像机所有的未知数:
点乘和叉乘的定义:
径向畸变的摄像机标定
“径向畸变的摄像机标定” 是 “透镜摄像机标定问题”的复杂版本
相关文章
- EasyNVR摄像机网页无插件直播方案H5前端构建之:关于接口调用常见的一些问题(401 Unauthorized)
- 内网网络摄像机(RTSP/IPC/NVR)如何能在公网进行RTMP/HLS/HTTP-FLV直播
- 普通摄像机也能做互联网HLS(m3u8)、RTMP、HTTP-FLV直播?是的,采用基于GBT28181协议的EasyGBS流媒体服务
- 基于EasyNVR摄像机无插件直播流媒体服务器实现类似于单点登录功能的免登录直播功能
- EasyNVR无插件摄像机直播之:摄像机网页低延时无插件直播实现
- EasyNVR RTSP摄像机转HLS直播服务器中使用Onvif协议控制预置位
- EasyNVR H5无插件摄像机直播解决方案前端解析之:videojs的使用
- 通过摄像机视频设备或者流媒体服务器SDK获取到数据转换成RTMP流实现网页/手机微信播放
- 如何用传统摄像机实现直接对接平台,类似于海康萤石、大华乐橙的方案
- EasyDarwin云平台:EasyCamera开源摄像机接入海康威视摄像机PS流转ES流
- 1.摄像机几何