
基于目标运动模型和观测模型的交互多模算法IMM卡尔曼滤波目标跟踪matlab仿真
目录
1.算法描述
IMM算法的基本思想是用多个不同的运动模型匹配机动目标的不同运动模式,不同模型间的转移概率是–个马尔可夫矩阵,目标的状态估计和模型概率的更新使用卡尔曼滤波。
交互式多模型 IMM(Interacting Multiple Model)控制算法的主体思想是基于贝叶斯理论而提出的模型间的自动识别与切换:在任意跟踪时刻,通过设置对应目标可能模型数量的模型滤波器来进行实时的机动模型检测,对每一个滤波器设置权重系数和模型更新的概率,最后加权计算得出当前最优估计状态,从而达到模型自适应跟踪的目的。
机动目标模型描述了目标状态随着时间变化的过程。一个好的模型抵得上大量的数据。当前几乎所有的目标跟踪算法都是基于模型进行状态估计的。在卡尔曼滤波器被引入目标跟踪领域后,基于状态空间的机动目标建模成为主要研究对象之一。
从算法层面,在机动目标跟踪系统中,常用的滤波算法是以卡尔曼滤波器为基本框架的估计算法。卡尔曼滤波器是一种线性、无偏、以误差均方差最小为准则的最优估计算法,它有精确的数学形式和优良的使用效能。卡尔曼滤波方法实质上是一种数据处理方法,它采用递推滤波方法,根据获取的量测数据由递推方程递推给出新的状态估计。由于计算量和存储量小,比较容易满足实时计算的要求,在工程实践中得到广泛应用。
交互多模型(Interacting Multiple Model,简称IMM)算法具有自适应的特点,能够有效地对各个模型的概率进行调整,尤其适用于对机动目标的定位跟踪。交互式多模型算法包含了多个滤波器(各自对应着相应的模计器,一个交互式作用器和一个估计混合器),多模型通过交互作用跟踪一个目标的机动运动,各模型之间的转移由马尔可夫概率转移矩阵确定,其中的元素 表示目标由第i个运动模型转移到第j个运动模型的概率。
在并行计算后,得到多个模型的后验概率,再结合每个模型的滤波估计输出结果,就可以计算各模型交互融合后的联合状态估计结果。
计算目标状态估计:

计算目标状态估计协方差:

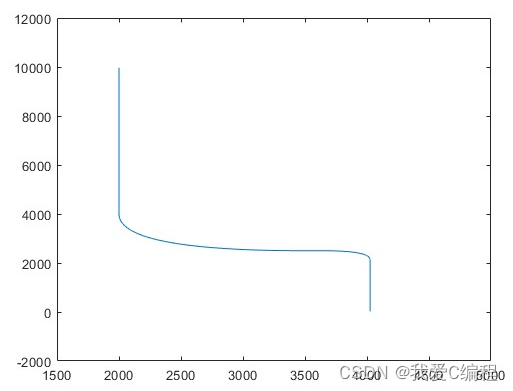
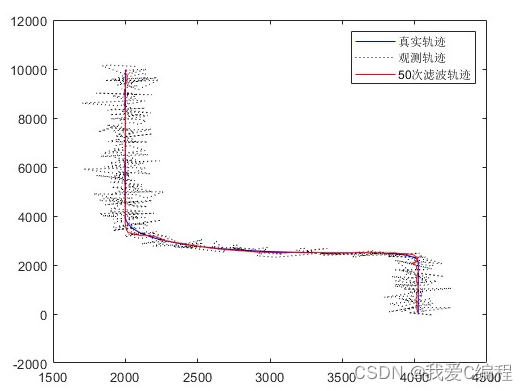
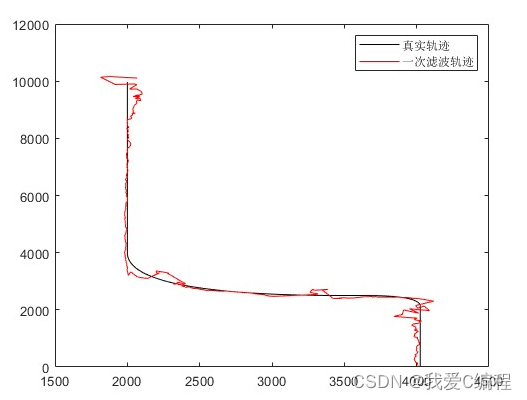
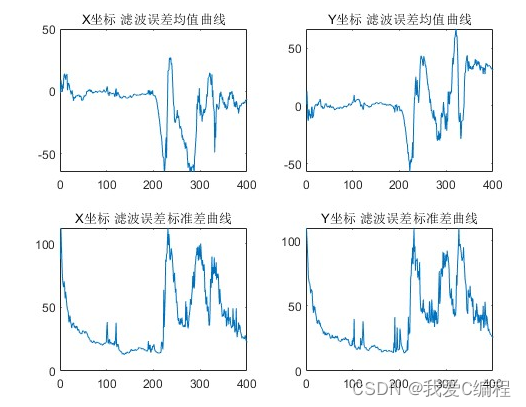
2.仿真效果预览
matlab2022a仿真结果如下:
3.MATLAB核心程序
%%函数2 动态模型
T=2;
I=diag([1,1,1,1,1,1]);
Phi=[1,T,0,0,(T^2)/2,0;0,1,0,0,T,0;0,0,1,T,0,(T^2)/2;0,0,0,1,0,T;0,0,0,0,1,0;0,0,0,0,0,1];
H=[1,0,0,0,0,0;0,0,1,0,0,0];
G=[(T^2)/2,0;T,0;0,(T^2)/2;0,T;1,0;0,1];
R=[10000,0;0,10000]; % 观测噪声方差阵
alpha=0.8; % 加权衰减因子
window=1/(1-alpha); % 检测机动的有效窗口长度
Xm_estimate(k-1,:)=Xm_est;
if qq==1 %由非机动进入机动模型,需进行修正, 初始化
Xm_predict(k,:)=Xm_pre;
Xm_estimate(k,5)=[z1(1)-Xm_predict(k,1)]*2/(T^2);
Xm_estimate(k,6)=[z1(2)-Xm_predict(k,3)]*2/(T^2);
Xm_estimate(k,1)=z1(1);
Xm_estimate(k,3)=z1(2);
Xm_estimate(k,2)=Xm_estimate(k-1,2)+Xm_estimate(k,5)*T;
Xm_estimate(k,4)=Xm_estimate(k-1,4)+Xm_estimate(k,6)*T;
% 修正协方差阵
Pm_estimate(1,1)=R(1,1);
Pm_estimate(3,3)=R(2,2);
Pm_estimate(1,2)=R(1,1)*2/T;
Pm_estimate(2,1)=Pm_estimate(1,2);
Pm_estimate(3,4)=R(2,2)*2/T;
Pm_estimate(4,3)=Pm_estimate(3,4);
Pm_estimate(1,5)=R(1,1)*2/(T^2);
Pm_estimate(5,1)=Pm_estimate(1,5);
Pm_estimate(3,6)=R(2,2)*2/(T^2);
Pm_estimate(6,3)=Pm_estimate(3,6);
Pm_estimate(5,5)=[R(1,1)+P(1)+P(2)*2*T+P(3)*T*T]*4/(T^4);
Pm_estimate(6,6)=[R(2,2)+P(4)+P(5)*2*T+P(6)*T*T]*4/(T^4);
Pm_estimate(2,2)=R(1,1)*4/(T^2)+P(1)*4/(T^2)+P(3)+P(2)*4/T;
Pm_estimate(4,4)=R(2,2)*4/(T^2)+P(4)*4/(T^2)+P(6)+P(5)*4/T;
Pm_estimate(2,5)=R(1,1)*4/(T^3)+P(1)*4/(T^3)+P(3)*2/T+P(2)*6/(T^2);
Pm_estimate(5,2)=Pm_estimate(2,5);
Pm_estimate(4,6)=R(2,2)*4/(T^3)+P(4)*4/(T^3)+P(6)*2/T+P(5)*6/(T^2);
Pm_estimate(6,4)=Pm_estimate(4,6);
Xm_est=Xm_estimate(k,:);
qq=0;%修正后,标志qq复位(不再初始化),ua1设为10,使不进入非机动模型
ua1=10;
m=0;
else
% 滤波方程
Xm_predict(k,:)=(Phi*Xm_estimate(k-1,:)')';
Q=[(Xm_estimate(k-1,5)/20)^2,0;0,(Xm_estimate(k-1,6)/20)^2];
Pm_predict=Phi*Pm_estimate*(Phi)'+G*Q*G';
K=Pm_predict*(H)'*inv(H*Pm_predict*(H)'+R);
Xm_estimate(k,:)=(Xm_predict(k,:)'+K*(z1-H*Xm_predict(k,:)'))';
Pm_estimate=(I-K*H)*Pm_predict;
Xm_est=Xm_estimate(k,:);
m=m+1;
delta(k)=[Xm_estimate(k,5),Xm_estimate(k,6)]*[Pm_estimate(5,5),0;0,Pm_estimate(6,6)]*[Xm_estimate(k,5);Xm_estimate(k,6)];
if m>=window
ua(k)=delta(k)+delta(k-1)+delta(k-2)+delta(k-3)+delta(k-4);
ua1=ua(k);
else
ua1=10;
end
end
A1054.完整MATLAB
V
相关文章
- 基于matlab的Canny算法的边缘检测(附源代码)
- matlab griddata nan,请教Matlab的griddata的用法
- matlab axis画圆,使用MATLAB中axis实现图形坐标控制-Go语言中文社区
- nsga2 matlab,NSGA2算法特征选择MATLAB实现(多目标)
- 如何用matlab编写分段函数_请教各位怎样用matlab定义一个分段函数MATLAB分段函数…[通俗易懂]
- matlab中如何求插值点,MATLAB插值「建议收藏」
- matlab fir带通滤波,基于Matlab的FIR带通滤波器设计与实现
- matlab interp1db,matlab – Matlab interp1图出现数据偏移 – 堆栈内存溢出
- 香农编码的matlab实现总结_matlab简单代码实例
- matlab保存图片函数后突变分辨变化,MATLAB总结 – 图片保存「建议收藏」
- oracle函数的调用应使用execute命令_matlab函数调用
- matlab微分方程组_matlab求微分方程特解
- python 生成随机矩阵_matlab建立m行n列矩阵
- butterworth matlab,Matlab实现Butterworth滤波器
- Matlab 直方图_matlab分析
- MATLAB三维绘图[通俗易懂]
- 指派问题匈牙利算法例题_匈牙利算法matlab代码
- matlab求解延迟微分方程_状态依赖时滞微分方程的动力学研究
- MATLAB数据挖掘用改进的K-Means(K-均值)聚类算法分析高校学生的期末考试成绩数据
- matlab实现RK45(Runge-Kutta45、ode45)求解器算法
- 【MATLAB】基本绘图 ( 修改对象属性 | 修改坐标轴属性 | 修改坐标轴范围 | 修改文字大小 | 修改刻度 | 修改线属性 )
- 【MATLAB】matlab 文档使用 ( 文档查询 | 文档层次 | 自带搜索工具 | 帮助命令 | 学习导引 )
- 【数字信号处理】线性常系数差分方程 ( 卷积 与 “ 线性常系数差分方程 “ | 使用 matlab 求解 “ 线性常系数差分方程 “ )
- 【数字信号处理】线性常系数差分方程 ( 使用 matlab 求解 “ 线性常系数差分方程 “ 示例 | A 向量分析 | B 向量分析 | 输入序列分析 | matlab 代码 )
- 快速安装Linux上的MATLAB(linux安装matlab)