
基于RRT算法的最优动力学路径规划(Matlab代码实现)
👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
RRT是Steven M. LaValle和James J. Kuffner Jr.提出的一种通过随机构建Space Filling Tree实现对非凸高维空间快速搜索的算法。该算法可以很容易的处理包含障碍物和差分运动约束的场景,因而广泛的被应用在各种机器人的运动规划场景中。
RRT 的一个弱点是难以在有狭窄通道的环境找到路径。因为狭窄通道面积小,被碰到的概率低,找到路径需要的时间要看运气了。下图展示的例子是 RRT 应对一个人为制作的很短的狭窄通道,有时RRT很快就找到了出路,有时则一直被困在障碍物里面。
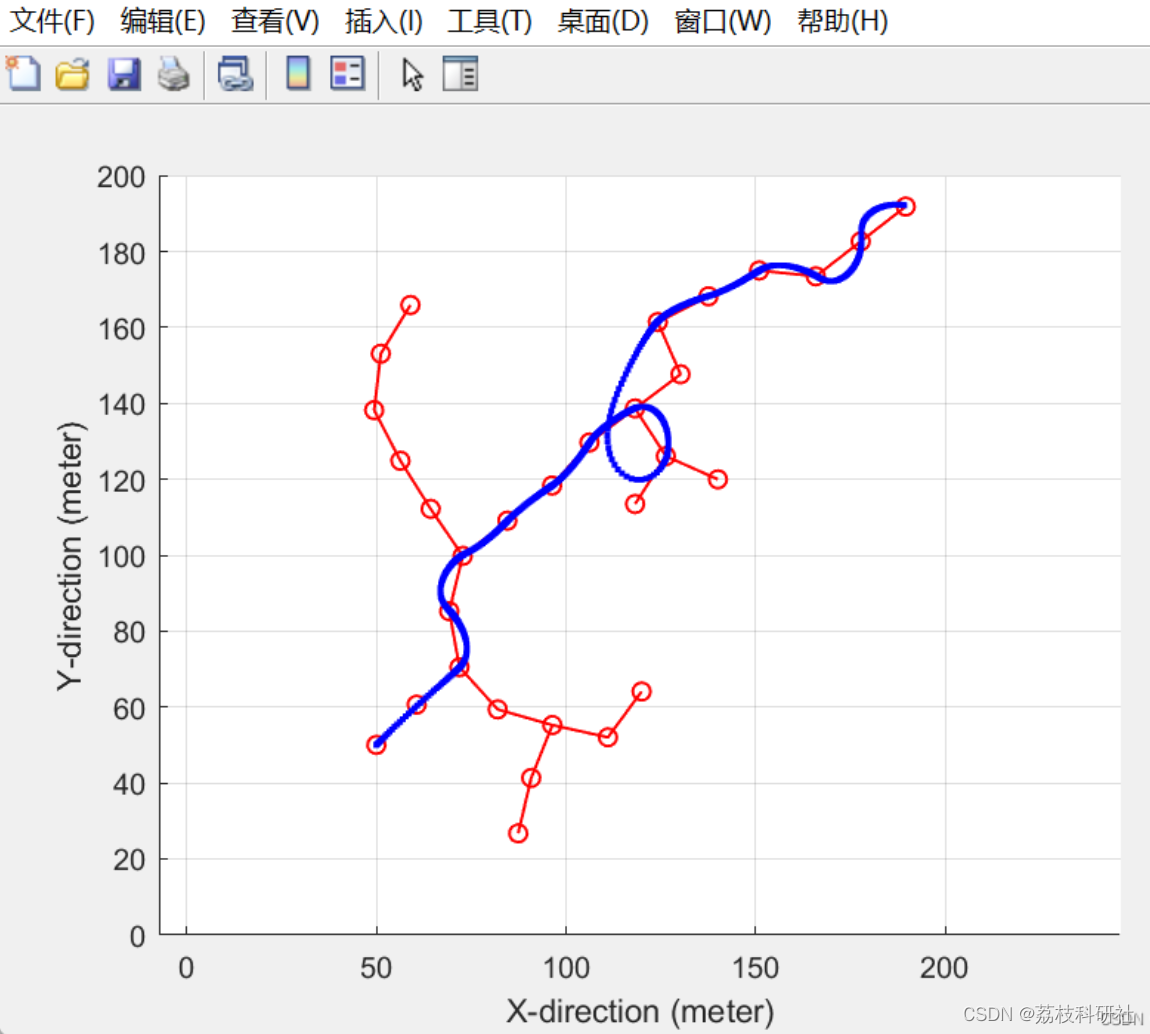
📚2 运行结果
部分代码:
clc
clear all
close all
clf
%% ----------- Simulation Setup -----------%
simulation = Simulation;
setSim(simulation, 0.2, 0, 200, 0.5);
%% ----------- Environment Setup ------------%
environment = Environment;
setBound(environment,[0 200 0 200]);
dispField(environment);
%% ----------- Vehicle Setup ------------%
vehicle = Vehicle;
setTalos(vehicle);
setInitialVehicleState(vehicle,[50 50 0.25*pi 0],[0 0 0 0],[0 0 0 0]);
dispVehicle(vehicle);
%% ------------ Look Ahead Point Setup --------------%
control = Control;
setLookAheadDistance(control,vehicle);
setControlTalos(control);
%% --------------- PID Setup ---------------%
setPID(control,0.2,0.04,0);
%% --------------- Algorithm Proceeding ---------------%
%
% evaluateSim(simulation, environment, vehicle, control)
%% ------------ RRT Test -------------%
rrtPlanner = RRTPlanner;
setRRT(rrtPlanner,vehicle)
TreeExpansion(rrtPlanner,environment,vehicle, control,simulation)
%% --------------- Result Plotting ----------------%
% PlotVehicleTrajectory(vehicle);
dt = simulation.deltaT;
Speed = vehicle.hisSpeed;
Vel = vehicle.hisVel(:,1:2);
for i=1:length(vehicle.hisSpeed); VelCar(i) = norm(Vel(i,:));end
VelCmd = control.hisRefVel;
Time=0:dt:(length(vehicle.hisSpeed)-1)*dt;
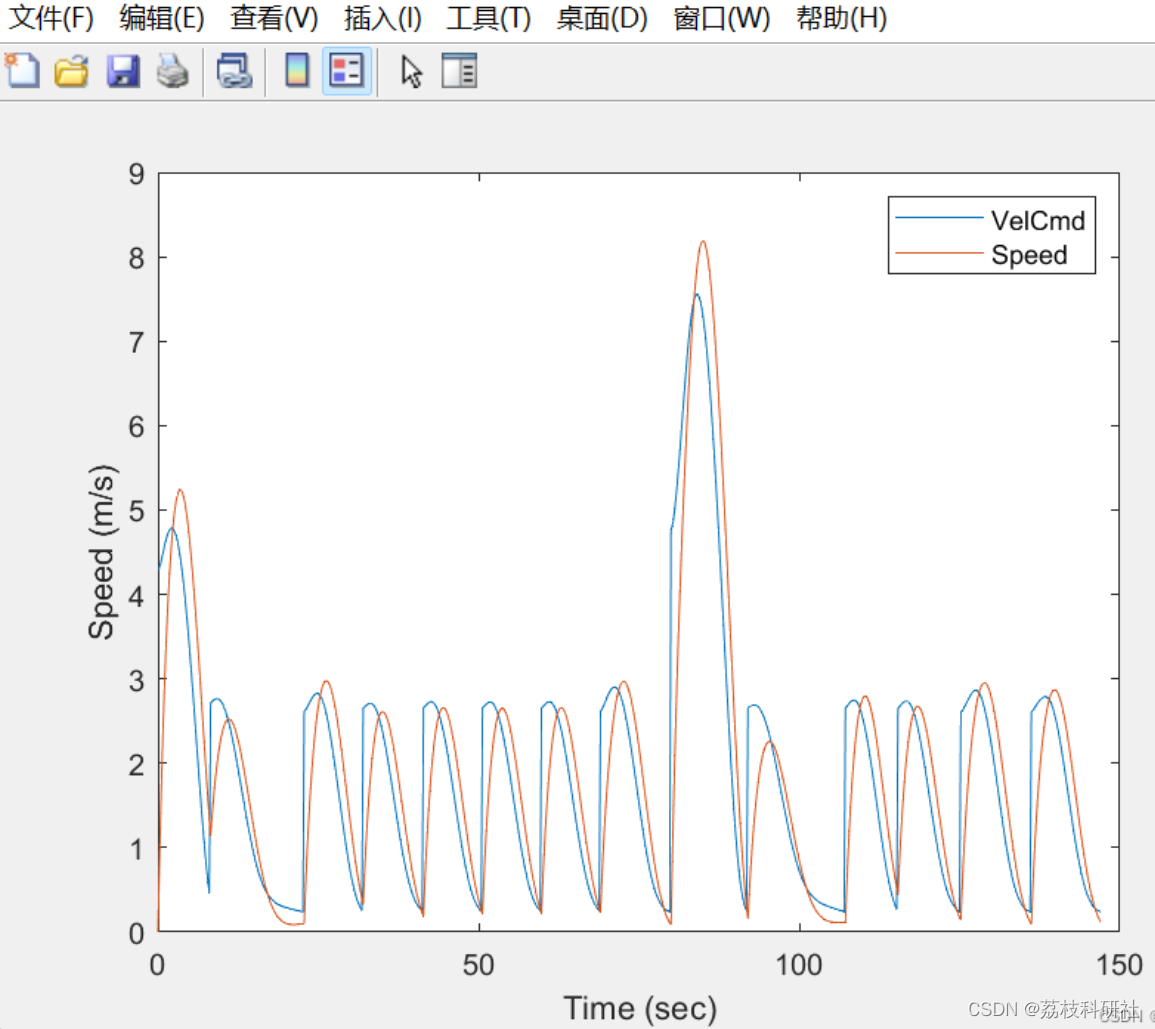
figure(2)
plot(Time,VelCmd,Time,Speed);
legend('VelCmd','Speed');xlabel('Time (sec)');ylabel('Speed (m/s)');
% figure(3)
% plot(Time,Speed,Time,VelCar);
% legend('Speed','VelCar');xlabel('Time (sec)');ylabel('Speed (m/s)');
% figure(3);plot(vehicle.hisPos(:,1),vehicle.hisPos(:,2),'r');axis([-100 100 -100 100])
% figure(2);plot(Time,Vel,Time,VelCmd);legend('Vel','VelCmd');xlabel('Time (sec)');ylabel('Speed (m/s)');
% figure(3);plot(Time,Vel,Time,Speed);legend('Vel','Speed');xlabel('Time (sec)');ylabel('Speed (m/s)');
🌈3 Matlab代码实现
🎉4 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]樵永锋,王瀚鑫,周淑文,杨贵军.改进RRT算法的无人驾驶车辆路径规划研究[J/OL].机械设计与制造:1-8[2022-12-06].DOI:10.19356/j.cnki.1001-3997.20221103.046.
相关文章
- matlab图像处理初步,MATLAB数字图像处理初步「建议收藏」
- matlab griddata nan,请教Matlab的griddata的用法
- MATLAB实现线性插值interp1的功能
- 如何用matlab编写分段函数_请教各位怎样用matlab定义一个分段函数MATLAB分段函数…[通俗易懂]
- matlab绘制论文折线图
- matlab中axis的使用
- matlab画图标签,Matlab绘图
- matlab的解决反复激活问题的license.lic文件[通俗易懂]
- MATLAB求解线性规划(含整数规划和0-1规划)问题[通俗易懂]
- matlab矩阵求逆矩阵非方阵_matlab验证逆矩阵出问题
- LaTeX求和符号_matlab中求和符号怎么表示
- MATLAB好玩的代码_Matlab代码
- matlab将txt数据分类,MATLAB读取txt文件,txt里面有字符串和数值两种类型
- Matlab之正态拟合直方图绘制函数histfit
- Matlab 直方图_matlab分析
- MATLAB R2021b for Mac(可视化数学分析软件)中文版
- 数学函数图像处理_matlab基本图像处理
- MATLAB循环_matlab如何循环计算
- matlab 汽车振动,基于MatLab的车辆振动响应幅频特性分析
- Matlab循环语句_matlab中if语句的用法
- Matlab函数定义_matlab子函数
- MATLAB中的马尔可夫区制转移(Markov regime switching)模型|附代码数据
- matlab数据如何利用MongoDB管理MATLAB数据?(mongodb管理)