
【华为机试真题详解】初识动态规划(斐波那契数列)
前言
《华为机试真题详解》专栏含牛客网华为专栏、华为面经试题、华为OD机试真题。
如果您在准备华为的面试,期间有想了解的可以私信我,我会尽可能帮您解答,也可以给您一些建议!
本文解法非最优解(即非性能最优)。
讲解试题
| 试题 | 详情 |
|---|---|
| BM62 斐波那契数列 | 大家都知道斐波那契数列,现在要求输入一个正整数 n ,请你输出斐波那契数列的第 n 项。 |
动态规划的套路
动态规划(Dynamic Programming,DP)是运筹学的一个分支,是求解决策过程最优化的过程。
动态规划的题目比较多,比如:最长递增子序列问题、最短路径问题、背包问题、资源分配问题等。
动态规划并不是万能的,适用动态规划的问题必须满足最优子结构和无后效性。
- 最优子结构:动态规划问题一定会具备最优子结构,通过子问题的最值得到原问题的最值。
- 无后效性:将各阶段按照一定的次序排列好之后,对于某个给定的阶段状态,它以前各阶段的状态无法直接影响它未来的决策,而只能通过当前的这个状态,换句话说,每个状态都是过去历史的一个完整总结。
- 子问题的重叠性:动态规划的关键在于解决重复问题,问题可以按阶段拆分,然后通过空间换时间的方式减少计算时长。
下面通过斐波那契数列问题详解,了解一下什么是状态转移方程,如何解决重叠子问题。
BM62 斐波那契数列
牛客网入口 BM62 斐波那契数列(简单)
斐波那契数列的定义就是一个标志性的状态转移方程,根据方程我们可以知道:
- fib(1)=1
- fib(2)=1
- fib(3)=fib(3-1)+fib(3-2)=2
- fib(4)=fib(4-1)+fib(4-2)=3
- fib(x)=fib(x-1)+fib(x-2)
而在我们解决其他问题时,也需要按这个思路反向推导 状态转移方程。
为啥叫「状态转移方程」?
其实就是为了听起来高端。你把 f(n) 想做一个状态 n,这个状态 n 是由状态 n - 1 和状态 n - 2 相加转移而来,这就叫状态转移。
1. 递归暴力求解
斐波那契数列的数学形式就是递归的,写成代码就是这样:
def dfs(x):
if x == 1 or x == 2:
return 1
# x > 2
return dfs(x-1) + dfs(x-2)
这段代码看上去虽然简洁易懂,但是性能低下,不断的进行重复计算,我们应该怎么解决呢?
假设 n = 5,我们画出递归树,如下图:
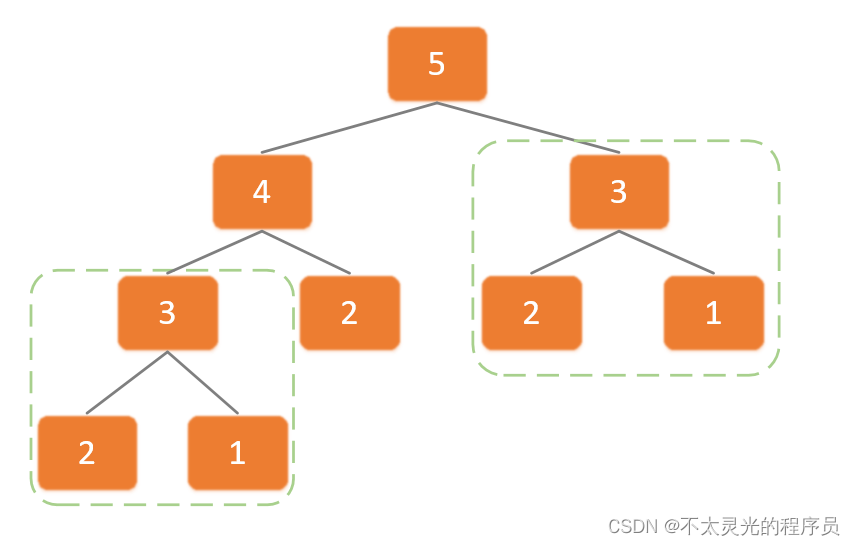
在递归树中我们可以看出,f(3) 子问题被计算了两次,如果n值很大时子问题被重复计算的次数会更多,这就是动态规划问题的第一个性质:子问题的重叠性。
2. 子问题优化的递归求解
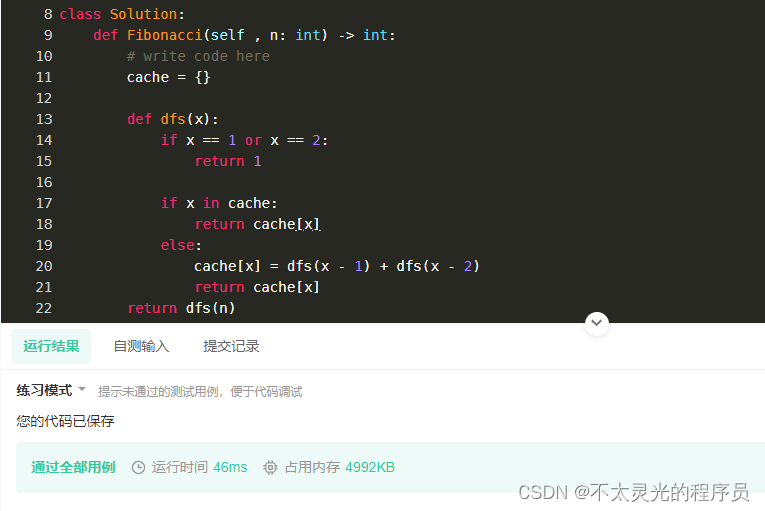
通过上面的分析不难发现,如果我们将之前已经计算的结果保存下来,下一次子问题计算时现在缓存中查找是否有计算过,如果已经计算过直接把答案拿出来用,不要再耗时去计算了,保证相同的子问题只计算一次。
cache = {}
def dfs(x):
if x == 1 or x == 2:
return 1
if x in cache:
return cache[x]
else:
cache[x] = dfs(x - 1) + dfs(x - 2)
return cache[x]
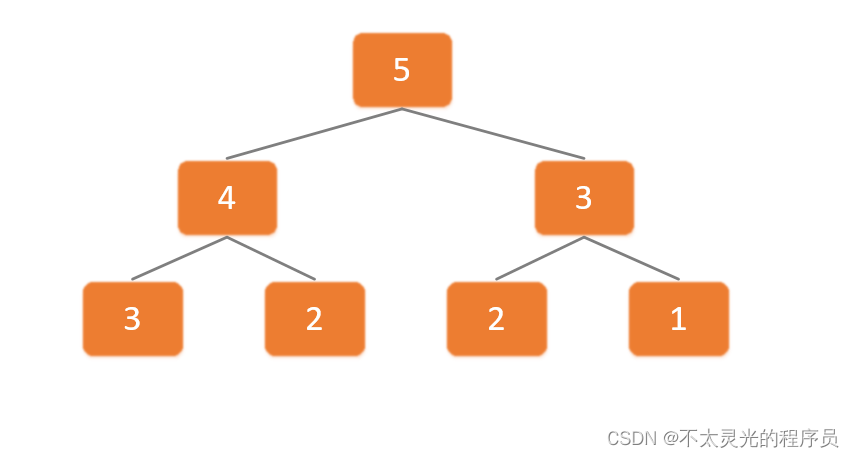
此时的递归树递归深度减少,实际上,子问题优化的递归算法,就是把一棵存在巨量冗余的递归树通过「剪枝」,改造成了一幅不存在冗余的递归图,极大减少了子问题(即递归图中节点)的个数。
你会发现,上面的两种解法中 return f(n - 1) + f(n - 2) 就是状态转移方程式。可见列出状态转移方程的重要性,它是解决问题的核心。
而且很容易发现,其实状态转移方程直接代表着暴力解法。千万不要看不起暴力解,动态规划问题最困难的就是写出这个暴力解,即状态转移方程。
我们在对比下动态转移方程和暴力解法:
def dfs(x):
if x == 1 or x == 2:
return 1
# x > 2
return dfs(x-1) + dfs(x-2)
耗时比较


相关文章
- MoveIt运动规划-1
- 华为OD机试 - 高效的任务规划(Java & JS & Python)
- Algorithm:C++语言实现之动态规划算法相关(矩阵连乘状态转移方程、字符串的交替连接、分析格网棋盘的特点、最短路线问题、生产计划问题、动态规划解下列非线性规划)
- 基于人工蜂群算法的新型概率密度模型无人机路径规划(Matlab代码实现)
- 高密度城市路线规划的遗传优化算法的matlab仿真,城市点数量达到500个
- matlab 动态规划逆序法及应用实例
- 152. 乘积最大子数组-动态规划
- [LeetCode] 213. 打家劫舍II ☆☆☆(动态规划)
- [LeetCode] 392. 判断子序列 ☆(动态规划)
- 180:vue+openlayers 模仿共享单车,判断点是否放在规划的电子围栏内
- 自动驾驶决策控制及运动规划史上最详细最接地气综述
- HDU 4050 wolf5x(动态规划-概率DP)
- 开发人员如何规划自己的职业生涯
- 1小时带你了解软件测试行业,附送一份超清晰的学习规划路线
- Python小白的数学建模课-04.整数规划
- 解锁复杂问题的秘密武器:动态规划算法
- matlab机械臂建模运动学仿真+轨迹规划