
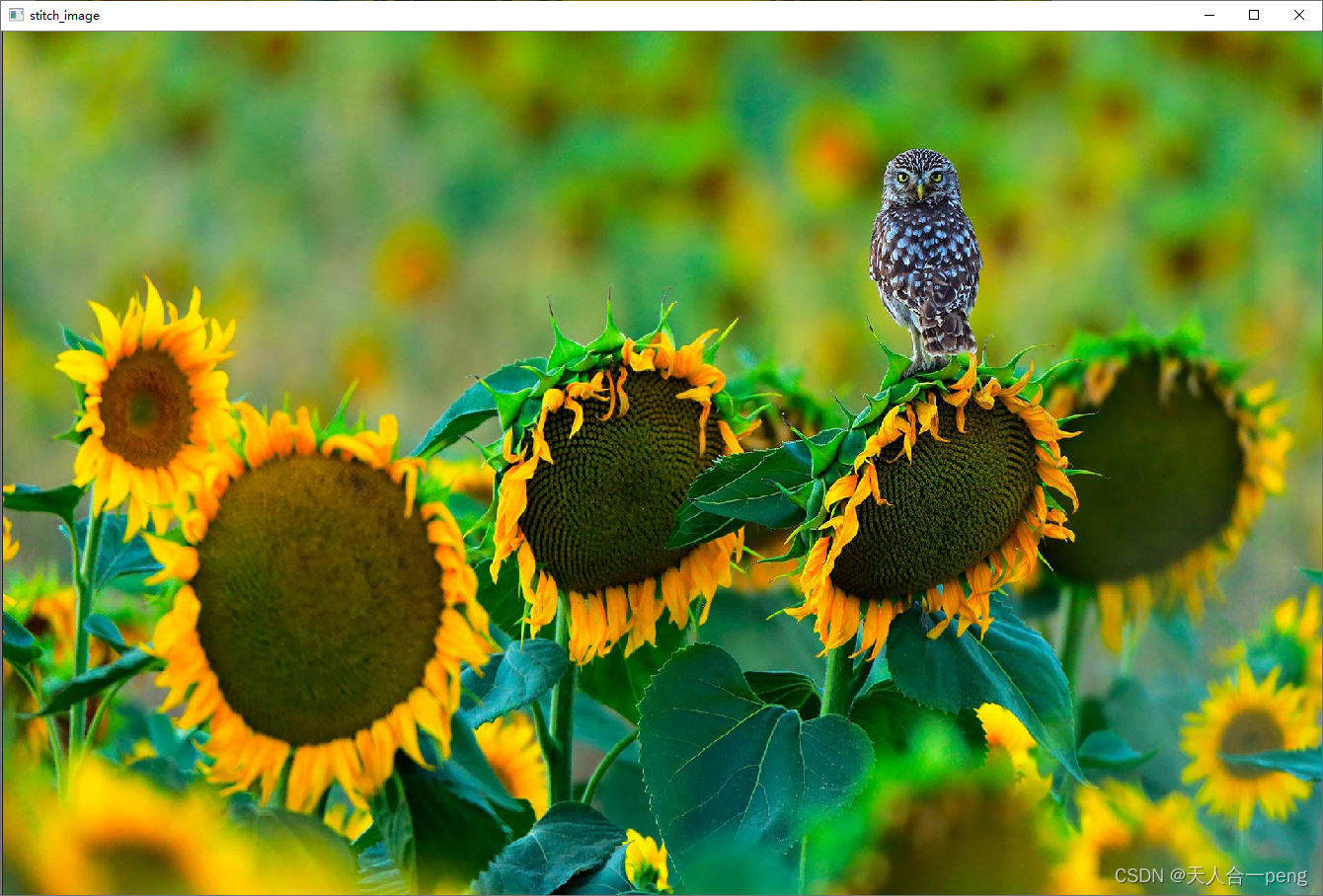
opencv 基于GMS的图像拼接
Opencv 基于 图像 拼接
2023-09-27 14:25:49 时间


gms_matcher.h
#pragma once
#pragma once
#include <opencv2/opencv.hpp>
#include <vector>
#include <iostream>
#include <ctime>
using namespace std;
using namespace cv;
#define THRESH_FACTOR 6
// 8 possible rotation and each one is 3 X 3
const int mRotationPatterns[8][9] = {
1,2,3,
4,5,6,
7,8,9,
4,1,2,
7,5,3,
8,9,6,
7,4,1,
8,5,2,
9,6,3,
8,7,4,
9,5,1,
6,3,2,
9,8,7,
6,5,4,
3,2,1,
6,9,8,
3,5,7,
2,1,4,
3,6,9,
2,5,8,
1,4,7,
2,3,6,
1,5,9,
4,7,8
};
// 5 level scales
const double mScaleRatios[5] = { 1.0, 1.0 / 2, 1.0 / sqrt(2.0), sqrt(2.0), 2.0 };
class gms_matcher
{
public:
// OpenCV Keypoints & Correspond Image Size & Nearest Neighbor Matches
gms_matcher(const vector<KeyPoint>& vkp1, const Size size1, const vector<KeyPoint>& vkp2, const Size size2, const vector<DMatch>& vDMatches)
{
// Input initialize
NormalizePoints(vkp1, size1, mvP1);
NormalizePoints(vkp2, size2, mvP2);
mNumberMatches = vDMatches.size();
ConvertMatches(vDMatches, mvMatches);
// Grid initialize
mGridSizeLeft = Size(20, 20);
mGridNumberLeft = mGridSizeLeft.width * mGridSizeLeft.height;
// Initialize the neihbor of left grid
mGridNeighborLeft = Mat::zeros(mGridNumberLeft, 9, CV_32SC1);
InitalizeNiehbors(mGridNeighborLeft, mGridSizeLeft);
};
~gms_matcher() {};
private:
// Normalized Points
vector<Point2f> mvP1, mvP2;
// Matches
vector<pair<int, int> > mvMatches;
// Number of Matches
size_t mNumberMatches;
// Grid Size
Size mGridSizeLeft, mGridSizeRight;
int mGridNumberLeft;
int mGridNumberRight;
// x : left grid idx
// y : right grid idx
// value : how many matches from idx_left to idx_right
Mat mMotionStatistics;
//
vector<int> mNumberPointsInPerCellLeft;
// Inldex : grid_idx_left
// Value : grid_idx_right
vector<int> mCellPairs;
// Every Matches has a cell-pair
// first : grid_idx_left
// second : grid_idx_right
vector<pair<int, int> > mvMatchPairs;
// Inlier Mask for output
vector<bool> mvbInlierMask;
//
Mat mGridNeighborLeft;
Mat mGridNeighborRight;
public:
// Get Inlier Mask
// Return number of inliers
int GetInlierMask(vector<bool>& vbInliers, bool WithScale = false, bool WithRotation = false);
private:
// Normalize Key Points to Range(0 - 1)
void NormalizePoints(const vector<KeyPoint>& kp, const Size& size, vector<Point2f>& npts) {
const size_t numP = kp.size();
const int width = size.width;
const int height = size.height;
npts.resize(numP);
for (size_t i = 0; i < numP; i++)
{
npts[i].x = kp[i].pt.x / width;
npts[i].y = kp[i].pt.y / height;
}
}
// Convert OpenCV DMatch to Match (pair<int, int>)
void ConvertMatches(const vector<DMatch>& vDMatches, vector<pair<int, int> >& vMatches) {
vMatches.resize(mNumberMatches);
for (size_t i = 0; i < mNumberMatches; i++)
{
vMatches[i] = pair<int, int>(vDMatches[i].queryIdx, vDMatches[i].trainIdx);
}
}
int GetGridIndexLeft(const Point2f& pt, int type) {
int x = 0, y = 0;
if (type == 1) {
x = floor(pt.x * mGridSizeLeft.width);
y = floor(pt.y * mGridSizeLeft.height);
if (y >= mGridSizeLeft.height || x >= mGridSizeLeft.width) {
return -1;
}
}
if (type == 2) {
x = floor(pt.x * mGridSizeLeft.width + 0.5);
y = floor(pt.y * mGridSizeLeft.height);
if (x >= mGridSizeLeft.width || x < 1) {
return -1;
}
}
if (type == 3) {
x = floor(pt.x * mGridSizeLeft.width);
y = floor(pt.y * mGridSizeLeft.height + 0.5);
if (y >= mGridSizeLeft.height || y < 1) {
return -1;
}
}
if (type == 4) {
x = floor(pt.x * mGridSizeLeft.width + 0.5);
y = floor(pt.y * mGridSizeLeft.height + 0.5);
if (y >= mGridSizeLeft.height || y < 1 || x >= mGridSizeLeft.width || x < 1) {
return -1;
}
}
return x + y * mGridSizeLeft.width;
}
int GetGridIndexRight(const Point2f& pt) {
int x = floor(pt.x * mGridSizeRight.width);
int y = floor(pt.y * mGridSizeRight.height);
return x + y * mGridSizeRight.width;
}
// Assign Matches to Cell Pairs
void AssignMatchPairs(int GridType);
// Verify Cell Pairs
void VerifyCellPairs(int RotationType);
// Get Neighbor 9
vector<int> GetNB9(const int idx, const Size& GridSize) {
vector<int> NB9(9, -1);
int idx_x = idx % GridSize.width;
int idx_y = idx / GridSize.width;
for (int yi = -1; yi <= 1; yi++)
{
for (int xi = -1; xi <= 1; xi++)
{
int idx_xx = idx_x + xi;
int idx_yy = idx_y + yi;
if (idx_xx < 0 || idx_xx >= GridSize.width || idx_yy < 0 || idx_yy >= GridSize.height)
continue;
NB9[xi + 4 + yi * 3] = idx_xx + idx_yy * GridSize.width;
}
}
return NB9;
}
void InitalizeNiehbors(Mat& neighbor, const Size& GridSize) {
for (int i = 0; i < neighbor.rows; i++)
{
vector<int> NB9 = GetNB9(i, GridSize);
int* data = neighbor.ptr<int>(i);
memcpy(data, &NB9[0], sizeof(int) * 9);
}
}
void SetScale(int Scale) {
// Set Scale
mGridSizeRight.width = mGridSizeLeft.width * mScaleRatios[Scale];
mGridSizeRight.height = mGridSizeLeft.height * mScaleRatios[Scale];
mGridNumberRight = mGridSizeRight.width * mGridSizeRight.height;
// Initialize the neihbor of right grid
mGridNeighborRight = Mat::zeros(mGridNumberRight, 9, CV_32SC1);
InitalizeNiehbors(mGridNeighborRight, mGridSizeRight);
}
// Run
int run(int RotationType);
};
int gms_matcher::GetInlierMask(vector<bool>& vbInliers, bool WithScale, bool WithRotation) {
int max_inlier = 0;
if (!WithScale && !WithRotation)
{
SetScale(0);
max_inlier = run(1);
vbInliers = mvbInlierMask;
return max_inlier;
}
if (WithRotation && WithScale)
{
for (int Scale = 0; Scale < 5; Scale++)
{
SetScale(Scale);
for (int RotationType = 1; RotationType <= 8; RotationType++)
{
int num_inlier = run(RotationType);
if (num_inlier > max_inlier)
{
vbInliers = mvbInlierMask;
max_inlier = num_inlier;
}
}
}
return max_inlier;
}
if (WithRotation && !WithScale)
{
SetScale(0);
for (int RotationType = 1; RotationType <= 8; RotationType++)
{
int num_inlier = run(RotationType);
if (num_inlier > max_inlier)
{
vbInliers = mvbInlierMask;
max_inlier = num_inlier;
}
}
return max_inlier;
}
if (!WithRotation && WithScale)
{
for (int Scale = 0; Scale < 5; Scale++)
{
SetScale(Scale);
int num_inlier = run(1);
if (num_inlier > max_inlier)
{
vbInliers = mvbInlierMask;
max_inlier = num_inlier;
}
}
return max_inlier;
}
return max_inlier;
}
void gms_matcher::AssignMatchPairs(int GridType) {
for (size_t i = 0; i < mNumberMatches; i++)
{
Point2f& lp = mvP1[mvMatches[i].first];
Point2f& rp = mvP2[mvMatches[i].second];
int lgidx = mvMatchPairs[i].first = GetGridIndexLeft(lp, GridType);
int rgidx = -1;
if (GridType == 1)
{
rgidx = mvMatchPairs[i].second = GetGridIndexRight(rp);
}
else
{
rgidx = mvMatchPairs[i].second;
}
if (lgidx < 0 || rgidx < 0) continue;
mMotionStatistics.at<int>(lgidx, rgidx)++;
mNumberPointsInPerCellLeft[lgidx]++;
}
}
void gms_matcher::VerifyCellPairs(int RotationType) {
const int* CurrentRP = mRotationPatterns[RotationType - 1];
for (int i = 0; i < mGridNumberLeft; i++)
{
if (sum(mMotionStatistics.row(i))[0] == 0)
{
mCellPairs[i] = -1;
continue;
}
int max_number = 0;
for (int j = 0; j < mGridNumberRight; j++)
{
int* value = mMotionStatistics.ptr<int>(i);
if (value[j] > max_number)
{
mCellPairs[i] = j;
max_number = value[j];
}
}
int idx_grid_rt = mCellPairs[i];
const int* NB9_lt = mGridNeighborLeft.ptr<int>(i);
const int* NB9_rt = mGridNeighborRight.ptr<int>(idx_grid_rt);
int score = 0;
double thresh = 0;
int numpair = 0;
for (size_t j = 0; j < 9; j++)
{
int ll = NB9_lt[j];
int rr = NB9_rt[CurrentRP[j] - 1];
if (ll == -1 || rr == -1) continue;
score += mMotionStatistics.at<int>(ll, rr);
thresh += mNumberPointsInPerCellLeft[ll];
numpair++;
}
thresh = THRESH_FACTOR * sqrt(thresh / numpair);
if (score < thresh)
mCellPairs[i] = -2;
}
}
int gms_matcher::run(int RotationType) {
mvbInlierMask.assign(mNumberMatches, false);
// Initialize Motion Statisctics
mMotionStatistics = Mat::zeros(mGridNumberLeft, mGridNumberRight, CV_32SC1);
mvMatchPairs.assign(mNumberMatches, pair<int, int>(0, 0));
for (int GridType = 1; GridType <= 4; GridType++)
{
// initialize
mMotionStatistics.setTo(0);
mCellPairs.assign(mGridNumberLeft, -1);
mNumberPointsInPerCellLeft.assign(mGridNumberLeft, 0);
AssignMatchPairs(GridType);
VerifyCellPairs(RotationType);
// Mark inliers
for (size_t i = 0; i < mNumberMatches; i++)
{
if (mvMatchPairs[i].first >= 0) {
if (mCellPairs[mvMatchPairs[i].first] == mvMatchPairs[i].second)
{
mvbInlierMask[i] = true;
}
}
}
}
int num_inlier = sum(mvbInlierMask)[0];
return num_inlier;
}
stitch.cpp
#include "gms_matcher.h"
//#define USE_GPU
#ifdef USE_GPU
#include <opencv2/cudafeatures2d.hpp>
using cuda::GpuMat;
#endif
void GmsMatch(Mat& img1, Mat& img2);
//Mat DrawInlier(Mat& src1, Mat& src2, vector<KeyPoint>& kpt1, vector<KeyPoint>& kpt2, vector<DMatch>& inlier, int type);
Mat DrawInlier(Mat& src1, Mat& src2, vector<KeyPoint>& kpt1, vector<KeyPoint>& kpt2, vector<DMatch>& inlier, int type, vector<Point2f>& kpLeft, vector<Point2f>& kpRight);
void CalcCorners(const Mat& H, const Mat& src);
Mat stitchImages(vector<Point2f>& kpLeft, vector<Point2f>& kpRight, Mat& img_left, Mat& img_right);
typedef struct
{
Point2f left_top;
Point2f left_bottom;
Point2f right_top;
Point2f right_bottom;
}four_corners_t;
four_corners_t corners;
void runImagePair() {
Mat img_left = imread("../data/flowerL.jpg");
Mat img_right = imread("../data/flowerR.jpg");
//Mat img_left = imread("../data/SL.jpg");
//Mat img_right = imread("../data/SR.jpg");
//Mat img_left = imread("../data/Image_02.jpg");
//Mat img_right = imread("../data/Image_01.jpg");
GmsMatch(img_left, img_right);
}
int main()
{
#ifdef USE_GPU
int flag = cuda::getCudaEnabledDeviceCount();
if (flag != 0) { cuda::setDevice(0); }
#endif // USE_GPU
runImagePair();
return 0;
}
void GmsMatch(Mat& img_left, Mat& img_right) {
vector<KeyPoint> kp1, kp2;
Mat d1, d2;
vector<DMatch> matches_all, matches_gms;
Ptr<ORB> orb = ORB::create(10000);
orb->setFastThreshold(0);
orb->detectAndCompute(img_left, Mat(), kp1, d1);
orb->detectAndCompute(img_right, Mat(), kp2, d2);
#ifdef USE_GPU
GpuMat gd1(d1), gd2(d2);
Ptr<cuda::DescriptorMatcher> matcher = cv::cuda::DescriptorMatcher::createBFMatcher(NORM_HAMMING);
matcher->match(gd1, gd2, matches_all);
#else
BFMatcher matcher(NORM_HAMMING);
matcher.match(d1, d2, matches_all);
#endif
// GMS filter
std::vector<bool> vbInliers;
gms_matcher gms(kp1, img_left.size(), kp2, img_right.size(), matches_all);
int num_inliers = gms.GetInlierMask(vbInliers, false, false);
cout << "Get total " << num_inliers << " matches." << endl;
// collect matches
for (size_t i = 0; i < vbInliers.size(); ++i)
{
if (vbInliers[i] == true)
{
matches_gms.push_back(matches_all[i]);
}
}
// draw matching
vector<Point2f> kpLeft, kpRight;
//Mat show = DrawInlier(img1, img2, kp1, kp2, matches_gms, 1);
Mat show = DrawInlier(img_left, img_right, kp1, kp2, matches_gms, 1, kpLeft, kpRight);
//namedWindow("show", 2);
imshow("matchingshow", show);
// stitch images
Mat stitch_image = stitchImages(kpLeft, kpRight, img_left, img_right);
namedWindow("stitch_image", 2);
imshow("stitch_image", stitch_image);
waitKey();
}
Mat stitchImages(vector<Point2f>& kpLeft, vector<Point2f>& kpRight, Mat& img_left, Mat& img_right)
{
//获取图像1到图像2的投影映射矩阵 尺寸为3*3
Mat homo = findHomography(kpRight, kpLeft, RANSAC);
cout << "变换矩阵为:\n" << homo << endl << endl; //输出映射矩阵
//计算配准图的四个顶点坐标
CalcCorners(homo, img_right);
//图像配准
Mat imageTransform1, imageTransform2;
warpPerspective(img_right, imageTransform1, homo, Size(MAX(corners.right_top.x, corners.right_bottom.x), img_left.rows));
//namedWindow("transformedImage", 2);
//imshow("transformedImage", imageTransform1); //直接经过透视矩阵变换
waitKey();
//创建拼接后的图,需提前计算图的大小
int dst_width = imageTransform1.cols; //取最右点的长度为拼接图的长度
//int dst_width = imageLeft.cols + imageRight.cols; //取最右点的长度为拼接图的长度
int dst_height = img_left.rows;
Mat dst_stitch(dst_height, dst_width, CV_8UC3);
dst_stitch.setTo(0);
imageTransform1.copyTo(dst_stitch(Rect(0, 0, imageTransform1.cols, imageTransform1.rows)));
//namedWindow("transform1", 2);
//imshow("transform1", dst_stitch);
//waitKey();
img_left.copyTo(dst_stitch(Rect(0, 0, img_left.cols, img_left.rows)));
return dst_stitch;
}
Mat DrawInlier(Mat& src1, Mat& src2, vector<KeyPoint>& kpt1, vector<KeyPoint>& kpt2, vector<DMatch>& inlier, int type, vector<Point2f>& kpLeft, vector<Point2f>& kpRight) {
const int height = max(src1.rows, src2.rows);
const int width = src1.cols + src2.cols;
Mat output(height, width, CV_8UC3, Scalar(0, 0, 0));
src1.copyTo(output(Rect(0, 0, src1.cols, src1.rows)));
src2.copyTo(output(Rect(src1.cols, 0, src2.cols, src2.rows)));
if (type == 1)
{
for (size_t i = 0; i < inlier.size(); i++)
{
Point2f left = kpt1[inlier[i].queryIdx].pt;
Point2f right = (kpt2[inlier[i].trainIdx].pt + Point2f((float)src1.cols, 0.f));
kpLeft.push_back(left);
kpRight.push_back(kpt2[inlier[i].trainIdx].pt);
line(output, left, right, Scalar(0, 255, 255));
}
}
else if (type == 2)
{
for (size_t i = 0; i < inlier.size(); i++)
{
Point2f left = kpt1[inlier[i].queryIdx].pt;
Point2f right = (kpt2[inlier[i].trainIdx].pt + Point2f((float)src1.cols, 0.f));
kpLeft.push_back(left);
kpRight.push_back(kpt2[inlier[i].trainIdx].pt);
line(output, left, right, Scalar(255, 0, 0));
}
for (size_t i = 0; i < inlier.size(); i++)
{
Point2f left = kpt1[inlier[i].queryIdx].pt;
Point2f right = (kpt2[inlier[i].trainIdx].pt + Point2f((float)src1.cols, 0.f));
kpLeft.push_back(left);
kpRight.push_back(kpt2[inlier[i].trainIdx].pt);
circle(output, left, 1, Scalar(0, 255, 255), 2);
circle(output, right, 1, Scalar(0, 255, 0), 2);
}
}
return output;
}
void CalcCorners(const Mat& H, const Mat& src)
{
double v2[] = { 0, 0, 1 };//左上角
double v1[3];//变换后的坐标值
Mat V2 = Mat(3, 1, CV_64FC1, v2); //列向量
Mat V1 = Mat(3, 1, CV_64FC1, v1); //列向量
V1 = H * V2;
//左上角(0,0,1)
cout << "V2: " << V2 << endl;
cout << "V1: " << V1 << endl;
corners.left_top.x = v1[0] / v1[2];
corners.left_top.y = v1[1] / v1[2];
//左下角(0,src.rows,1)
v2[0] = 0;
v2[1] = src.rows;
v2[2] = 1;
V2 = Mat(3, 1, CV_64FC1, v2); //列向量
V1 = Mat(3, 1, CV_64FC1, v1); //列向量
V1 = H * V2;
corners.left_bottom.x = v1[0] / v1[2];
corners.left_bottom.y = v1[1] / v1[2];
//右上角(src.cols,0,1)
v2[0] = src.cols;
v2[1] = 0;
v2[2] = 1;
V2 = Mat(3, 1, CV_64FC1, v2); //列向量
V1 = Mat(3, 1, CV_64FC1, v1); //列向量
V1 = H * V2;
corners.right_top.x = v1[0] / v1[2];
corners.right_top.y = v1[1] / v1[2];
//右下角(src.cols,src.rows,1)
v2[0] = src.cols;
v2[1] = src.rows;
v2[2] = 1;
V2 = Mat(3, 1, CV_64FC1, v2); //列向量
V1 = Mat(3, 1, CV_64FC1, v1); //列向量
V1 = H * V2;
corners.right_bottom.x = v1[0] / v1[2];
corners.right_bottom.y = v1[1] / v1[2];
}
GMS特征点匹配

匹配结果
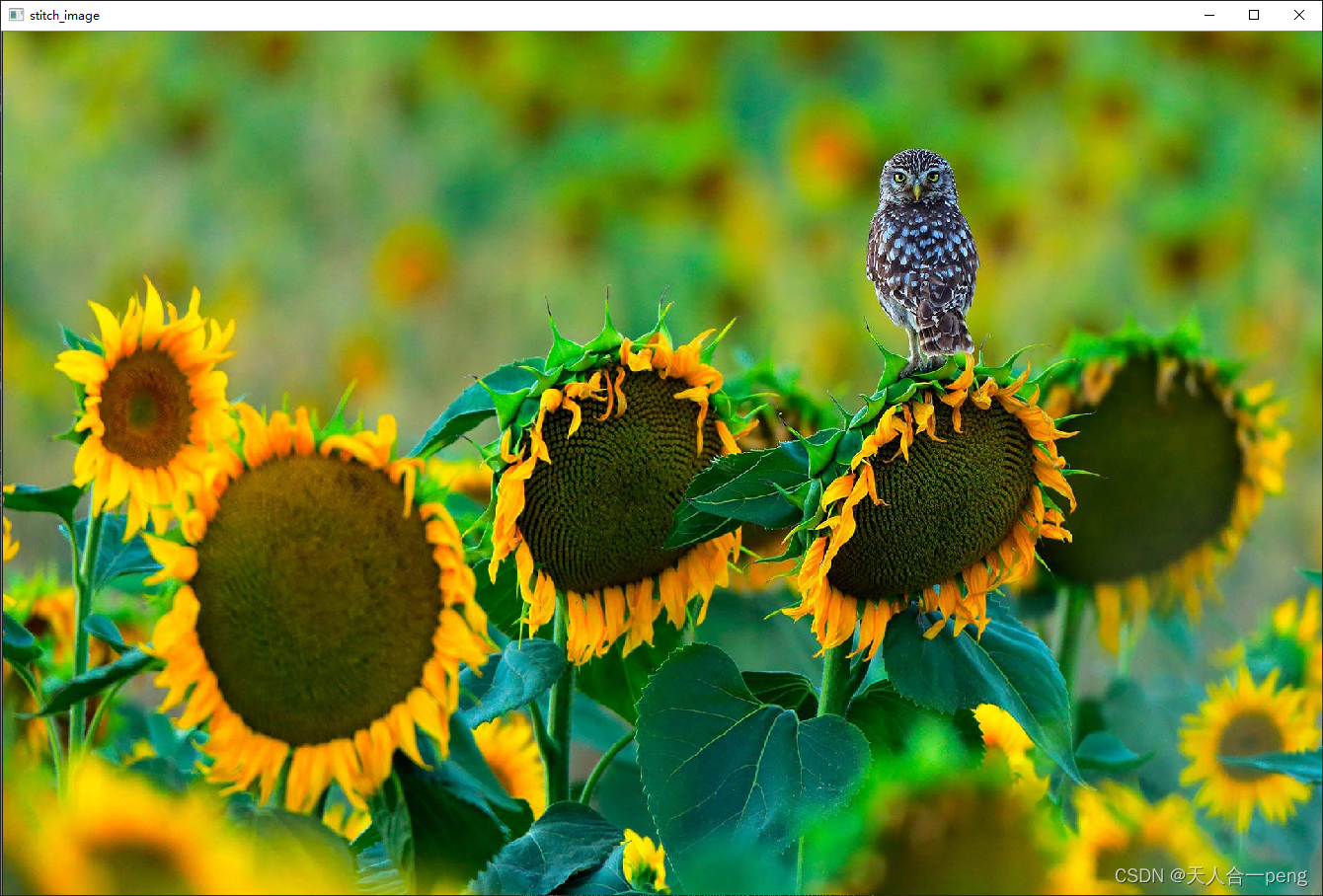
只处理可能重复的部分
stitch.cpp
#include "gms_matcher.h"
//#define USE_GPU
#ifdef USE_GPU
#include <opencv2/cudafeatures2d.hpp>
using cuda::GpuMat;
#endif
void GmsMatch(Mat& img1, Mat& img2, Mat& rect_l, Mat& rect_r);
void GmsMatch(Mat& img1, Mat& img2);
//Mat DrawInlier(Mat& src1, Mat& src2, vector<KeyPoint>& kpt1, vector<KeyPoint>& kpt2, vector<DMatch>& inlier, int type);
Mat DrawInlier(Mat& src1, Mat& src2, vector<KeyPoint>& kpt1, vector<KeyPoint>& kpt2, vector<DMatch>& inlier, int type, vector<Point2f>& kpLeft, vector<Point2f>& kpRight);
void CalcCorners(const Mat& H, const Mat& src);
Mat stitchImages(vector<Point2f>& kpLeft, vector<Point2f>& kpRight, Mat& img_left, Mat& img_right);
typedef struct
{
Point2f left_top;
Point2f left_bottom;
Point2f right_top;
Point2f right_bottom;
}four_corners_t;
four_corners_t corners;
void runImagePair() {
Mat img_left = imread("../data/flowerL.jpg");
Mat img_right = imread("../data/flowerR.jpg");
//Mat img_left = imread("../data/SL.jpg");
//Mat img_right = imread("../data/SR.jpg");
//Mat img_left = imread("../data/Image_02.jpg");
//Mat img_right = imread("../data/Image_01.jpg");
//--------------------------
//直接从可能重复的区域提取特征点匹配 当前是左右图在拼接处大概有1/3是重复的
Rect rect_right = Rect(0, 0, img_right.cols / 3, img_right.rows);
Rect rect_left = Rect(2 * img_left.cols / 3, 0, (img_left.cols / 3) - 1, img_left.rows);
Mat image_r_rect = img_right(Rect(rect_right));
Mat image_l_rect = img_left(Rect(rect_left));
GmsMatch(img_left, img_right, image_l_rect, image_r_rect);
}
int main()
{
#ifdef USE_GPU
int flag = cuda::getCudaEnabledDeviceCount();
if (flag != 0) { cuda::setDevice(0); }
#endif // USE_GPU
runImagePair();
return 0;
}
void GmsMatch(Mat& img_left, Mat& img_right, Mat& rect_l, Mat& rect_r) {
vector<KeyPoint> kp1, kp2;
Mat d1, d2;
vector<DMatch> matches_all, matches_gms;
Ptr<ORB> orb = ORB::create(10000);
orb->setFastThreshold(0);
orb->detectAndCompute(rect_l, Mat(), kp1, d1);
orb->detectAndCompute(rect_r, Mat(), kp2, d2);
#ifdef USE_GPU
GpuMat gd1(d1), gd2(d2);
Ptr<cuda::DescriptorMatcher> matcher = cv::cuda::DescriptorMatcher::createBFMatcher(NORM_HAMMING);
matcher->match(gd1, gd2, matches_all);
#else
BFMatcher matcher(NORM_HAMMING);
matcher.match(d1, d2, matches_all);
#endif
// GMS filter
std::vector<bool> vbInliers;
gms_matcher gms(kp1, rect_l.size(), kp2, rect_r.size(), matches_all);
int num_inliers = gms.GetInlierMask(vbInliers, false, false);
cout << "Get total " << num_inliers << " matches." << endl;
// collect matches
for (size_t i = 0; i < vbInliers.size(); ++i)
{
if (vbInliers[i] == true)
{
matches_gms.push_back(matches_all[i]);
}
}
// draw matching
vector<Point2f> kpLeft, kpRight;
//Mat show = DrawInlier(img1, img2, kp1, kp2, matches_gms, 1);
Mat show = DrawInlier(rect_l, rect_r, kp1, kp2, matches_gms, 1, kpLeft, kpRight);
//namedWindow("show", 2);
imshow("matchingshow", show);
waitKey();
// stitch images
Mat stitch_image = stitchImages(kpLeft, kpRight, img_left, img_right);
namedWindow("stitch_image", 2);
imshow("stitch_image", stitch_image);
waitKey();
}
void GmsMatch(Mat& img_left, Mat& img_right) {
vector<KeyPoint> kp1, kp2;
Mat d1, d2;
vector<DMatch> matches_all, matches_gms;
Ptr<ORB> orb = ORB::create(10000);
orb->setFastThreshold(0);
orb->detectAndCompute(img_left, Mat(), kp1, d1);
orb->detectAndCompute(img_right, Mat(), kp2, d2);
#ifdef USE_GPU
GpuMat gd1(d1), gd2(d2);
Ptr<cuda::DescriptorMatcher> matcher = cv::cuda::DescriptorMatcher::createBFMatcher(NORM_HAMMING);
matcher->match(gd1, gd2, matches_all);
#else
BFMatcher matcher(NORM_HAMMING);
matcher.match(d1, d2, matches_all);
#endif
// GMS filter
std::vector<bool> vbInliers;
gms_matcher gms(kp1, img_left.size(), kp2, img_right.size(), matches_all);
int num_inliers = gms.GetInlierMask(vbInliers, false, false);
cout << "Get total " << num_inliers << " matches." << endl;
// collect matches
for (size_t i = 0; i < vbInliers.size(); ++i)
{
if (vbInliers[i] == true)
{
matches_gms.push_back(matches_all[i]);
}
}
// draw matching
vector<Point2f> kpLeft, kpRight;
//Mat show = DrawInlier(img1, img2, kp1, kp2, matches_gms, 1);
Mat show = DrawInlier(img_left, img_right, kp1, kp2, matches_gms, 1, kpLeft, kpRight);
//namedWindow("show", 2);
imshow("matchingshow", show);
// stitch images
Mat stitch_image = stitchImages(kpLeft, kpRight, img_left, img_right);
namedWindow("stitch_image", 2);
imshow("stitch_image", stitch_image);
waitKey();
}
Mat stitchImages(vector<Point2f>& kpLeft, vector<Point2f>& kpRight, Mat& img_left, Mat& img_right)
{
//坐标原还至原图
for (int i = 0; i < kpLeft.size(); ++i)
{
kpLeft[i].x += 2*img_left.cols/3;
}
//获取图像1到图像2的投影映射矩阵 尺寸为3*3
Mat homo = findHomography(kpRight, kpLeft, RANSAC);
cout << "变换矩阵为:\n" << homo << endl << endl; //输出映射矩阵
//计算配准图的四个顶点坐标
CalcCorners(homo, img_right);
//图像配准
Mat imageTransform1, imageTransform2;
warpPerspective(img_right, imageTransform1, homo, Size(MAX(corners.right_top.x, corners.right_bottom.x), img_left.rows));
//namedWindow("transformedImage", 2);
//imshow("transformedImage", imageTransform1); //直接经过透视矩阵变换
waitKey();
//创建拼接后的图,需提前计算图的大小
int dst_width = imageTransform1.cols; //取最右点的长度为拼接图的长度
//int dst_width = imageLeft.cols + imageRight.cols; //取最右点的长度为拼接图的长度
int dst_height = img_left.rows;
Mat dst_stitch(dst_height, dst_width, CV_8UC3);
dst_stitch.setTo(0);
imageTransform1.copyTo(dst_stitch(Rect(0, 0, imageTransform1.cols, imageTransform1.rows)));
//namedWindow("transform1", 2);
//imshow("transform1", dst_stitch);
//waitKey();
img_left.copyTo(dst_stitch(Rect(0, 0, img_left.cols, img_left.rows)));
return dst_stitch;
}
Mat DrawInlier(Mat& src1, Mat& src2, vector<KeyPoint>& kpt1, vector<KeyPoint>& kpt2, vector<DMatch>& inlier, int type, vector<Point2f>& kpLeft, vector<Point2f>& kpRight) {
const int height = max(src1.rows, src2.rows);
const int width = src1.cols + src2.cols;
Mat output(height, width, CV_8UC3, Scalar(0, 0, 0));
src1.copyTo(output(Rect(0, 0, src1.cols, src1.rows)));
src2.copyTo(output(Rect(src1.cols, 0, src2.cols, src2.rows)));
if (type == 1)
{
for (size_t i = 0; i < inlier.size(); i++)
{
Point2f left = kpt1[inlier[i].queryIdx].pt;
Point2f right = (kpt2[inlier[i].trainIdx].pt + Point2f((float)src1.cols, 0.f));
kpLeft.push_back(left);
kpRight.push_back(kpt2[inlier[i].trainIdx].pt);
line(output, left, right, Scalar(0, 255, 255));
}
}
else if (type == 2)
{
for (size_t i = 0; i < inlier.size(); i++)
{
Point2f left = kpt1[inlier[i].queryIdx].pt;
Point2f right = (kpt2[inlier[i].trainIdx].pt + Point2f((float)src1.cols, 0.f));
kpLeft.push_back(left);
kpRight.push_back(kpt2[inlier[i].trainIdx].pt);
line(output, left, right, Scalar(255, 0, 0));
}
for (size_t i = 0; i < inlier.size(); i++)
{
Point2f left = kpt1[inlier[i].queryIdx].pt;
Point2f right = (kpt2[inlier[i].trainIdx].pt + Point2f((float)src1.cols, 0.f));
kpLeft.push_back(left);
kpRight.push_back(kpt2[inlier[i].trainIdx].pt);
circle(output, left, 1, Scalar(0, 255, 255), 2);
circle(output, right, 1, Scalar(0, 255, 0), 2);
}
}
return output;
}
void CalcCorners(const Mat& H, const Mat& src)
{
double v2[] = { 0, 0, 1 };//左上角
double v1[3];//变换后的坐标值
Mat V2 = Mat(3, 1, CV_64FC1, v2); //列向量
Mat V1 = Mat(3, 1, CV_64FC1, v1); //列向量
V1 = H * V2;
//左上角(0,0,1)
cout << "V2: " << V2 << endl;
cout << "V1: " << V1 << endl;
corners.left_top.x = v1[0] / v1[2];
corners.left_top.y = v1[1] / v1[2];
//左下角(0,src.rows,1)
v2[0] = 0;
v2[1] = src.rows;
v2[2] = 1;
V2 = Mat(3, 1, CV_64FC1, v2); //列向量
V1 = Mat(3, 1, CV_64FC1, v1); //列向量
V1 = H * V2;
corners.left_bottom.x = v1[0] / v1[2];
corners.left_bottom.y = v1[1] / v1[2];
//右上角(src.cols,0,1)
v2[0] = src.cols;
v2[1] = 0;
v2[2] = 1;
V2 = Mat(3, 1, CV_64FC1, v2); //列向量
V1 = Mat(3, 1, CV_64FC1, v1); //列向量
V1 = H * V2;
corners.right_top.x = v1[0] / v1[2];
corners.right_top.y = v1[1] / v1[2];
//右下角(src.cols,src.rows,1)
v2[0] = src.cols;
v2[1] = src.rows;
v2[2] = 1;
V2 = Mat(3, 1, CV_64FC1, v2); //列向量
V1 = Mat(3, 1, CV_64FC1, v1); //列向量
V1 = H * V2;
corners.right_bottom.x = v1[0] / v1[2];
corners.right_bottom.y = v1[1] / v1[2];
}

相关文章
- 基于OpenCV的算式识别与批改系统 设想
- 基于opencv批量读取文件夹中的图像裁剪兴趣区域并保存
- 基于 OpenCV 和 GStreamer 显示 RTSP 视频流
- 【计算机视觉】基于OpenCV的人脸识别
- 【OpenCV】 像素加减乘除 & 逻辑运算
- 基于opencv+python实现数独
- 基于opencv的模板匹配【C++/Qt】【附源码】
- 基于c++/opencv实现的机器视觉标准函数,可以快速应用到qt/MFC等框架
- 【工程应用五】 opencv中linemod模板匹配算法诸多疑惑和自我解读。
- 实战 | 计算器/数码管数字识别 基于OpenCV和EasyOCR/PaddleOCR(附源码)
- C# OpenCV-EmguCV找圆应用实例(二) 基于霍夫圆变换
- C# OpenCV-EmguCV找圆应用实例(一) 基于轮廓拟合
- OpenCV DNN人脸检测模块使用步骤演示(基于OpenCV4.5.4)
- Python,OpenCV基于支持向量机SVM的手写数字OCR
- OpenCV中的Shi-Tomasi角点检测器
- Python,OpenCV直方图均衡化以提高图像对比度
- 【OpenCV】- 多边形将轮廓包围
- extract digits subordinary image from original image with OpenCV
- opencv-absdiff两个数组差的绝对值