
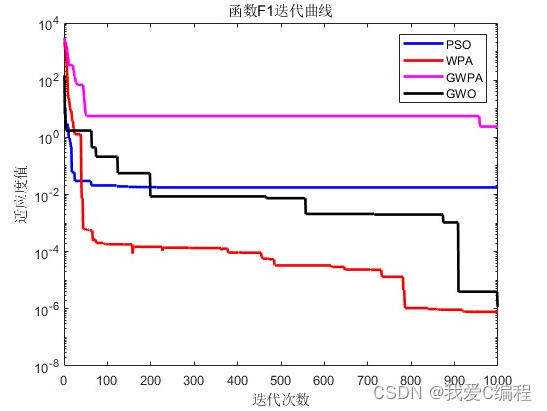
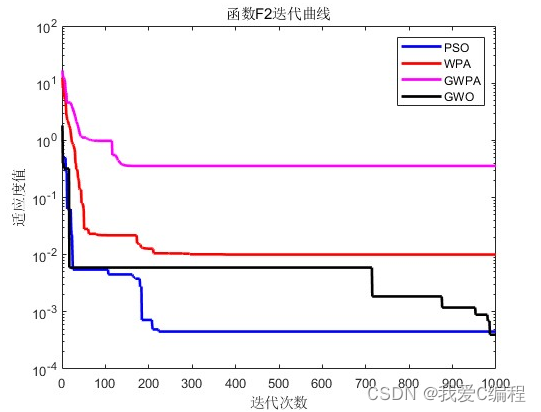
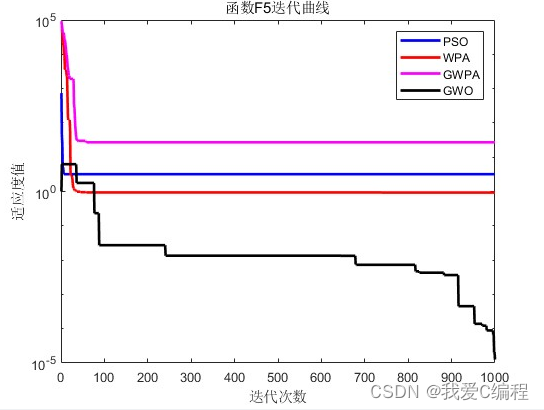
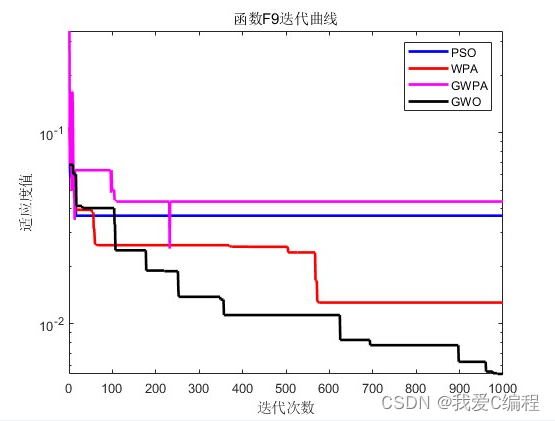
m对比PSO,WPA,GWPA以及GWO四种优化算法的优化性能,优化目标函数为10个来自CEC2017的标准测试函数
目录
1.算法描述
灰狼优化算法(GWO),灵感来自于灰狼.GWO算法模拟了自然界灰狼的领导层级和狩猎机制.四种类型的灰狼,如 α,β,δ,w 被用来模拟领导阶层。此外,还实现了狩猎的三个主要步骤:寻找猎物、包围猎物和攻击猎物。
为了在设计GWO算法时对灰狼的社会等级进行数学建模,我们将最适解作为α .因此,第二和第三个最佳解决方案分别被命名为 β 和 δ .剩下的候选解被假定为 w .在GWO算法中,狩猎过程由 ,α,β 和 δ 引导. w 狼跟随这三只狼。
在狩猎过程中,将灰狼围捕猎物的行为定义如下:
D=|C⋅Xp(t)−X(t)| (1)
X(t+1)=Xp(t)−A⋅D (2)
式(1)表示个体与猎物间的距离,式(2)是灰狼的位置更新公式.其中, t 是目前的迭代代数, A 和 C 是系数向量, Xp 和 X 分别是猎物的位置向量和灰狼的位置向量. A 和 C 的公式如下:
A=2a⋅r1−a (3)
C=2⋅r2 (4)
其中, a 是收敛因子,随着迭代次数从2线性减小到0, r1 和 r2 的模取[0,1]之间的随机数.
2.2 狩猎
灰狼能够识别猎物的位置并包围它们.当灰狼识别出猎物的位置后, β 和 δ 在 α 的带领下指导狼群包围猎物.灰狼个体跟踪猎物位置的数学模型描述如下:
Dα=|C1⋅Xα−X|
Dβ=|C2⋅Xβ−X| (5)
Dδ=|C3⋅Xδ−X|
其中, Dα , Dβ和 Dδ 分别表示 α,β 和 δ 与其他个体间的距离; Xα,Xβ 和 Xδ 分别代表 α,β 和 δ 当前位置; C1,C2,C3 是随机向量, X 是当前灰狼的位置。
X1=Xα−A1⋅(Dα)
X2=Xβ−A2⋅(Dβ) (6)
X3=Xδ−A3⋅(Dδ)
X(t+1)=X1+X2+X33 (7)
式(6)分别定义了狼群中 w 个体朝向 α,β 和 δ 前进的步长和方向,式(7)定义了ω的最终位置。
2.3 攻击猎物
当猎物停止移动时,灰狼通过攻击来完成狩猎过程.为了模拟逼近猎物, a 的值被逐渐减小,因此 A 的波动范围也随之减小.换句话说,在迭代过程中,当 a 的值从2线性下降到0时,其对应的 A 的值也在区间 [−a,a] 内变化.如图3所 示,当 A 的值位于区间内时,灰狼的下一位置可以位于其当前位置和猎物位置之间的任意位置.当 |A|<1 时,狼群向猎物发起攻击(陷入局部最优).当 |A|>1 时,灰狼与猎物分离,希望找到更合适的猎物(全局最优).
GWO算法还有另一个组件 C 来帮助发现新的解决方案.由式(4)可知, C 是[0,2]之 间 的随机值. C 表示狼所在的位置对猎物影响的随机权重, C>1 表示影响权重大,反之,表示影响权重小.这有助于GWO算法更随机地表现并支持探索,同时可在优化过程中避免陷入局部最优.另外,与 A 不同, C 是非线性减小的.这样,从最初的迭代到最终的迭代中,它都提供了决策空间中的全局搜索.在算法陷入了局部最优并且不易跳出时, C 的随机性在避免局部最优方面发挥了非常重要的作用,尤其是在最后需要获得全局最优解的迭代中.
2.仿真效果预览
matlab2022a仿真结果如下:
3.MATLAB核心程序
...........................................................
Iters = 1000; %最大迭代次数
Num = 50;
%初始化种群的个体(可以在这里限定位置和速度的范围)
xpos = Lmin + (Lmax-Lmin)*rand(Num,dim);
xpos0 = xpos;
Alpx = zeros(1,dim);
Alps = 1000;
btx = zeros(1,dim);
bts = 1000;
dltx = zeros(1,dim);
dlts = 1000;
Pbest = zeros(1,Iters);
for t=1:Iters
t
for i=1:Num
if t > 1
r1 = rand;
r2 = rand;
A0 = 2*a*r1-a;%公式5
C0 = 2*r2; %公式6
dd = abs(C0*xpos(i,:)-xpos0(i,:));
xpos(i,:) = xpos(i,:) - A0*dd;
end
Yi = func_F1_10(xpos(i,:),sel);
if Yi<Alps
Alps = Yi;
Alpx = xpos(i,:);
end
if Yi>Alps && Yi<bts
bts = Yi;
btx = xpos(i,:);
end
if Yi>Alps && Yi>bts && Yi<dlts
dlts = Yi;
dltx = xpos(i,:);
end
end
a=2*(1-(t/Iters));
for i=1:Num
for j=1:dim
r1 = rand;
r2 = rand;
A1 = 2*a*r1-a;%公式5
C1 = 2*r2; %公式6
D_alpha = abs(C1*Alpx(j)-xpos(i,j));%公式7
X1 = Alpx(j)-A1*D_alpha; %公式10
r1 = rand;
r2 = rand;
A2 = 2*a*r1-a; %公式5
C2 = 2*r2; %公式6
D_beta = abs(C2*btx(j)-xpos(i,j)); %公式8
X2 = btx(j)-A2*D_beta; %公式11
r1 = rand;
r2 = rand;
A3 = 2*a*r1-a; %公式5
C3 = 2*r2; %公式6
D_delta = abs(C3*dltx(j)-xpos(i,j)); %公式9
X3 = dltx(j)-A3*D_delta; %公式12
xpos(i,j) = (X1+X2+X3)/3;%公式13
end
end
Pbest(t) = func_F1_10(Alpx,sel);
end
02_060m4.完整MATLAB
V
相关文章
- 燃!中原银行获信通院研发效能度量工具级『产业推广级』标准评估
- 树标准、搭架构,偶数科技的“湖仓一体”特别在哪?
- PHP SPL标准库 基本的一些例子和实践
- 腾讯云 CODING 受邀参与业内首个汽车行业软件研发效能成熟度模型标准研讨会
- 结构建模设计——Solidworks软件之装配体操作基本总结二(装配体内编辑零件、新建零件、标准配合操作)
- C/C++ Qt 标准Dialog对话框组件应用
- 【Kotlin】标准库函数 ① ( apply 标准库函数 | let 标准库函数 )
- PostgreSQL标准建表语句分享
- 容器标准之争:Docker赢了,CoreOS也没输
- Oracle 28001标准应用专利实践(28001oracle)
- C++标准之(ravaluereference)右值引用介绍
- Python标准异常和异常处理详解