
机器人C++库(12) Robotics Library 之路径规划算法:PRM、RRT、EET算法
2023-09-14 09:14:39 时间
机器人C++库(12)Robotics Library 之路径规划算法:PRM、RRT、EET算法
RL库的运动规划(rl::plan)模块集成了以下经典的路径规划算法:
- PRM算法:概率路线图算法
- RRT算法:快速探索随机树算法
- EET算法:搜索树算法-基于采样:https://blog.csdn.net/yohnyang/article/details/127783244
另外,补充一个开源运动规划库OMPL:https://ompl.kavrakilab.org/index.html
下边参考官方给出来的例程讲述路径规划算法原理及使用,规划效果如下图所示:
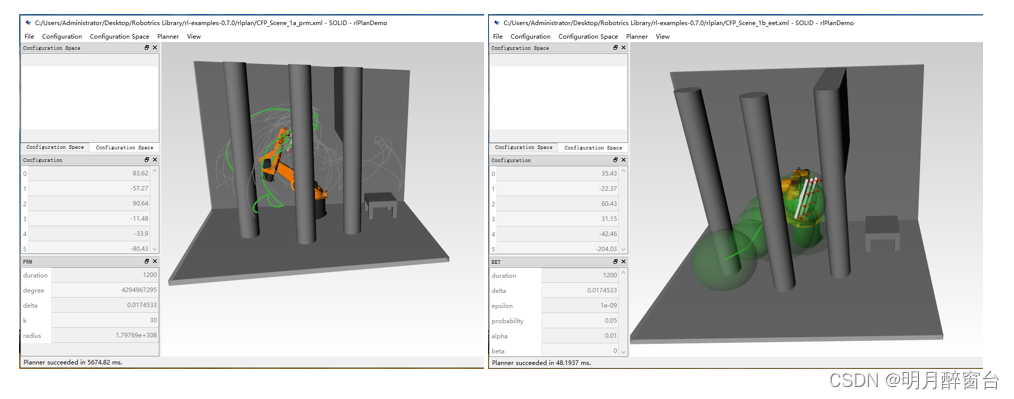
左图是PRM算法进行路径规划的结果,灰色路径是拟生成所有路径,绿色路径是最优路径;右图是采用EET搜索树算法进行规划的结果,绿色球球心连接起点与终点的最短路径即为最优路径。
1.PRM算法</
相关文章
- 【C/C++学院】(10)重载与重写/多态的深入/多继承接口
- C/C++每日一练(20230423)
- C语言/C++常见习题问答集锦(九)
- Atitit.java jna 调用c++ dll 的总结
- 平衡二叉树(C++)
- C++Qt高级——QMake快速入门
- C++音视频开发的技术要点
- 【华为OD机试 2023最新 】 最优高铁城市修建方案(C++ 100%)
- 【华为OD机试 2023最新 】 机器人(C++)
- C++多线程使用条件变量
- C++ string中的find()函数
- C++ list 查找
- c++ vector 初始化_C++--vector()的用法
- c++ vector C++ vector存放结构体 并且排序
- C++之通过地址访问私有成员变量(一百一二十二)
- C++指向函数的指针数组
- webrtc Native C++ Datachannel使用
- VC++ CString互转double
- C++11原子操作的经典代码以及讲解
- 机器人C++库(8)Robotics Library 之防碰撞demo rlCollisionTest
- 机器人C++库(5)Robotics Library 例程二之求解雅可比矩阵
- 机器人C++库(6)Robotics Library 例程三之正逆运动学计算
- 机器人C++库(10)Robotics Library 之碰撞检测算法
- 机器人C++库(7)Robotics Library 之场景模块 rl::sg
- 机器人C++库(4)Robotics Library 例程一之DH模型参数及四元数、变换矩阵
- ubuntu18.04平台 QT5(C++)、OpenGL、DNN联合新版OpenCV5.x构建以及核心算法测试