
倍福PLC通过CANOpen通信控制伺服
2023-09-27 14:22:13 时间
对于Motec伺服控制器,可以通过CANopen的方式和倍福的TwinCAT3系统通讯,配置方便,修改灵活
- 软硬件版本
1.1. 倍福Beckhoff
1.1.1. 控制器硬件
TwinCAT3笔记本
Win10 64bit
CX2020 win7
1.1.2. 控制软件
TwinCAT 3.1 Build 4024.0
EL6751主站模块
1.2. Motec伺服
1.2.1. CANopen接口
与Motec伺服通过EL6751主站模块通讯
1.2.2. Beckhoff通讯方式
CANopen主站通讯 - 准备工作
2.1. 网络接线
使用RJ45连接CX2020与笔记本,使用CANopen连线EL6751与Motec伺服接线如下:

需要配置120Ω的终端电阻
2.2. 设置笔记本与CX控制器IP地址
设置为自动获取即可
3. 操作步骤
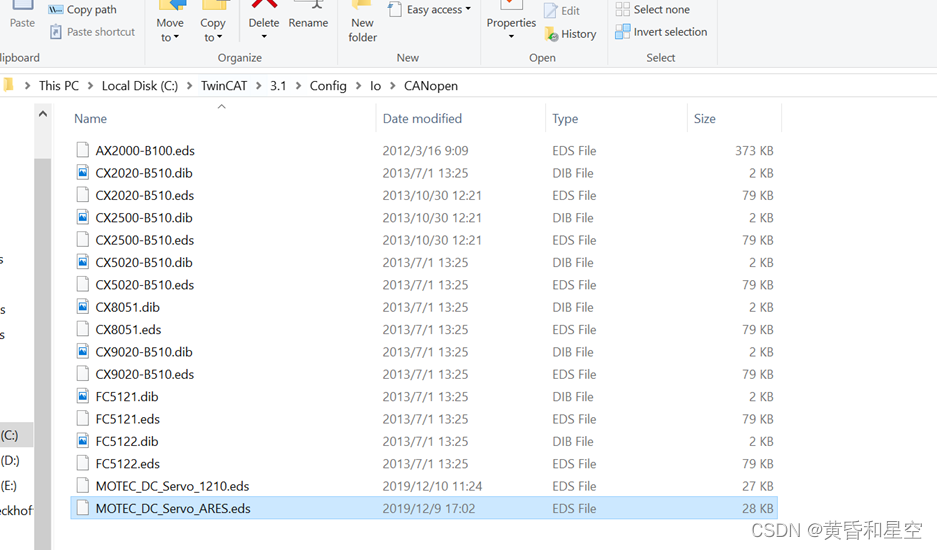
3.1. 添加Motec伺服EDS文件
3.2. 扫描硬件
扫描硬件,选择通信波特率,默认为500k

相关文章
- TCP流量控制和拥塞控制
- 【控制】PID和LQR
- 小Demo大知识-通过控制Button移动来学习Android坐标
- 智能家庭本周锋闻:Mac零成本秒变手势控制
- 控制spring容器自动加载顺序
- Spring Security(16)——基于表达式的权限控制
- excel的宏与VBA入门(三)——流程控制
- HoeflerText字体未找到 你看到这个就已经中招了 攻击者咋不勒索改远程控制了
- Wannacry ExternalBlue漏洞又被利用 Backdoor.Nitol和Gh0st远程控制恶意软件正在传播
- 云杉网络:开放可编程+细粒度控制 将释放SDN真实价值
- PHP+redis+SIGALRM信号实现队列可靠消费和消费超时控制
- 【DevOps】jenkins集成openldap,控制各个项目权限
- Ansible Playbook的任务控制 day5
- 【每日随笔】注意力陷阱 ( 技术无关、不要点进来看 | 注意力控制 | 注意力收割 )
- 证券业数据大集中及其风险控制分析
- IOS 日志输出控制
- 大数据必学Java基础(二十):流程控制的引入和if语句介绍
- 运输层:TCP 流量控制