
【路径规划】一种越野环境下车辆驾驶风险规避运动规划算法(Matlab代码实现)
👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
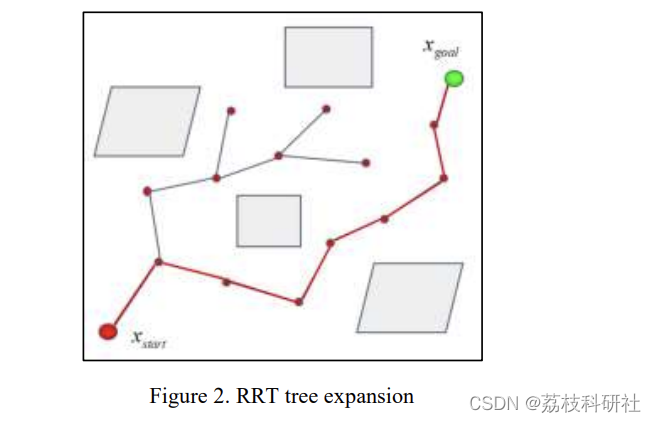
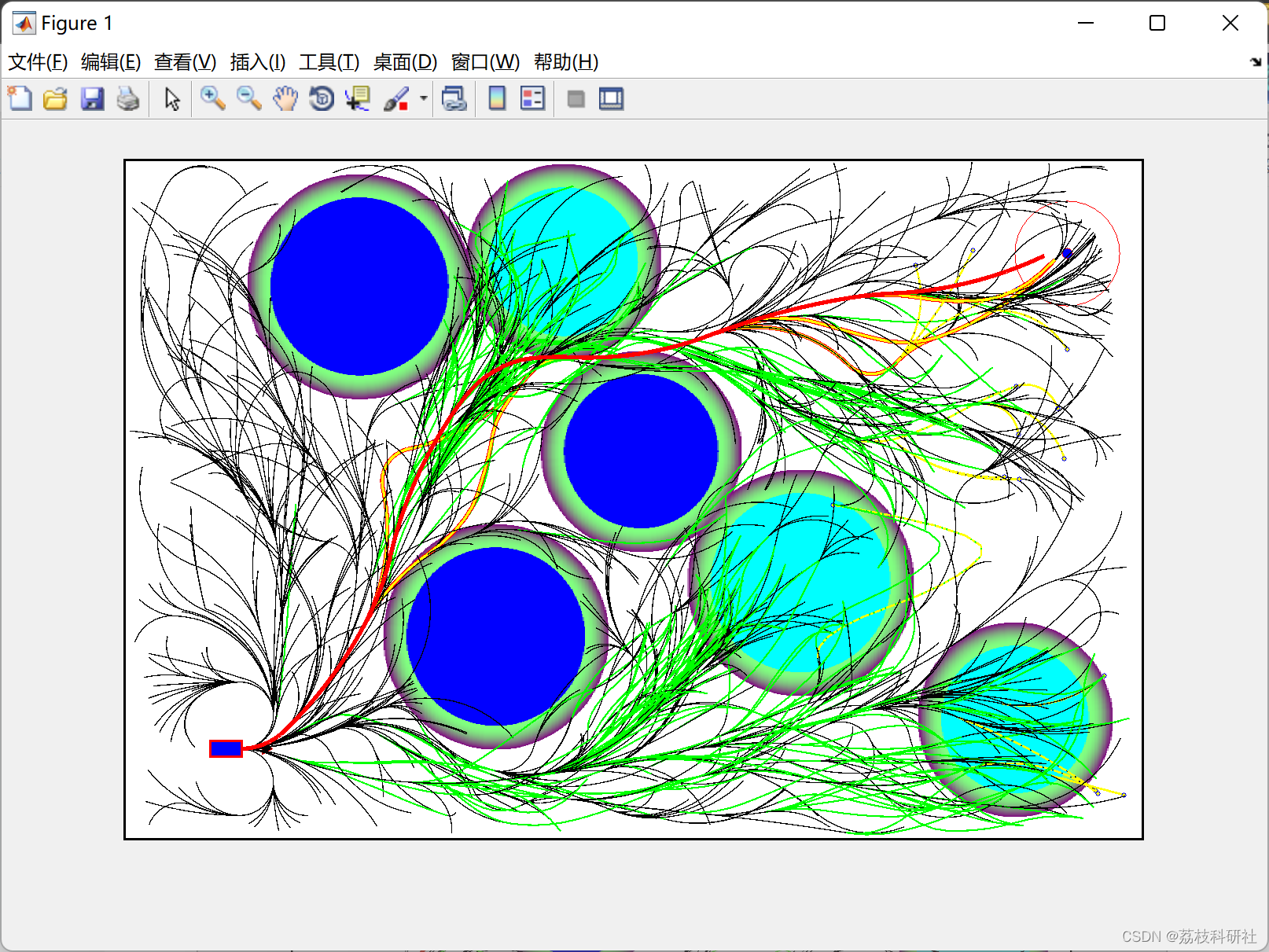
RRT算法生长并维护一棵树,树的每个节点都是工作空间中的一个节点(状态)。算法所探索的区域即为树所占据的区域。算法最初以一棵以起始节点为唯一节点的树开始。在每次迭代时,通过选择一个随机状态并向该状态扩展树来扩展树。扩展是通过将树中距离最近的节点向选定的随机状态扩展一小步来完成的,如图2所示。算法运行,直到某个扩展使树足够靠近目标。
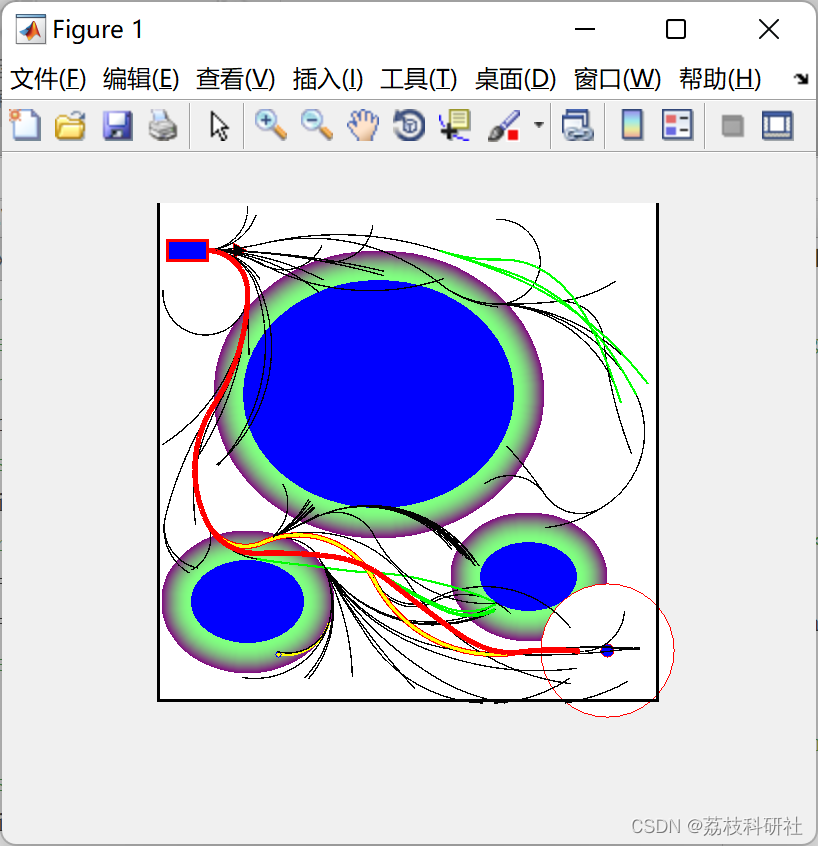
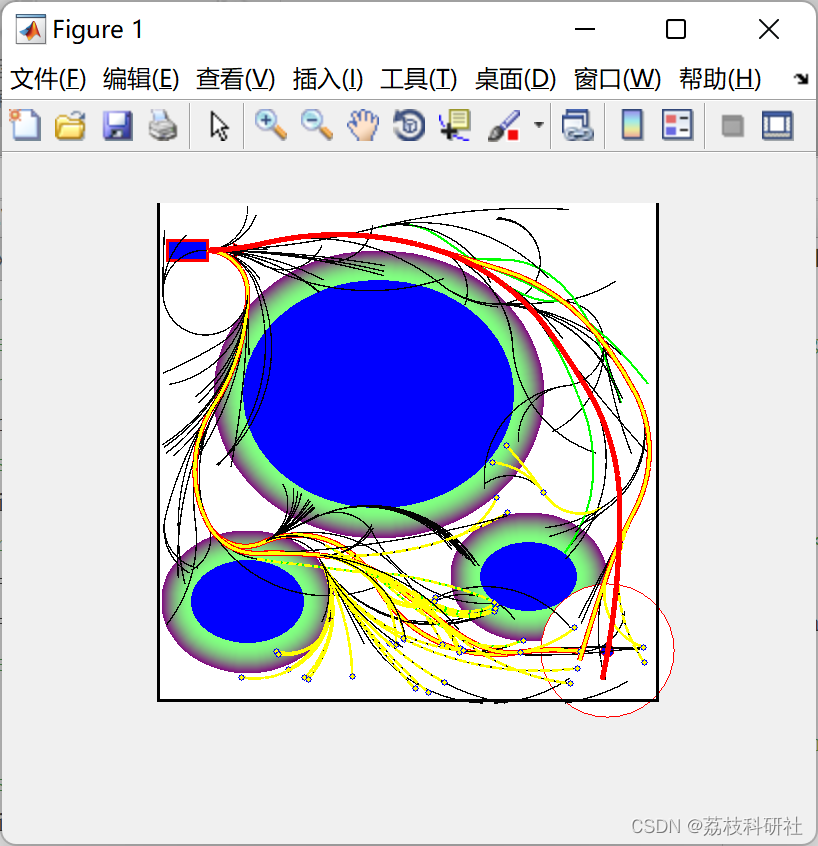
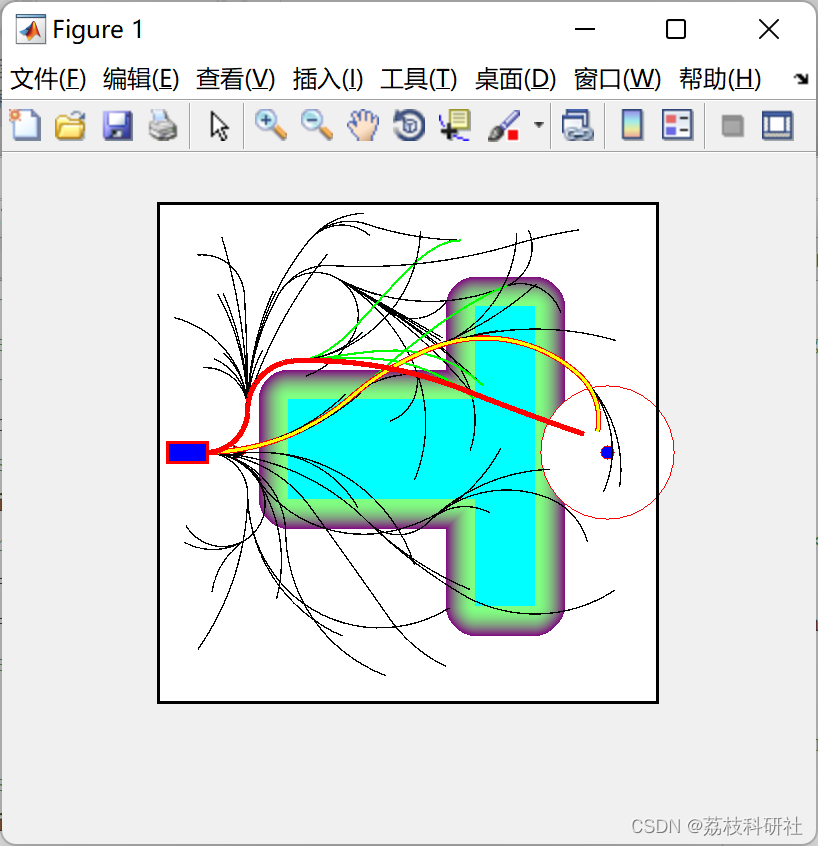
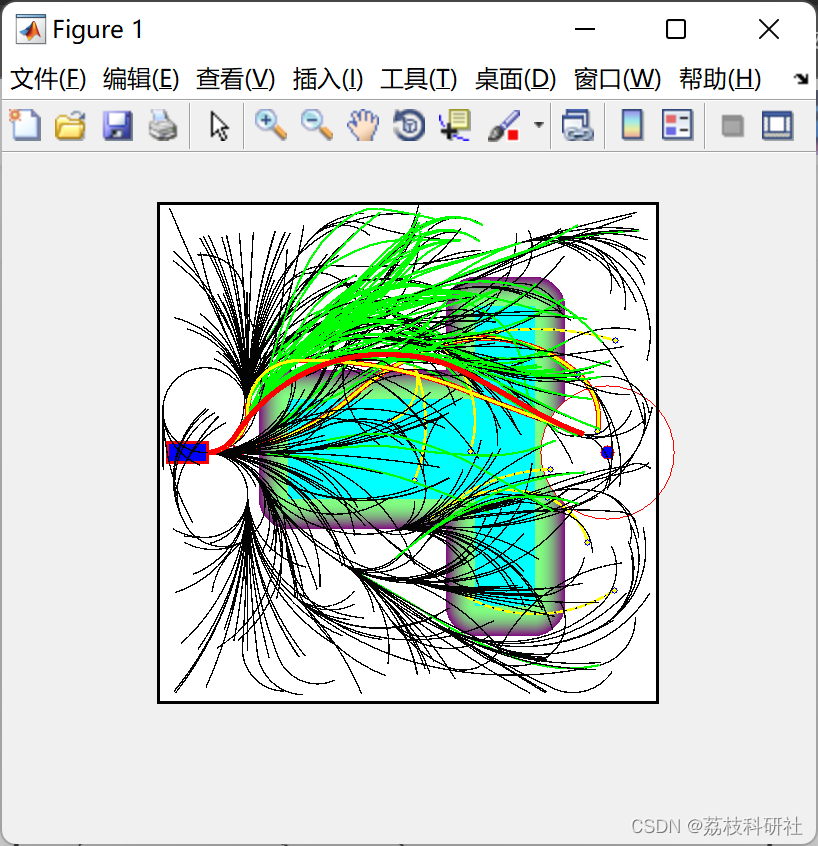
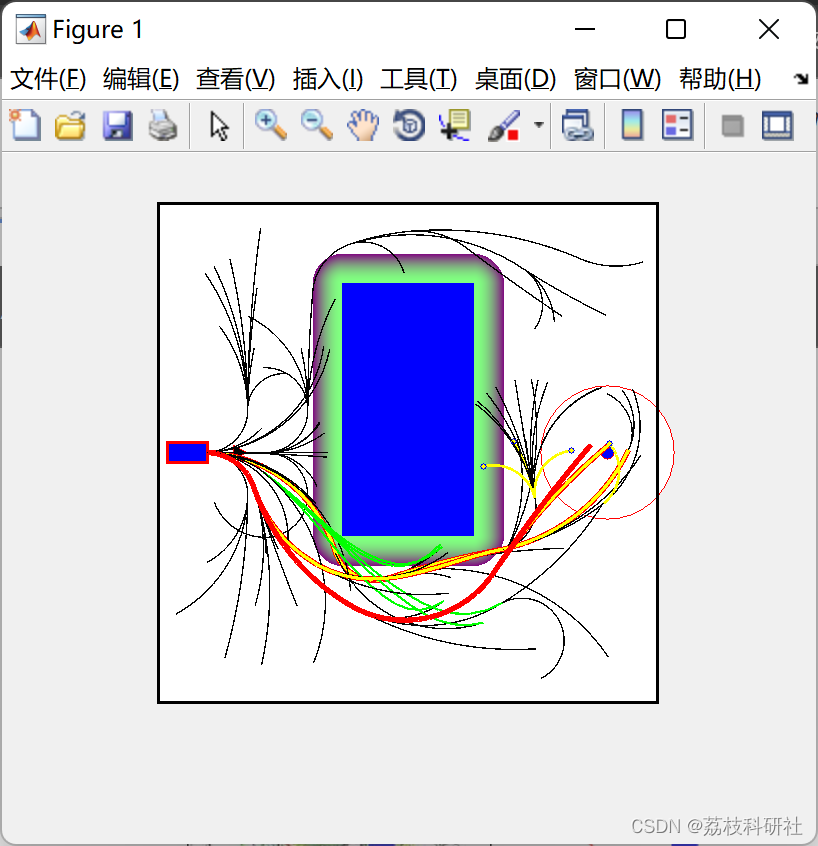
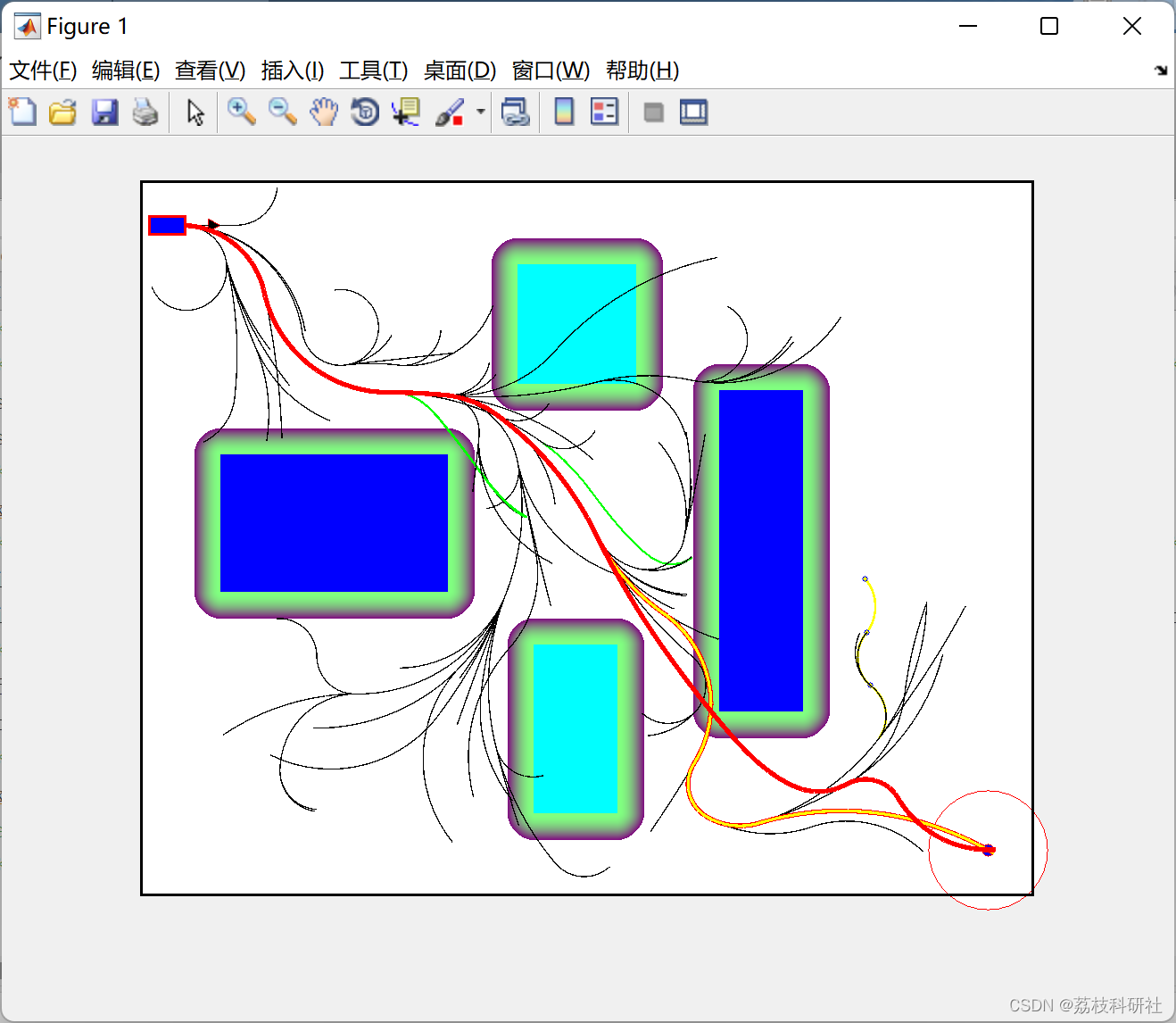
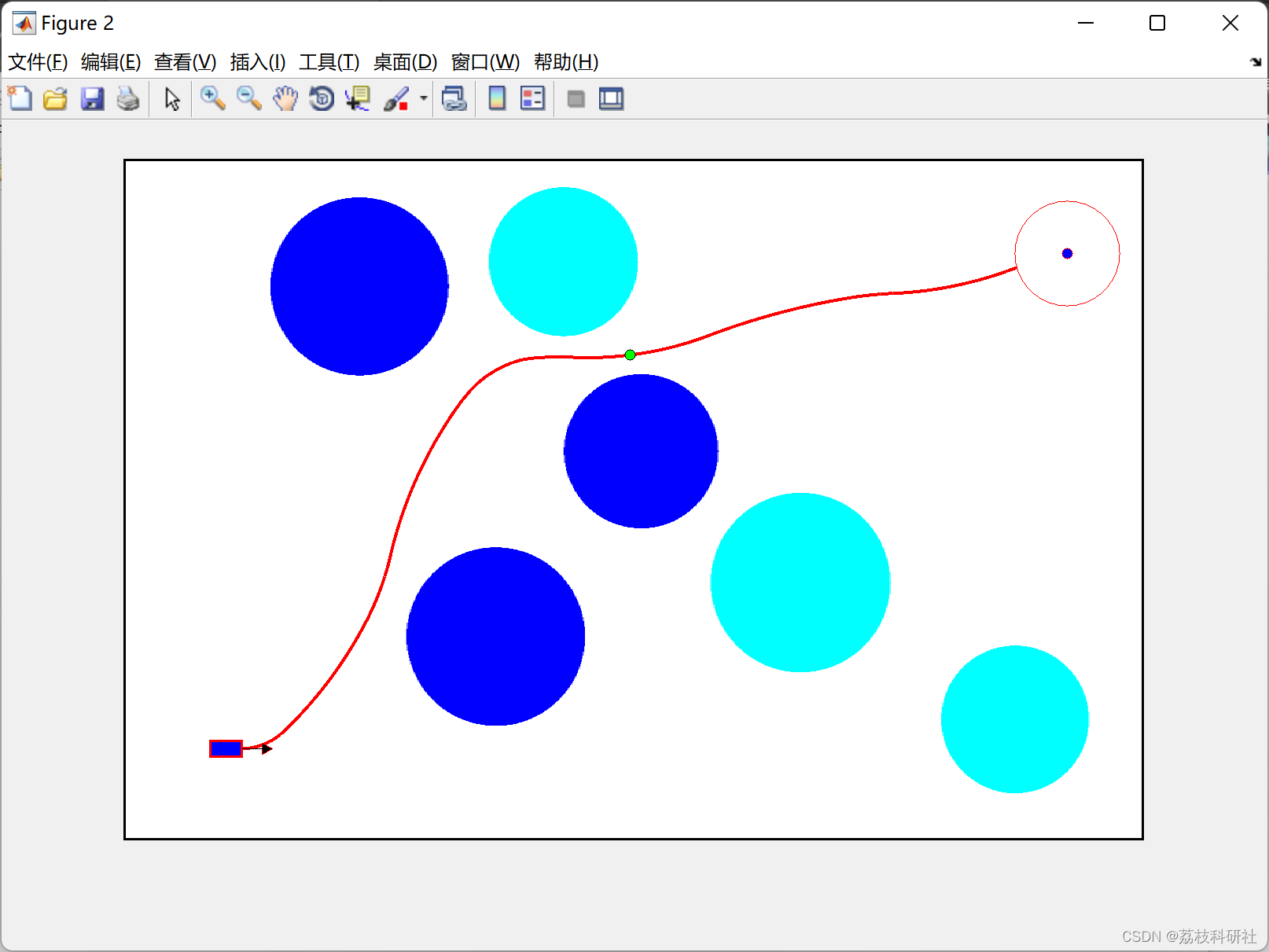
📚2 运行结果
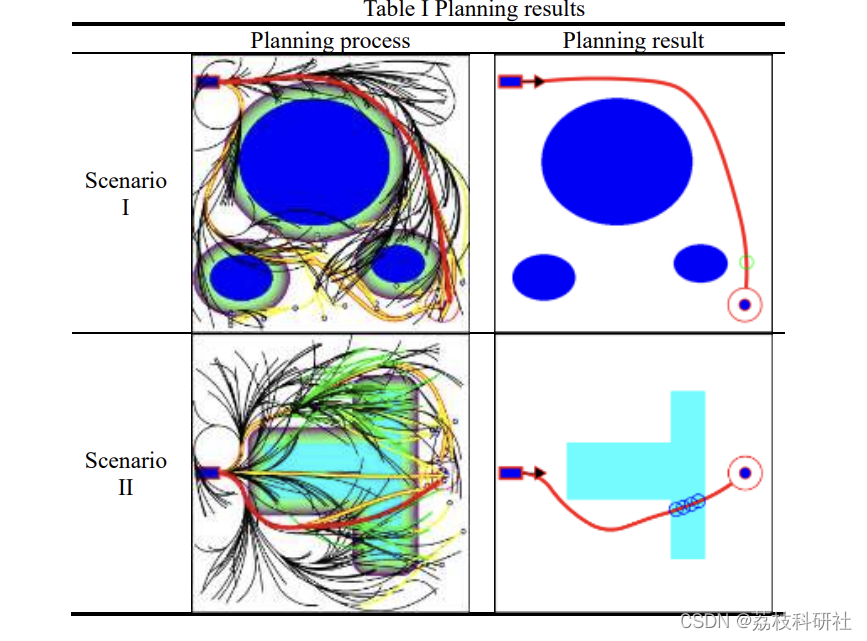
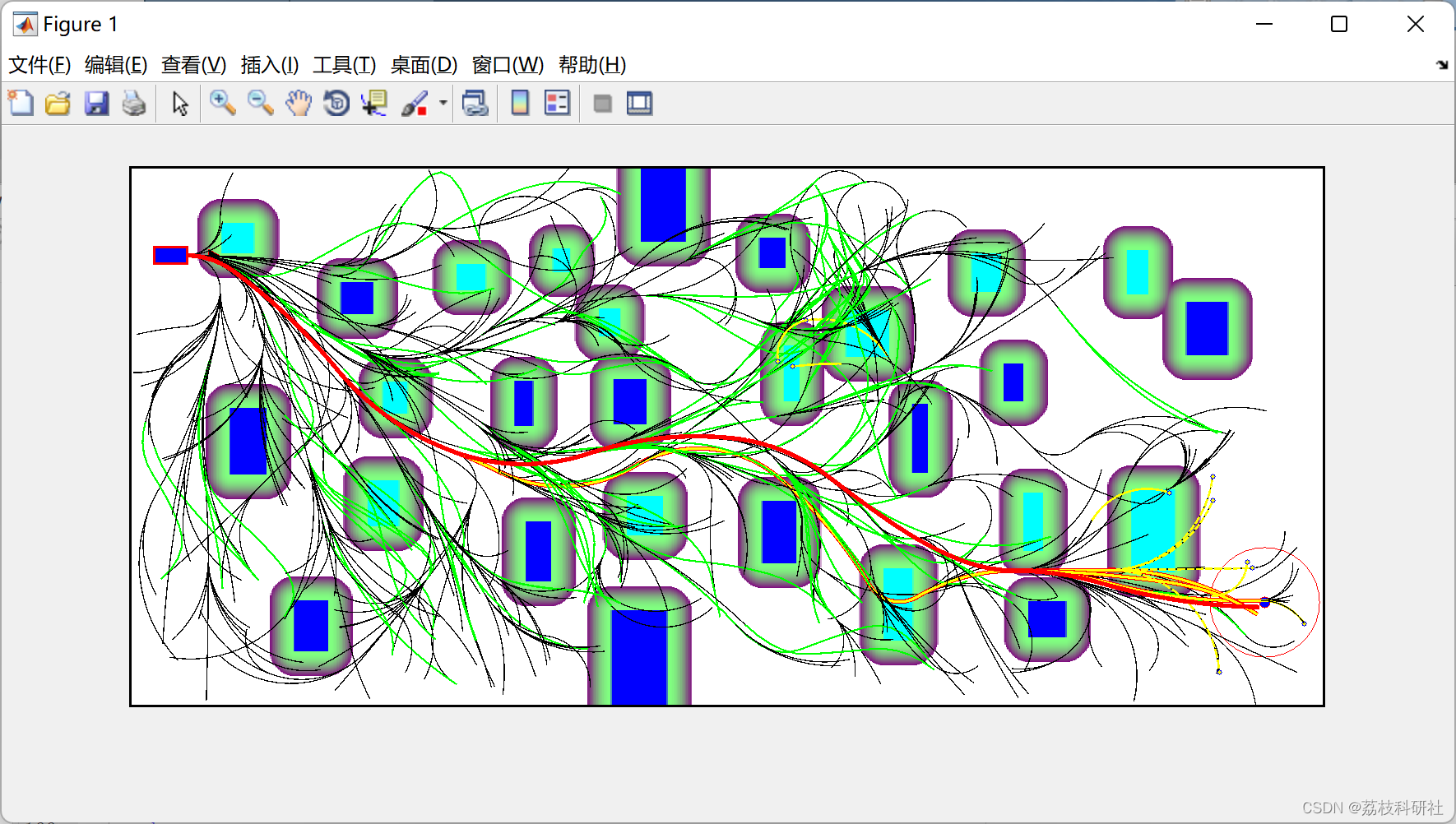
2.1 场景1
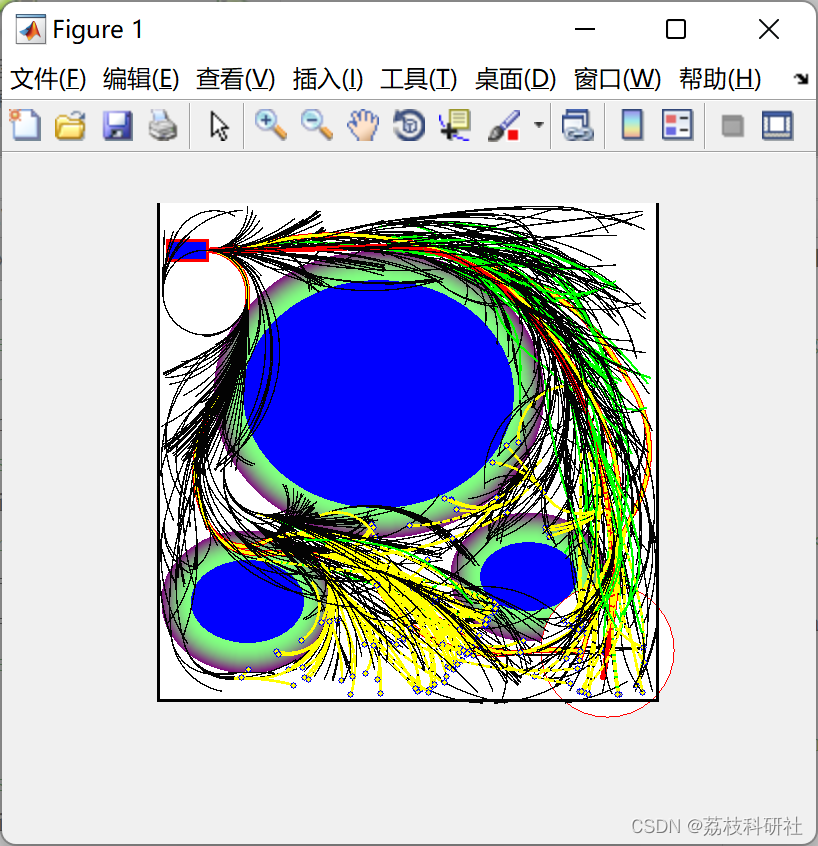
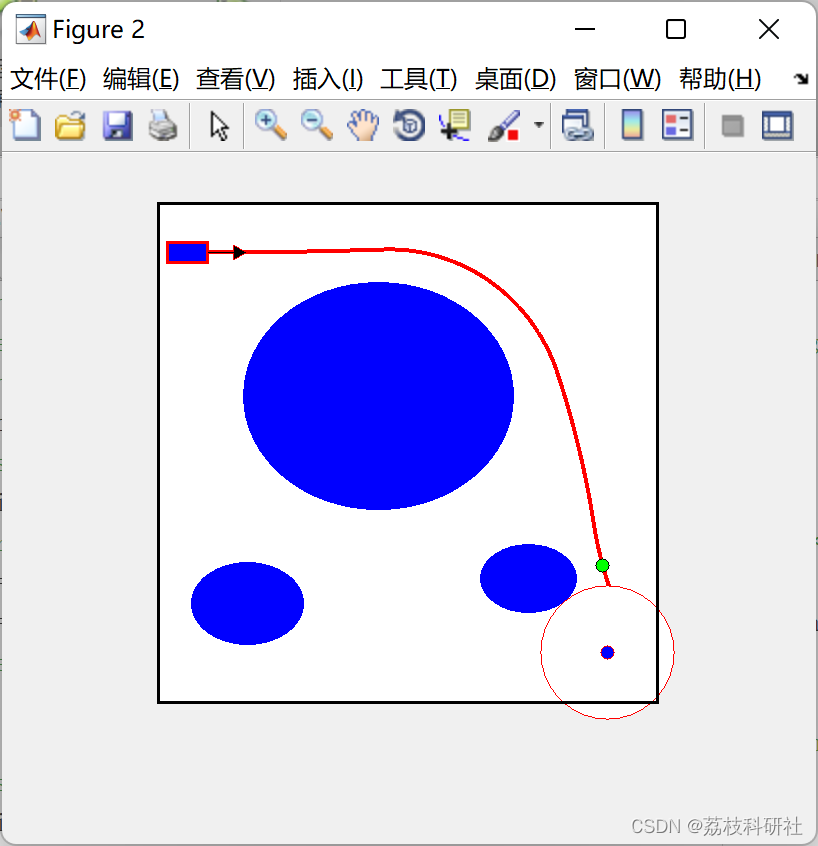
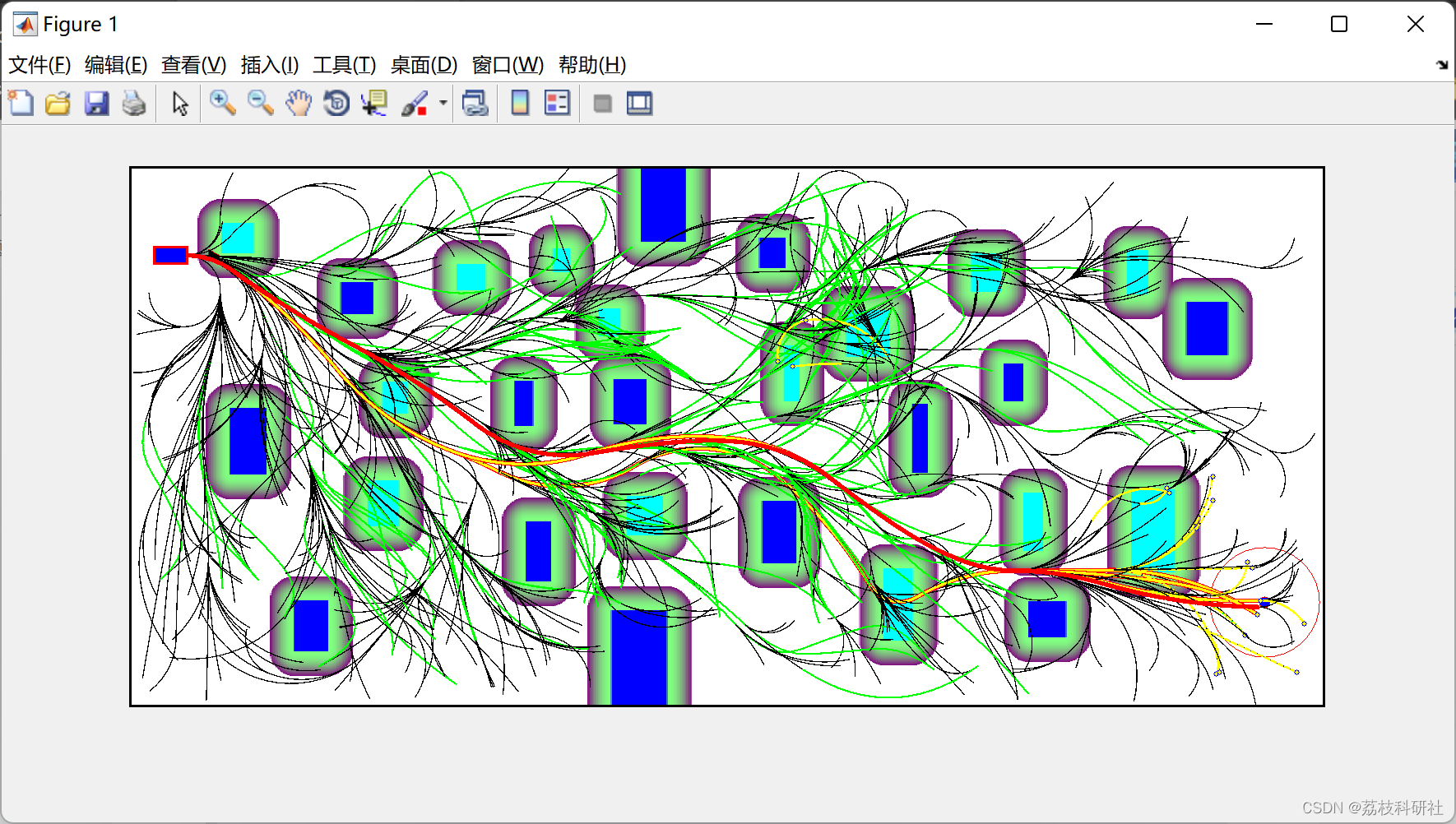
2.2 场景2
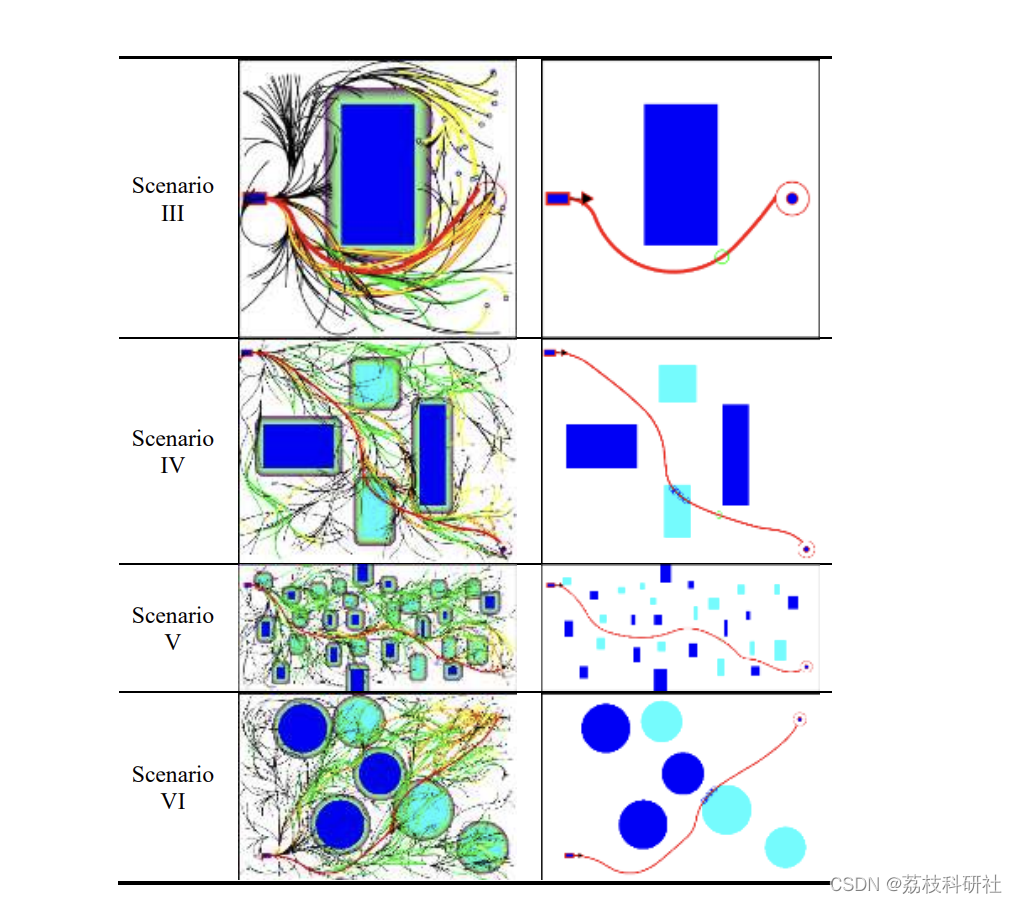
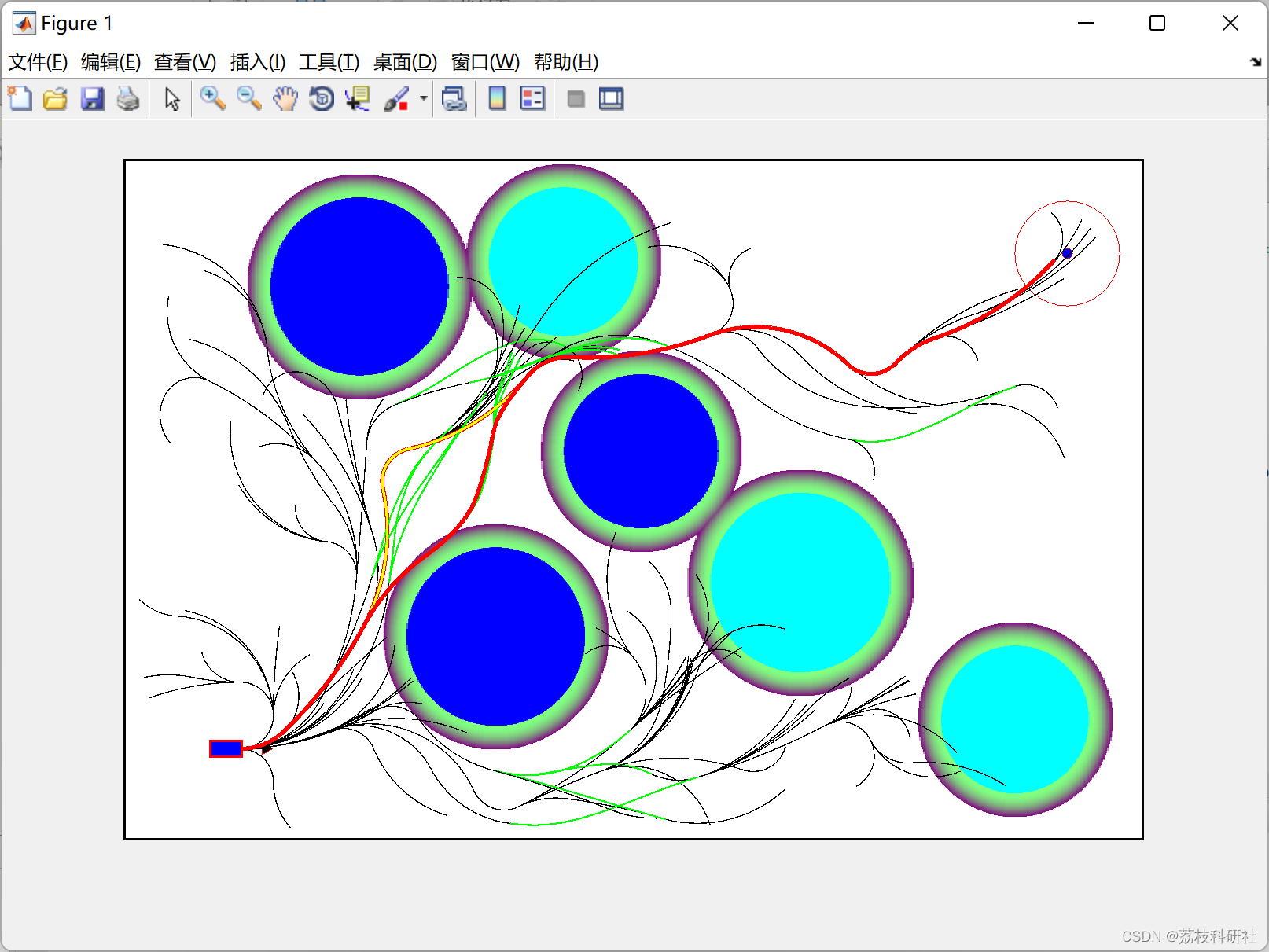
2.3 场景3
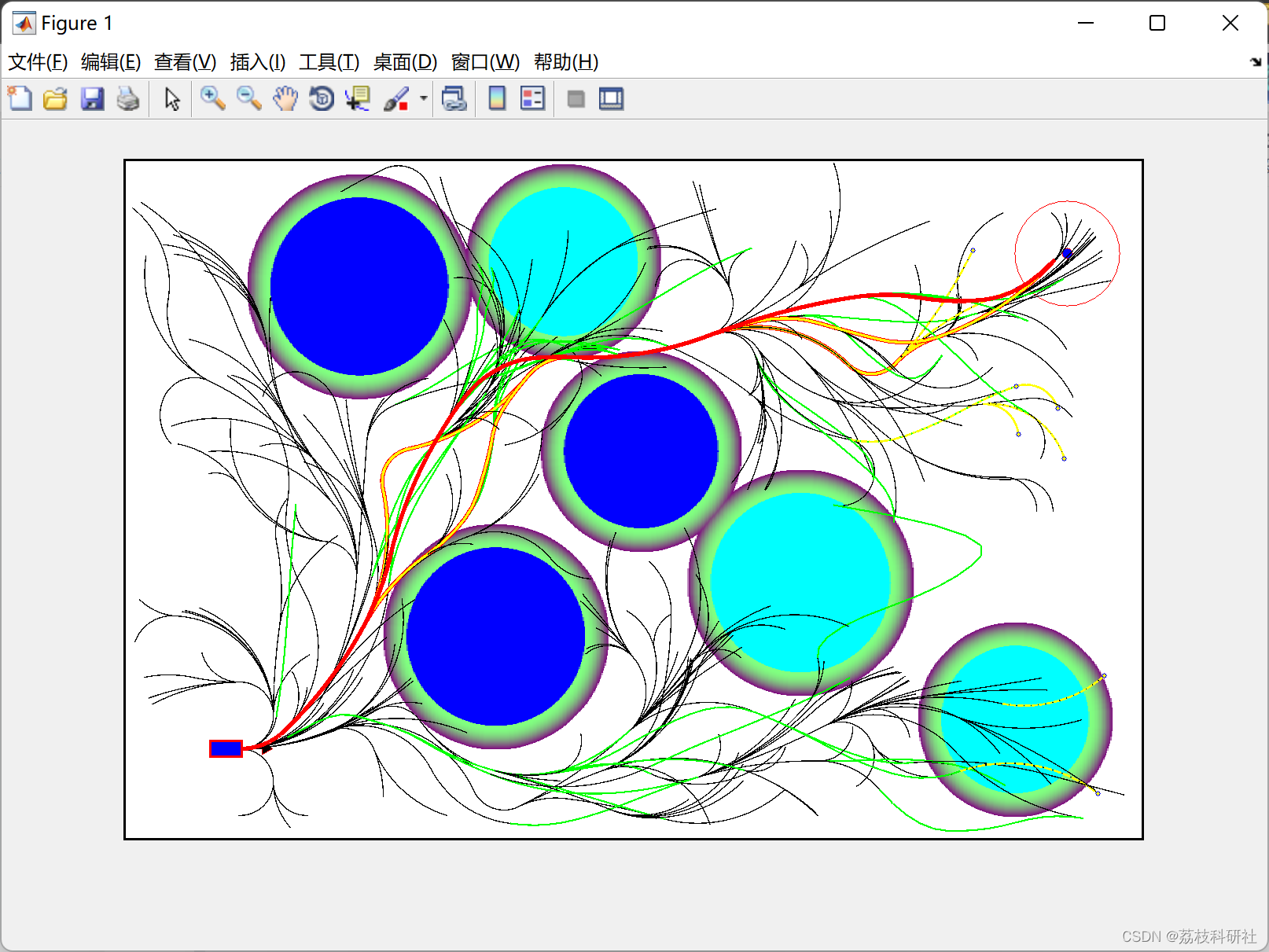
2.4 场景4

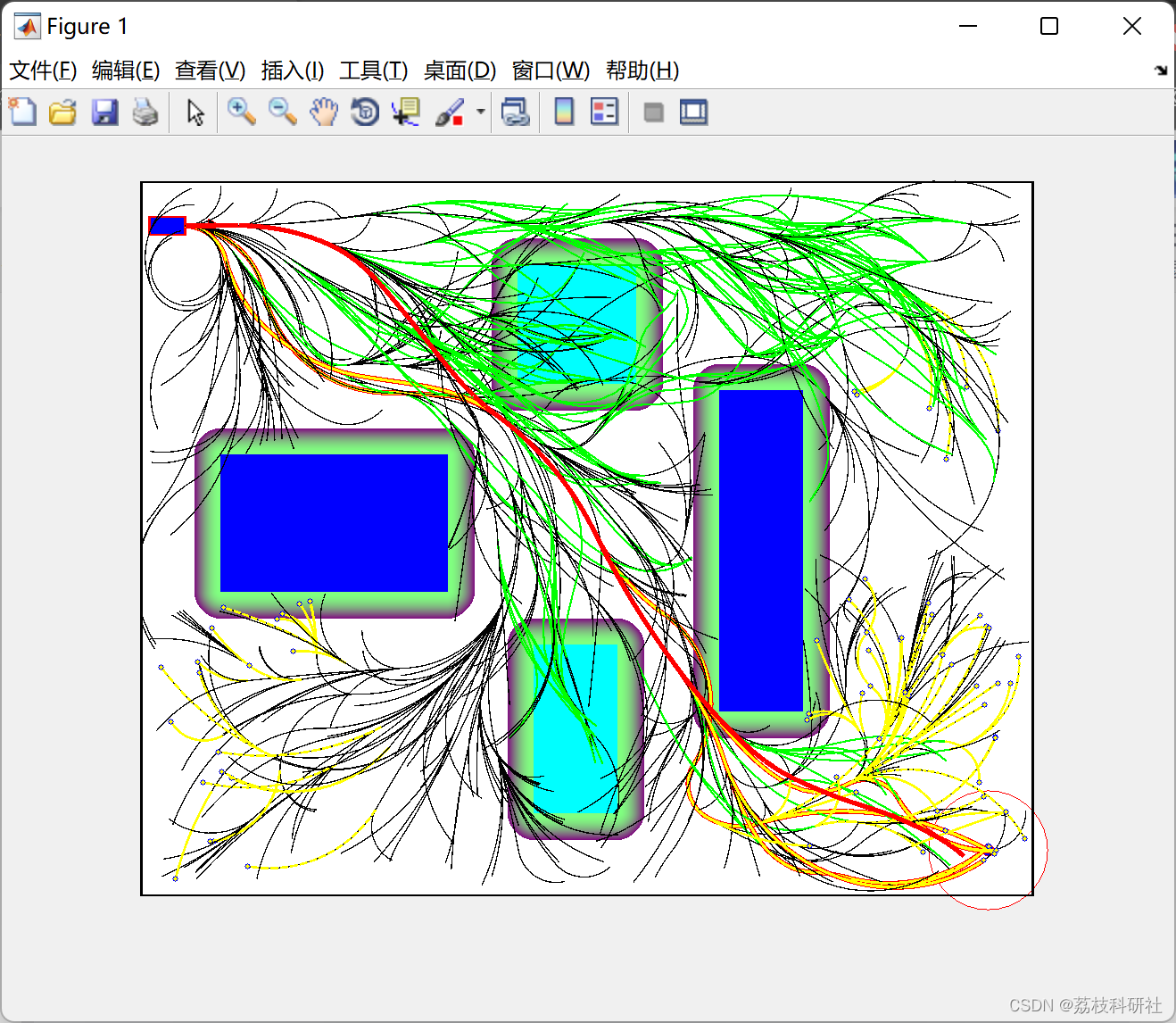
2.5 场景5
2.6 场景6

部分代码:
%**************************************
function T = init_Tree(start,goal)
T.v(1).x = start(1); % start point
T.v(1).y = start(2);
T.v(1).theta = start(3); % start orientation
T.v(1).xPrev = start(1); % parent node for start point
T.v(1).yPrev = start(2);
T.v(1).thetaPrev = start(3); % parent node orietation
T.v(1).dist=0; % RRT tree node 1 attribute of distance
T.v(1).angle=0;% RRT tree node 1 attribute of angle change
T.v(1).dist_angle=0; % distance + angle change
T.v(1).Potential_value=0; % RRT tree node 1 attribute of potential value
T.v(1).Dist_Angle_PFvalue=0;% distance + angle change + potential value
T.v(1).indPrev = 0; %% RRT tree node 1 attribute of previous node index
T.v(1).path_flag = true;% if the node is within the path
T.v(1).valid = true; % if the node is active
T.v(1).Heuristic = norm([goal(1)-start(1) ,goal(2)-start(2)]);% RRT tree node heuristic value, to goal Euclidean distance
T.v(1).toGoal = norm(start(1,1:2) - goal); % estimation distance to goal for start point = cost to come + cost to go
T.v(1).series = zeros(16,3); % trajectory points for node 1
end
function [ChooseNeighbor_Rang, rewiring_range, minimal_rewiring_range, plot_flag, flag_rand_goal, coef_angle, Circle_radius, div_n, diff_margin] = Init_Parameter(Goal)
ChooseNeighbor_Rang = 220; % Neighbor range
rewiring_range = 280; % Rewire range
minimal_rewiring_range = 180; % Minimal rewire range
plot_flag = false; % plot flag
flag_rand_goal = false; % random sample flag
coef_angle = 40; % coefficient of angle
Circle_radius =60; % vehicle turing circle
div_n = 15; % segment division
diff_margin = 20; % optimal trajectory cost update margin
end
🌈3 Matlab代码、数据、文章讲解
🎉4 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]Hongqing Tian, Boqi Li, Heye Huang, Ling Han (2022) A driving risk-aversive motion planning algorithm for vehicles in off-road environment.
相关文章
- 修改matlab编码集到utf-8
- matlab 折线图 配色
- matlab逆变器仿真程序,PWM逆变器Matlab仿真「建议收藏」
- matlab fir带通滤波,基于Matlab的FIR带通滤波器设计与实现
- MATLAB中imfill()函数[通俗易懂]
- MATLAB好玩的代码_Matlab代码
- 基于matlab的声源定位系统_matlab电流源在哪
- Linux安装Matlab Runtime运行环境
- matlab plot函数详解_MATLAB的plot
- 香农编码的 matlab 实现「建议收藏」
- matlab 加权回归估计_Matlab:地理加权回归基本操作「建议收藏」
- 基于matlab的图像处理案例教程_matlab gui图像处理
- MATLAB循环_matlab如何循环计算
- Matlab循环语句_matlab中if语句的用法
- Matlab函数定义_matlab子函数
- matlab 怎么使用function,Matlab中function函数使用操作方法
- Matlab实现图像分割
- 看看咱是如何用MATLAB白嫖遥遥领先于同行的神仙级翻译工具 — DeepL
- MATLAB软件商业数学应用2022 win/mac电脑版下载安装,MATLAB数学
- Linux下使用Matlab玩转编程世界。(linux下matlab)
- 快速安装Linux上的MATLAB(linux安装matlab)