
基于无人机的气象数据采集系统设计(Matlab代码实现)
👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
人工影响天气业务在防灾减灾工作中越来越受到重视,并且技术也愈加完善。但是人工降雨一般是以飞机播撒催化剂的方式实现增雨、降雨。人工降雨对气象条件及空气质量有前提条件,对机上指挥人员也有危险性。所以,利用无人机实现自动播撒,自动观测,可以很好地解决安全性的问题。该文主要研究基于无人机的气象数据采集系统的设计,设计无人机气象数据采集的硬件和程序。温度和湿度传感器、气压传感器和HGPS传感器分别用于传输观测数据。传输的数据从控制器写入,进入SD卡然后存储,通过无线数据传输模块,发送到地面主处理计算机进行实时显示。
📚2 运行结果
部分代码:
close, clear, clc
format long
outfile = false;
plotdata = true;
date = '18-11-02';
log_file = 'DATA01.CSV';
pix_file = '2018-11-02 16-00-07.bin-61468.mat';
% pix_file = '2018-08-22 11-30-26.bin-101613.mat';
% date = '18-08-22';
% log_file = 'DATA05.CSV';
LUT_MET = 'MET_LUT.csv';
LUT_UCASS = 'LUT_D_water.txt';
density = 997000000;
PIXdat = PIXextract(date,pix_file);
[time_met,tfit,hfit] = calMET(date,LUT_MET,log_file);
[METrt,PIXrt] = RTCzero(log_file,pix_file,date);
alt = time2alt(PIXdat,METrt,PIXrt);
met = [time_met,alt];
met(:,2) = run_filter(met(:,2),2,20,10);
[bb,counts] = calUCASS(date,LUT_UCASS,log_file);
mass_conc = UCASSmass_conc(counts,bb,met(:,5),density);
met = [met,mass_conc];
metdat = metstruct(met);
[profiles,pindex] = detect_profile(metdat);
altitudes = [10,50,70,100,120];
slicestruct = sliceData(profiles,altitudes,pindex,counts);
intParams = colint(profiles);
if outfile == true
genfile('SAM_DATA',log_file,pix_file,date,profiles);
end
if plotdata == true
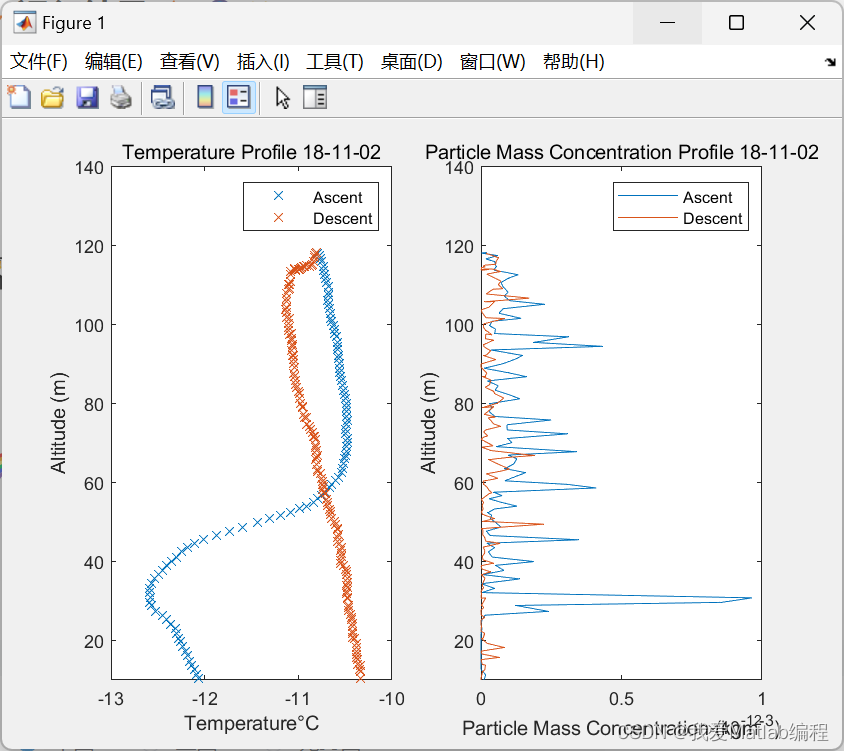
fig = figure(1);
ax1 = subplot(1,2,1);
tln1 = plot([profiles.profile_1.temperature],[profiles.profile_1.altitude],'x');
hold on
tln2 = plot([profiles.profile_2.temperature],[profiles.profile_2.altitude],'x');
hold on
ylim([10,140])
xlabel(sprintf('Temperature%cC',char(176)));
ylabel('Altitude (m)');
title(['Temperature Profile ',date])
legend(ax1,{'Ascent','Descent'},'Location','northeast')
ax2 = subplot(1,2,2);
mln1 = plot([profiles.profile_1.particle_mass_conc],[profiles.profile_1.altitude]);
hold on
mln2 = plot([profiles.profile_2.particle_mass_conc],[profiles.profile_2.altitude]);
hold on
ylim([10,140])
xlabel('Particle Mass Concentration (kgm^-^3)');
ylabel('Altitude (m)');
title(['Particle Mass Concentration Profile ',date])
legend(ax2,{'Ascent','Descent'},'Location','northeast')
hold off
end
🌈3 Matlab代码实现
🎉4 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]李俊杰,霍宗钰.气象探测无人机及保护装置结构设计[J].电子技术与软件工程,2022(14):80-83.
相关文章
- 数学建模暑期集训5:matlab求解常微分方程/偏微分方程
- matlab 泊松曲面重建法
- matlab 点云中值滤波
- 【目录】Matlab和C#混合编程文章目录
- 智能优化算法——澳洲野狗优化算法(Matlab实现)
- 数据驱动的两阶段分布鲁棒(1-范数和∞-范数约束)的电热综合能源系统研究(Matlab代码实现)
- 配电系统的线性三相潮流(Matlab实现)
- 一种面向多通道系统的滤波x仿射投影符号算法(Matlab代码实现)
- 基于Elman神经网络质量阻尼弹簧系统的研究(Matlab代码实现)
- 改进极坐标表示(MPR)中AOA定位的特征空间解和偏置减少解(Matlab代码实现)
- 基于粒子群优化算法在配电系统中优化电容器的配置以降低损耗(Matlab代码实现)
- 【雷达通信】SAR雷达系统反设计及典型目标建模与仿真实现研究——目标生成与检测(Matlab代码实现)
- 分数阶混沌系统的数值解研究(Matlab代码实现)
- 【信号处理】基于优化算法的 SAR 信号处理(Matlab代码实现)
- 【MATLAB】信号与系统 — 利用 DFT 来近似余弦信号的 FT
- m扩频通信系统在瑞利信道中的误码率性能matlab仿真
- m基于rbf神经网络和遗传算法优化的MIMO-OFDM系统信道估计算法matlab仿真
- 【雷达通信】滤波及数据融合【滤波包括了常增益滤波、卡尔曼(Kalman)滤波和扩展卡尔曼滤波(EKF) 数据融合采用BC和CC两种,基于KF和EKF实现】(Matlab代码实现)