
m基于混合高斯模型和帧间差分相融合的自适应视频背景提取算法matlab仿真
目录
1.算法仿真效果
matlab2013b仿真结果如下:
混合高斯模型背景提取:


利用混合高斯模型处理这段视频,黑车已经运动离开画面左下角时,左下角仍然有黑车,这种现象我们称为“鬼影”。其产生的原因是由于混合高斯模型是对图像每个像素建立模型,所以算法的更新速度跟不上物体的变化,产生了滞留情况,这就是“鬼影”
如图所示,(a)中原始图像左下角的黑车静止,所以背景更新图像中左下角也有一个黑车;(b)中原始图像里的黑车早已运动,离开了左下角,但背景更新图像的左下角还有黑车,这就是“鬼影”;(c)也是,原始图像里黑车已经驶出画面,但背景更新图像的左下角还有黑车,这就是鬼影。
混合高斯模型和帧间差分相融合的自适应视频背景提取:

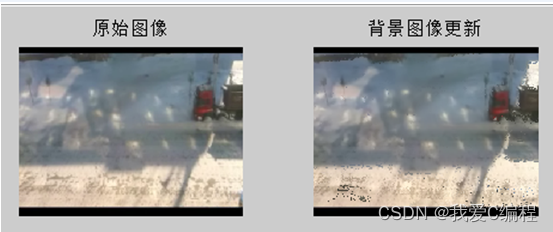
通过对比可以看到,通过改进方案,可以得到较为清晰的视频背景。
“混合高斯模型与帧差法相结合”的这种算法处理视频后,抽取其中三帧,其中(a)是原始图像中黑车静止在画面的左下角;(b)是原始图像中黑车不在左下角背景更新图像左下角红框里的“黑车鬼影”没有了原始图像中黑车已经驶出画面时,那么对应的背景更新图像左下角的“黑车鬼影”必须消失,这样才达到了改进的效果。
2.MATLAB核心程序
...............................................................................
disp('正在读取视频...');
FileName_AVI = 'Vedio\test.avi';
[Obj,frameNum_Original] = get_AVI(FileName_AVI);
[pixel_original,pixel_gray] = vedio_op(Obj,frameNum_Original);
clear Obj;
for i = 1:frameNum_Original
pixel_gray2(:,:,i) = imresize(pixel_gray(:,:,i),[RR,CC]);
pixel_original2(:,:,:,i) = imresize(pixel_original(:,:,:,i),[RR,CC]);
end
clear pixel_gray pixel_original;
disp('读取视频完毕...');
disp('正在进行高斯混合模型的仿真...');
for i = 1:RR/CK
i
for j = 1:CC/CK
[image_sequence2,background_Update2,Images02,Images22] = func_Mix_Gauss_Model_diff(TT,pixel_original2(CK*(i-1)+1:CK*i,CK*(j-1)+1:CK*j,:,:),frameNum_Original,CK,CK,K,Alpha,Rho,Deviation_sq,Variance,Props,Back_Thresh,Comp_Thresh,SHADOWS);
image_sequence(CK*(i-1)+1:CK*i,CK*(j-1)+1:CK*j,:,:) = image_sequence2;
background_Update(CK*(i-1)+1:CK*i,CK*(j-1)+1:CK*j,:,:) = background_Update2;
Images0(CK*(i-1)+1:CK*i,CK*(j-1)+1:CK*j,:) = Images02;
Images2(CK*(i-1)+1:CK*i,CK*(j-1)+1:CK*j,:) = Images22;
end
end
disp('高斯混合模型的仿真完毕...');
disp('正在显示效果...');
figure;
for tt = 1:frameNum_Original
tt
subplot(221)
imshow(image_sequence(:,:,:,tt));
title('原始图像');
subplot(222)
imshow(uint8(background_Update(:,:,:,tt)));
title('背景图像更新');
subplot(223)
imshow(Images0(:,:,tt));
title('运动目标检测');
subplot(224)
imshow(Images2(:,:,tt));
title('运动目标检测去阴影');
pause(0.001);
end
disp('显示效果完毕...');
10_015_m3.算法涉及理论知识概要
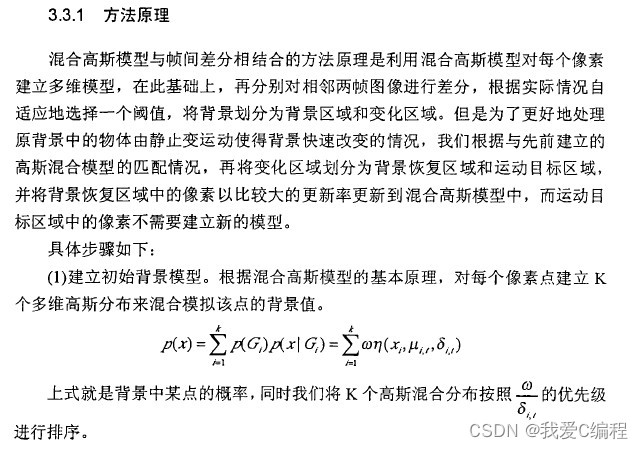
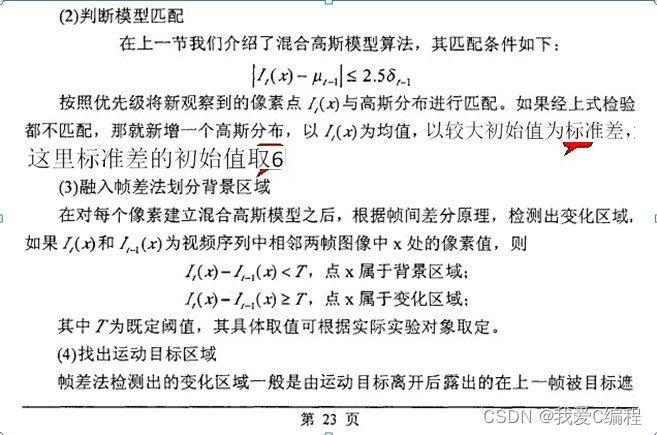
在Stauffer等人提出的自适应混合高斯背景模型基础上,为每个像素构建混合高斯背景模型,通过融入帧间差分把每帧中的图像区分为背景区域、背景显露区域和运动物体区域。相对于背景区域,背景显露区中的像素点将以大的更新率更新背景模型,使得长时间停滞物体由背景变成运动前景时,被遮挡的背景显露区被快速恢复。与Stauffer等人提出的方法不同的是,物体运动区不再构建新的高斯分布加入到混合高斯分布模型中,减弱了慢速运动物体对背景的影响。实验结果表明,在有诸多不确定性因素的序列视频中构建的背景有较好的自适应性,能迅速响应实际场景的变化。
混合高斯模型使用K(基本为3到5个) 个高斯模型来表征图像中各个像素点的特征,在新一帧图像获得后更新混合高斯模型,用当前图像中的每个像素点与混合高斯模型匹配,如果成功则判定该点为背景点, 否则为前景点。通观整个高斯模型,他主要是有方差和均值两个参数决定,,对均值和方差的学习,采取不同的学习机制,将直接影响到模型的稳定性、精确性和收敛性。由于我们是对运动目标的背景提取建模,因此需要对高斯模型中方差和均值两个参数实时更新。为提高模型的学习能力,改进方法对均值和方差的更新采用不同的学习率;为提高在繁忙的场景下,大而慢的运动目标的检测效果,引入权值均值的概念,建立背景图像并实时更新,然后结合权值、权值均值和背景图像对像素点进行前景和背景的分类。具体更新公式如下: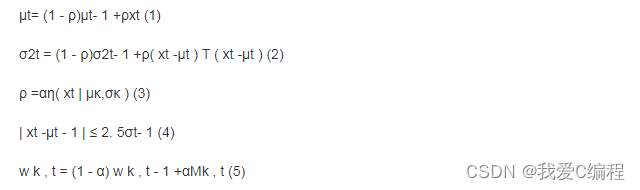

4.完整MATLAB
V
相关文章
- 智能优化算法——正余弦优化算法(Matlab代码实现)
- 基于优化自适应微分电导算法的最大功率点跟踪改进最大功率点跟踪技术(Matlab代码实现)
- 计及需求响应的粒子群算法求解风能、光伏、柴油机、储能容量优化配置(Matlab代码实现)
- 【优化调度】基于模拟退火优化算法求解船舶优化调度问题(Matlab代码实现)
- 基于免疫优化算法的物流配送中心选址规划研究(Matlab实现)
- 基于象鼻虫损害优化算法求解装箱问题问题(Matlab代码实现)
- 基于混合VNS(变邻域搜索算法)的PSO(粒子群优化算法)的任务分配问题(Matlab代码实现)
- 基于蜜蜂算法的资源受限项目优化调度(Matlab代码实现)
- 【不确定性研究】基于信息间隙决策理论的综合能源系统优化调度研究【改进粒子群优化算法求解】(Matlab代码实现)
- 基于ABC、PSO和SQP优化算法实现电力变压器绕组的独特电路合成研究(Matlab代码实现)
- 基于PSO优化的OFDM系统PAPR抑制PTS算法MATLAB仿真
- 基于matlab的GPS信号相关检测算法仿真
- 基于polar码和SCMA的多用户检测的联合检测译码matlab仿真,polar采用SCAN软译码,SCMA用MPA算法
- m基于机器学习MLP的OFDM信道估计误码率matlab仿真,对比LS和MMSE两种信道估计算法
- m低信噪比下GPS信号的捕获算法研究,分别使用matlab和FPGA对算法进行仿真和硬件实现
- m基于MSOPSO多策略粒子群算法的目标优化matlab仿真
- m基于高斯滤波和八方向sobel边缘提取的道路检测和提取算法matlab仿真
- 基于CNN卷积神经网络的语音信号识别算法matlab仿真
- 基于LGC局部全局一致性和SVM支持向量机的半监督分类算法matlab仿真
- 基于6自由度飞行器的EKF和INS融合算法的MATLAB仿真
- 基于Astar算法的栅格地图最优路径搜索matlab仿真,可以修改任意数量栅格