
基于粒子群算法(PSO)的路径规划问题研究 (Matlab代码实现)
2023-09-14 09:05:20 时间
目录
1 概述
最早科学家发现生物群体存在着某种有规律的趋利避害和活动觅食的生命活动,像鸟类、鱼群的觅食活动,蜂群的种族繁衍活动,狮群的家庭捕食行动等等,诸如此类的生物活动后来被联想到解决工程学上比较复杂的最优解问题,如比较复杂的电网规划求解,灌溉管道铺设路径最优化求解和建筑高楼的造价最优值。 大家比较熟悉的有遗传算法(BA)(上世纪六七十年代),粒子群算法(1995)和差分进化算法(1995)。
2 粒子群算法简介
粒子群算法1995年由J. Kennedy和R. C. Eberhart提出的一种智能计算的算法,以高速,整洁,求解精度高的特点迅速广为人知。 粒子群算法的提出也造就了学术界的诸多人物,很多学位的论文都会围绕粒子群算法的优化改进。 原理核心是“迭代进化,适者生存”。粒子群优化算法是一种新型群智能优化算法,因其概念简单,参数较少,容易实现等优点,使其获得了国内外众多研究人员的青睐,现已被广泛应用在函数优化、自动控制、机器学习、工程设计等领域。但由于 PSO 算法仍在发展中,其理论基础以及改进方法和应用领域还需要进一步的研究和拓展。
3 问题分析
路径规划是移动机器人导航最基本环节之一 ,它是按照某一性能指标 (如路径最短 、使用时间最 短或消耗能量最少等)搜索一条从起始状态到目标状态的最优或近似最优的无碰撞路径。传统的路径规划算法如势场法 、可视图法、遗传算法等,自身都存在一定的缺陷,使得路径搜索出现计算量过大 、效率不高 、寻优能力差等问题 ,保证不了对路径规划的计算效率和可靠性要求。
粒子群优化算法 (ParticleSwarm Optimization,简称 PSO)是一种进化计算技术 ,同遗传算法类似,是一种基于迭代的优化工具 ,通过迭代搜寻最优值 。同遗传算法相比, PSO的优势在于简单、容易实现并且许多参数不需要调整。神经网络作为一个高度并行的分布式系统,为解决机器人系统的高实时性问题提供了可能性 ,并应用于智能自主移动机器人导航与路径规划等方面。
4 基本原理
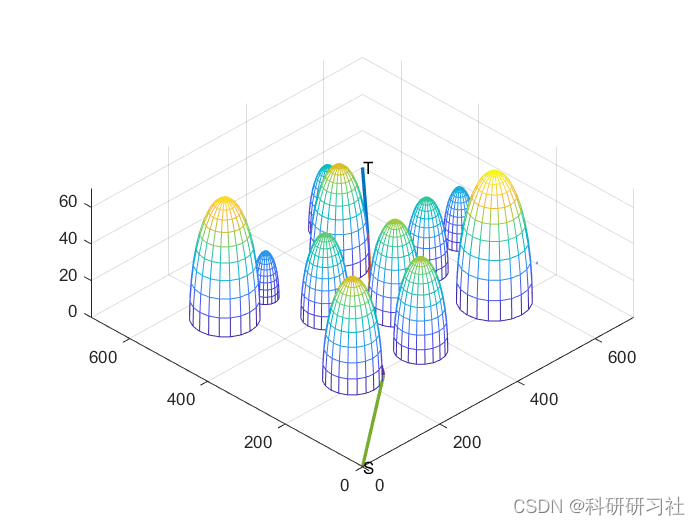
为了解决传统路径规划算法存在的问题 ,本文采用一种新的智能算法进行路径规划 ,首先采用神经网络训练碰撞罚函数 ,得到无碰撞路径 ,然后采用粒子群优化算法解决路径的最优问题 。
5 运行结果
clear all
clc
% for o=1:4
tic
% for u=1:50
%% 设置各参数值
startX=0;startY=0; %起开始坐标
endX=700;endY=700; %结束坐标
c1=2;
c2=2; %学习因子
w=0.7; %惯性权数
pop=20; %粒子数
N_gen=500;
popmax=700;
popmin=0; %位置范围,根据测试函数而定
Vmax=20;
Vmin=-20; %速度范围,根据测试函数而定
gridCount=30;
%% 生成山峰
threat=[304 400 0;404 320 0;440 500 0;279 310 0;560 220 0;172 527 0;....
194 220 0;272 522 0;350 200 0;....
650 400 0;740 250 0;540 375 0;510 600 0];
r=[45 50 55 10 70 65 55 25 50 30 40 40 35];
for i=1:length(r)
figure(1)
[x,y,z]=sphere;
mesh(threat(i,1)+r(i)*x,threat(i,2)+r(i)*y,abs(threat(i,3)+r(i)*z));
hold on
end
view([-30,-30,70])
%% 初始化粒子
for i=1:pop
for j=1:gridCount
X(i,j)=startX+j*(endX-startX)/(gridCount+1);
Y(i,j)=startY+rand()*(endY-startY);
path(i,2*j-1)=X(i,j);
path(i,2*j)=Y(i,j);
end
end
for i=1:pop
[distance,pathpoint,positionPoint]=verify(path(i,:),threat,....
r,startX,startY,endX,endY,gridCount);
fitness(i)=distance;
V(i,:)=5*rands(1,gridCount*2); %分布在速度范围内
end
[bestFitness,bestindex]=min(fitness);
bestpath=path(bestindex,:);
pbest=path;
T=std(fitness);
BestFitness=Inf;
globalFitness=Inf;
pathRecord=zeros(1,gridCount+1); bestRecord=zeros(1,gridCount+1);
position=zeros(gridCount+1,2);
%% 迭代取优
for i=1:N_gen
for j=1:pop
V(j,:)=w*V(j,:)+c1*rand*(pbest(j,:)-path(j,:))+c2*rand*(bestpath-path(j,:)); %根据公式更新速度
V(j,find(V(j,:)>Vmax))=Vmax; %限制速度大小
V(j,find(V(j,:)<Vmin))=Vmin;
path(j,:)=path(j,:)+V(j,:); %根据公式更新位置
path(j,find(path(j,:)>popmax))=popmax; %限制位置大小
path(j,find(path(j,:)<popmin))=popmin;
[distance,pathpoint,positionPoint]=verify(path(j,:),threat,....
r,startX,startY,endX,endY,gridCount);
fmin=distance;
if fmin<fitness(j)
fitness(j)=fmin; %更新个体最优适应度
pbest(j,:)=path(j,:); %更新个体最优值
end
if fmin<bestFitness
bestFitness=fmin; %更新全局最优适应度
bestpath=path(j,:); %更新全局最优值
pathRecord=pathpoint;
position=positionPoint;
end
end
Fmin(i)=bestFitness;
end
% end
% end
%% 画出实体图
record=[];
count=1;
i=gridCount+1;
while i>1
j=pathRecord(i);
record(count,1)=position(i,1); record(count,2)=position(i,2);
count=count+1;
plot([position(i,1),position(j,1)],[position(i,2),position(j,2)],'Linewidth',2)
axis([0,700,0,700]);
i=j;
end
record(count,1)=position(i,1); record(count,2)=position(i,2);
text(position(1,1)',position(1,2)','S');
text(position(gridCount+1,1)',position(gridCount+1,2)','T');
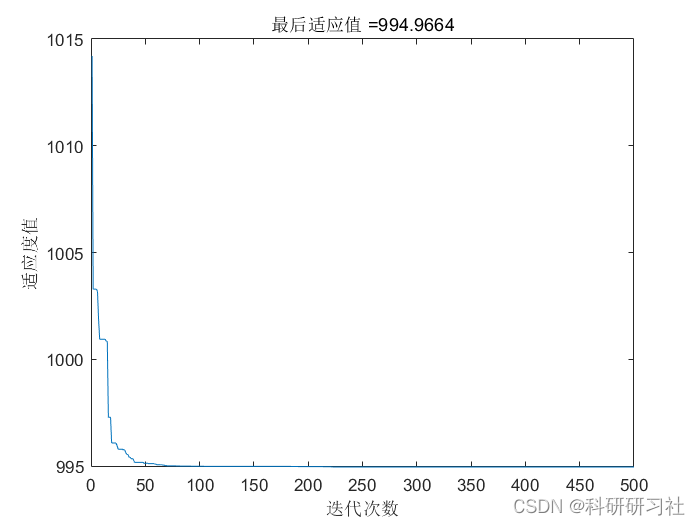
figure(2)
plot(Fmin);
% title(['最佳个体适应度变化趋势,最佳适应值=' num2str(BestFitness)])
title(['最后适应值 =' num2str(min(Fmin))]);
xlabel('迭代次数')
ylabel('适应度值')
%% 分析结果
% plot(yy);
% title(['适应度曲线 最优适应度值:' num2str(yy(500))]);
% xlabel('进化次数');
% ylabel('适应度');部分理论引用网络文献,如有侵权请联系删除。
6 参考文献
[1]白晓兰,周文全,张振朋,袁铮.基于启发式粒子群算法的机器人平滑路径规划[J].组合机床与自动化加工技术,2022(08):44-47+52.DOI:10.13462/j.cnki.mmtamt.2022.08.011.
[2]屈文婷. 基于粒子群算法及RBF神经网络技术的粮食产量预测方法[D].河南师范大学,2016.
[3]吴高超. 基于粒子群算法的路径规划问题研究[D].燕山大学,2016.
7 Matlab代码实现
相关文章
- matlab画cdf曲线_条形图和直方图的联系
- matlab图像处理初步,MATLAB数字图像处理初步「建议收藏」
- matlab运算放大器概述,运算放大器概述「建议收藏」
- BP神经网络预测matlab代码讲解与实现步骤
- matlab中错误使用fmincon,MATLAB中fmincon 函数问题
- Matlab fitrsvm自带支持向量回归[通俗易懂]
- matlab中如何求插值点,MATLAB插值「建议收藏」
- 【matlab】如何画分段函数的图像[通俗易懂]
- matlab interp1db,matlab – Matlab interp1图出现数据偏移 – 堆栈内存溢出
- MATLAB 8.1 R2013a license.lic 问题
- MATLAB好玩的代码_Matlab代码
- zigzag扫描matlab,ZIGZAG扫描的MATLAB实现
- butterworth matlab,Matlab实现Butterworth滤波器
- matlab plot函数详解_MATLAB的plot
- MATLAB的循环_matlab循环输出
- matlab循环语句for_MATLAB以下选择语句错误的是
- MATLAB 数学应用 微分方程 时滞微分方程 具有常时滞的DDE「建议收藏」
- 商业数学软件Matlab最新中文版,Matlab软件2023安装教程下载
- 【数字信号处理】卷积编程实现 ( Matlab 卷积和多项式乘法 conv 函数 | 使用 matlab 代码求卷积并绘图 )
- Matlab安装教程
- Matlab与MySQL:极具价值的组合(matlab与mysql)