
【图像分类】实战——使用ResNet实现猫狗分类(pytorch)
目录
摘要
ResNet(Residual Neural Network)由微软研究院的Kaiming He等四名华人提出,通过使用ResNet Unit成功训练出了152层的神经网络,并在ILSVRC2015比赛中取得冠军,在top5上的错误率为3.57%,同时参数量比VGGNet低,效果非常明显。
模型的创新点在于提出残差学习的思想,在网络中增加了直连通道,将原始输入信息直接传到后面的层中,如下图所示:

传统的卷积网络或者全连接网络在信息传递的时候或多或少会存在信息丢失,损耗等问题,同时还有导致梯度消失或者梯度爆炸,导致很深的网络无法训练。ResNet在一定程度上解决了这个问题,通过直接将输入信息绕道传到输出,保护信息的完整性,整个网络只需要学习输入、输出差别的那一部分,简化学习目标和难度。VGGNet和ResNet的对比如下图所示。ResNet最大的区别在于有很多的旁路将输入直接连接到后面的层,这种结构也被称为shortcut或者skip connections。

在ResNet网络结构中会用到两种残差模块,一种是以两个3*3的卷积网络串接在一起作为一个残差模块,另外一种是1*1、3*3、1*1的3个卷积网络串接在一起作为一个残差模块。如下图所示:

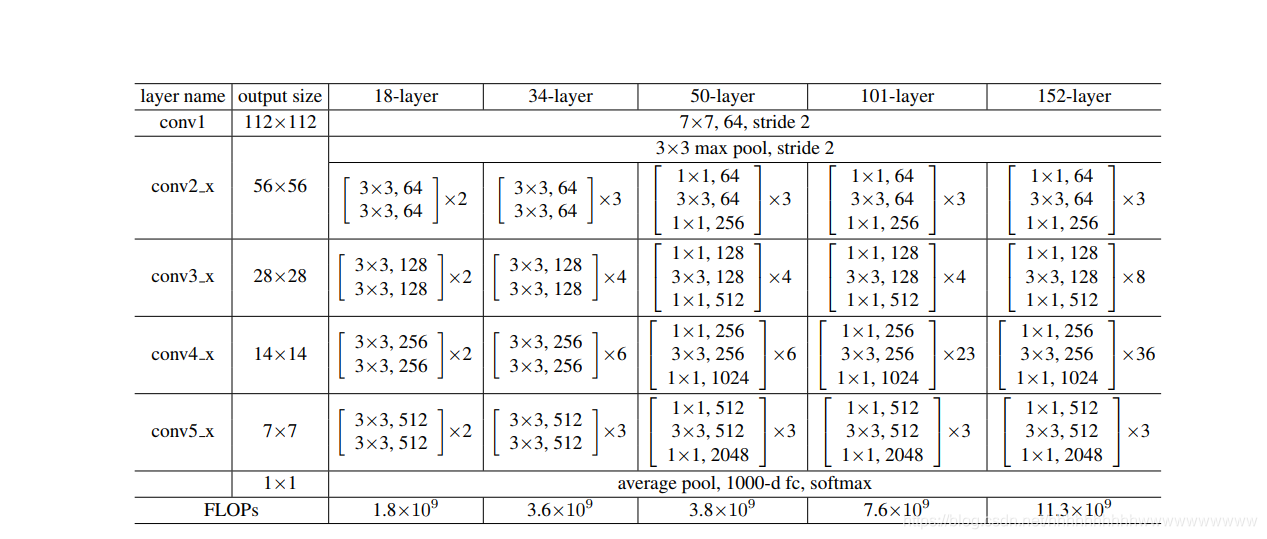
ResNet有不同的网络层数,比较常用的是18-layer,34-layer,50-layer,101-layer,152-layer。他们都是由上述的残差模块堆叠在一起实现的。 下图展示了不同的ResNet模型。
本次使用ResNet18实现图像分类,模型使用pytorch集成的模型。
具体的实现方式可以查考这篇文章。里面说的很详细了。但是我们在实战项目中能用官方的还是优先选用官方的,有预训练模型,而且有的模型还做了优化。
手撕ResNet——复现ResNet(Pytorch)_AI浩-CSDN博客
导入项目使用的库
import torch.optim as optim
import torch
import torch.nn as nn
import torch.nn.parallel
import torch.optim
import torch.utils.data
import torch.utils.data.distributed
import torchvision.transforms as transforms
import torchvision.datasets as datasets
import torchvision.models
from effnetv2 import effnetv2_s
from torch.autograd import Variable设置全局参数
设置BatchSize、学习率和epochs,判断是否有cuda环境,如果没有设置为cpu。
# 设置全局参数
modellr = 1e-4
BATCH_SIZE = 64
EPOCHS = 20
DEVICE = torch.device('cuda' if torch.cuda.is_available() else 'cpu')图像预处理
在做图像与处理时,train数据集的transform和验证集的transform分开做,train的图像处理出了resize和归一化之外,还可以设置图像的增强,比如旋转、随机擦除等一系列的操作,验证集则不需要做图像增强,另外不要盲目的做增强,不合理的增强手段很可能会带来负作用,甚至出现Loss不收敛的情况。
# 数据预处理
transform = transforms.Compose([
transforms.Resize((224, 224)),
transforms.ToTensor(),
transforms.Normalize([0.5, 0.5, 0.5], [0.5, 0.5, 0.5])
])
transform_test = transforms.Compose([
transforms.Resize((224, 224)),
transforms.ToTensor(),
transforms.Normalize([0.5, 0.5, 0.5], [0.5, 0.5, 0.5])
])读取数据
使用Pytorch的默认方式读取数据。数据的目录如下图:

训练集,取了猫狗大战数据集中,猫狗图像各一万张,剩余的放到验证集中。
# 读取数据
dataset_train = datasets.ImageFolder('data/train', transform)
print(dataset_train.imgs)
# 对应文件夹的label
print(dataset_train.class_to_idx)
dataset_test = datasets.ImageFolder('data/val', transform_test)
# 对应文件夹的label
print(dataset_test.class_to_idx)
# 导入数据
train_loader = torch.utils.data.DataLoader(dataset_train, batch_size=BATCH_SIZE, shuffle=True)
test_loader = torch.utils.data.DataLoader(dataset_test, batch_size=BATCH_SIZE, shuffle=False)
设置模型
使用交叉熵作为loss,模型采用resnet18,建议使用预训练模型,我在调试的过程中,使用预训练模型可以快速得到收敛好的模型,使用预训练模型将pretrained设置为True即可。更改最后一层的全连接,将类别设置为2,然后将模型放到DEVICE。优化器选用Adam。
# 实例化模型并且移动到GPU
criterion = nn.CrossEntropyLoss()
model = torchvision.models.resnet18(pretrained=False)
num_ftrs = model.fc.in_features
model.fc = nn.Linear(num_ftrs, 2)
model.to(DEVICE)
# 选择简单暴力的Adam优化器,学习率调低
optimizer = optim.Adam(model.parameters(), lr=modellr)
def adjust_learning_rate(optimizer, epoch):
"""Sets the learning rate to the initial LR decayed by 10 every 30 epochs"""
modellrnew = modellr * (0.1 ** (epoch // 50))
print("lr:", modellrnew)
for param_group in optimizer.param_groups:
param_group['lr'] = modellrnew
设置训练和验证
# 定义训练过程
def train(model, device, train_loader, optimizer, epoch):
model.train()
sum_loss = 0
total_num = len(train_loader.dataset)
print(total_num, len(train_loader))
for batch_idx, (data, target) in enumerate(train_loader):
data, target = Variable(data).to(device), Variable(target).to(device)
output = model(data)
loss = criterion(output, target)
optimizer.zero_grad()
loss.backward()
optimizer.step()
print_loss = loss.data.item()
sum_loss += print_loss
if (batch_idx + 1) % 50 == 0:
print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(
epoch, (batch_idx + 1) * len(data), len(train_loader.dataset),
100. * (batch_idx + 1) / len(train_loader), loss.item()))
ave_loss = sum_loss / len(train_loader)
print('epoch:{},loss:{}'.format(epoch, ave_loss))
def val(model, device, test_loader):
model.eval()
test_loss = 0
correct = 0
total_num = len(test_loader.dataset)
print(total_num, len(test_loader))
with torch.no_grad():
for data, target in test_loader:
data, target = Variable(data).to(device), Variable(target).to(device)
output = model(data)
loss = criterion(output, target)
_, pred = torch.max(output.data, 1)
correct += torch.sum(pred == target)
print_loss = loss.data.item()
test_loss += print_loss
correct = correct.data.item()
acc = correct / total_num
avgloss = test_loss / len(test_loader)
print('\nVal set: Average loss: {:.4f}, Accuracy: {}/{} ({:.0f}%)\n'.format(
avgloss, correct, len(test_loader.dataset), 100 * acc))
# 训练
for epoch in range(1, EPOCHS + 1):
adjust_learning_rate(optimizer, epoch)
train(model, DEVICE, train_loader, optimizer, epoch)
val(model, DEVICE, test_loader)
torch.save(model, 'model.pth')这是有预训练模型的情况下训练的结果,1个epoch就已经得到很好的结果了。

验证
测试集存放的目录如下图:

第一步 定义类别,这个类别的顺序和训练时的类别顺序对应,一定不要改变顺序!!!!我们在训练时,cat类别是0,dog类别是1,所以我定义classes为(cat,dog)。
第二步 定义transforms,transforms和验证集的transforms一样即可,别做数据增强。
第三步 加载model,并将模型放在DEVICE里,
第四步 读取图片并预测图片的类别,在这里注意,读取图片用PIL库的Image。不要用cv2,transforms不支持。
import torch.utils.data.distributed
import torchvision.transforms as transforms
from torch.autograd import Variable
import os
from PIL import Image
classes = ('cat', 'dog')
transform_test = transforms.Compose([
transforms.Resize((224, 224)),
transforms.ToTensor(),
transforms.Normalize([0.5, 0.5, 0.5], [0.5, 0.5, 0.5])
])
DEVICE = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
model = torch.load("model.pth")
model.eval()
model.to(DEVICE)
path='data/test/'
testList=os.listdir(path)
for file in testList:
img=Image.open(path+file)
img=transform_test(img)
img.unsqueeze_(0)
img = Variable(img).to(DEVICE)
out=model(img)
# Predict
_, pred = torch.max(out.data, 1)
print('Image Name:{},predict:{}'.format(file,classes[pred.data.item()]))
运行结果:

其实在读取数据,也可以巧妙的用datasets.ImageFolder,下面我们就用datasets.ImageFolder实现对图片的预测。改一下test数据集的路径,在test文件夹外面再加一层文件件,取名为dataset,如下图所示:

然后修改读取图片的方式。代码如下:
import torch.utils.data.distributed
import torchvision.transforms as transforms
import torchvision.datasets as datasets
from torch.autograd import Variable
classes = ('cat', 'dog')
transform_test = transforms.Compose([
transforms.Resize((224, 224)),
transforms.ToTensor(),
transforms.Normalize([0.5, 0.5, 0.5], [0.5, 0.5, 0.5])
])
DEVICE = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
model = torch.load("model.pth")
model.eval()
model.to(DEVICE)
dataset_test = datasets.ImageFolder('data/datatest', transform_test)
print(len(dataset_test))
# 对应文件夹的label
for index in range(len(dataset_test)):
item = dataset_test[index]
img, label = item
img.unsqueeze_(0)
data = Variable(img).to(DEVICE)
output = model(data)
_, pred = torch.max(output.data, 1)
print('Image Name:{},predict:{}'.format(dataset_test.imgs[index][0], classes[pred.data.item()]))
index += 1
完整代码:
train.py
import torch.optim as optim
import torch
import torch.nn as nn
import torch.nn.parallel
import torch.optim
import torch.utils.data
import torch.utils.data.distributed
import torchvision.transforms as transforms
import torchvision.datasets as datasets
import torchvision.models
from effnetv2 import effnetv2_s
from torch.autograd import Variable
# 设置超参数
BATCH_SIZE = 16
EPOCHS = 10
DEVICE = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
# 数据预处理
transform = transforms.Compose([
transforms.Resize((128, 128)),
# transforms.RandomVerticalFlip(),
# transforms.RandomCrop(50),
# transforms.ColorJitter(brightness=0.5, contrast=0.5, hue=0.5),
transforms.ToTensor(),
transforms.Normalize([0.5, 0.5, 0.5], [0.5, 0.5, 0.5])
])
transform_test = transforms.Compose([
transforms.Resize((128, 128)),
transforms.ToTensor(),
transforms.Normalize([0.5, 0.5, 0.5], [0.5, 0.5, 0.5])
])
# 读取数据
dataset_train = datasets.ImageFolder('data/train', transform)
print(dataset_train.imgs)
# 对应文件夹的label
print(dataset_train.class_to_idx)
dataset_test = datasets.ImageFolder('data/val', transform_test)
# 对应文件夹的label
print(dataset_test.class_to_idx)
# 导入数据
train_loader = torch.utils.data.DataLoader(dataset_train, batch_size=BATCH_SIZE, shuffle=True)
test_loader = torch.utils.data.DataLoader(dataset_test, batch_size=BATCH_SIZE, shuffle=False)
modellr = 1e-4
# 实例化模型并且移动到GPU
criterion = nn.CrossEntropyLoss()
# model = effnetv2_s()
# num_ftrs = model.classifier.in_features
# model.classifier = nn.Linear(num_ftrs, 2)
model = torchvision.models.resnet18(pretrained=False)
num_ftrs = model.fc.in_features
model.fc = nn.Linear(num_ftrs, 2)
model.to(DEVICE)
# 选择简单暴力的Adam优化器,学习率调低
optimizer = optim.Adam(model.parameters(), lr=modellr)
def adjust_learning_rate(optimizer, epoch):
"""Sets the learning rate to the initial LR decayed by 10 every 30 epochs"""
modellrnew = modellr * (0.1 ** (epoch // 50))
print("lr:", modellrnew)
for param_group in optimizer.param_groups:
param_group['lr'] = modellrnew
# 定义训练过程
def train(model, device, train_loader, optimizer, epoch):
model.train()
sum_loss = 0
total_num = len(train_loader.dataset)
print(total_num, len(train_loader))
for batch_idx, (data, target) in enumerate(train_loader):
data, target = Variable(data).to(device), Variable(target).to(device)
output = model(data)
loss = criterion(output, target)
optimizer.zero_grad()
loss.backward()
optimizer.step()
print_loss = loss.data.item()
sum_loss += print_loss
if (batch_idx + 1) % 50 == 0:
print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(
epoch, (batch_idx + 1) * len(data), len(train_loader.dataset),
100. * (batch_idx + 1) / len(train_loader), loss.item()))
ave_loss = sum_loss / len(train_loader)
print('epoch:{},loss:{}'.format(epoch, ave_loss))
def val(model, device, test_loader):
model.eval()
test_loss = 0
correct = 0
total_num = len(test_loader.dataset)
print(total_num, len(test_loader))
with torch.no_grad():
for data, target in test_loader:
data, target = Variable(data).to(device), Variable(target).to(device)
output = model(data)
loss = criterion(output, target)
_, pred = torch.max(output.data, 1)
correct += torch.sum(pred == target)
print_loss = loss.data.item()
test_loss += print_loss
correct = correct.data.item()
acc = correct / total_num
avgloss = test_loss / len(test_loader)
print('\nVal set: Average loss: {:.4f}, Accuracy: {}/{} ({:.0f}%)\n'.format(
avgloss, correct, len(test_loader.dataset), 100 * acc))
# 训练
for epoch in range(1, EPOCHS + 1):
adjust_learning_rate(optimizer, epoch)
train(model, DEVICE, train_loader, optimizer, epoch)
val(model, DEVICE, test_loader)
torch.save(model, 'model.pth')
test1.py
import torch.utils.data.distributed
import torchvision.transforms as transforms
from torch.autograd import Variable
import os
from PIL import Image
classes = ('cat', 'dog')
transform_test = transforms.Compose([
transforms.Resize((224, 224)),
transforms.ToTensor(),
transforms.Normalize([0.5, 0.5, 0.5], [0.5, 0.5, 0.5])
])
DEVICE = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
model = torch.load("model.pth")
model.eval()
model.to(DEVICE)
path='data/test/'
testList=os.listdir(path)
for file in testList:
img=Image.open(path+file)
img=transform_test(img)
img.unsqueeze_(0)
img = Variable(img).to(DEVICE)
out=model(img)
# Predict
_, pred = torch.max(out.data, 1)
print('Image Name:{},predict:{}'.format(file,classes[pred.data.item()]))
test2.py
import torch.utils.data.distributed
import torchvision.transforms as transforms
import torchvision.datasets as datasets
from torch.autograd import Variable
classes = ('cat', 'dog')
transform_test = transforms.Compose([
transforms.Resize((224, 224)),
transforms.ToTensor(),
transforms.Normalize([0.5, 0.5, 0.5], [0.5, 0.5, 0.5])
])
DEVICE = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
model = torch.load("model.pth")
model.eval()
model.to(DEVICE)
dataset_test = datasets.ImageFolder('data/datatest', transform_test)
print(len(dataset_test))
# 对应文件夹的label
for index in range(len(dataset_test)):
item = dataset_test[index]
img, label = item
img.unsqueeze_(0)
data = Variable(img).to(DEVICE)
output = model(data)
_, pred = torch.max(output.data, 1)
print('Image Name:{},predict:{}'.format(dataset_test.imgs[index][0], classes[pred.data.item()]))
index += 1
相关文章
- 手把手教你训练自己的Mask R-CNN图像实例分割模型(PyTorch官方教程)
- 从零开始学Pytorch(七)之卷积神经网络基础
- 从零开始学Pytorch(十二)之凸优化
- 从零开始学Pytorch(三)之多层感知机的实现
- 【干货书】深度强化学习Python实战:算法的简洁实现,简化数学,以及TensorFlow和PyTorch的使用
- OHEM的pytorch代码实现细节
- PyTorch学习系列教程:构建一个深度学习模型需要哪几步?
- PyTorch学习系列教程:Tensor如何实现自动求导
- cnn lstm pytorch_pytorch怎么用
- mse pytorch_torch和pytorch
- 工业应用中如何选取合适的损失函数(MAE、MSE、Huber)-Pytorch版
- pytorch 构建神经网络
- PyTorch 实现 ResNet34 分类(数据cifar10)「建议收藏」
- ResNet34学习笔记+用pytorch手写实现
- 用少于256KB内存实现边缘训练,开销不到PyTorch千分之一
- Windows 版的3D目标检测框架 smoke PyTorch 实现
- PyTorch如何实现多层全连接神经网络
- 使用PyTorch实现简单的AlphaZero的算法(3):神经网络架构和自学习
- 100行Pytorch代码实现三维重建技术神经辐射场 (NeRF)
- 让PyTorch创始人直呼「Amazing」的视频「脑补」,动态场景NeRF合成速度提升百倍
- 利用pytorch实现图像识别demo
- 200+机器学习竞赛最全分析:超550万美元总奖金,人人都用PyTorch,2070也能夺冠!
- 基于PyTorch,集合17种方法,南京大学等提出小样本算法库LibFewShot
- 有bug!用Pytorch Lightning重构代码速度更慢,修复后速度倍增
- PyTorch-Nightly 受到供应链攻击,导致数据和文件泄露