
华为HI第二款车,阿维塔11的智能化有什么特点?
作者 | 德新
编辑 | 于婷

阿维塔11,这款车不用过多介绍,长安 x 宁德 x 华为 3家联合打造。
外观独特,在宝马17年的顶尖设计师Nader Faghihzadeh主导的设计;
用料也很足,90度 - 116度的电池,34.99万的起售价;
最亮的是,华为全栈的智能化技术。
9月份我们已经拍过实车,基础素质过硬。
智能化表现,差不多是这个车在12月新车交付前最后的待确定环节。
阿维塔11在交付后,首批就会开放:高速/快速路/城市环路的领航辅助驾驶,以及自动泊车功能。
华为提供的技术,阿维塔主导的产品定义,这款车辅助驾驶有什么特别?
1. 方案特点:上限高,极度平顺
讲智驾之前,我们先来看看阿维塔本身的产品设定:
阿维塔11这款产品,本身是运动兼顾舒适,但是更偏舒适的定位。这个车,有运动的底子,让驾驶者感受到有很好的操控,同时又兼顾了后排的舒适;
它的辅助驾驶系统也是一样,有非常强大的硬件,这堆硬件支撑了一个很高的上限,其实是可以有很激进的通过能力,但阿维塔又把它调得非常温和。
阿维塔内部打了一个比方,希望这个系统是一个有经验的礼宾司机,全程不踩一脚刹车,很有预见性地让这个车很安全、舒服、又高效。
阿维塔11的辅助驾驶系统有什么特色呢?
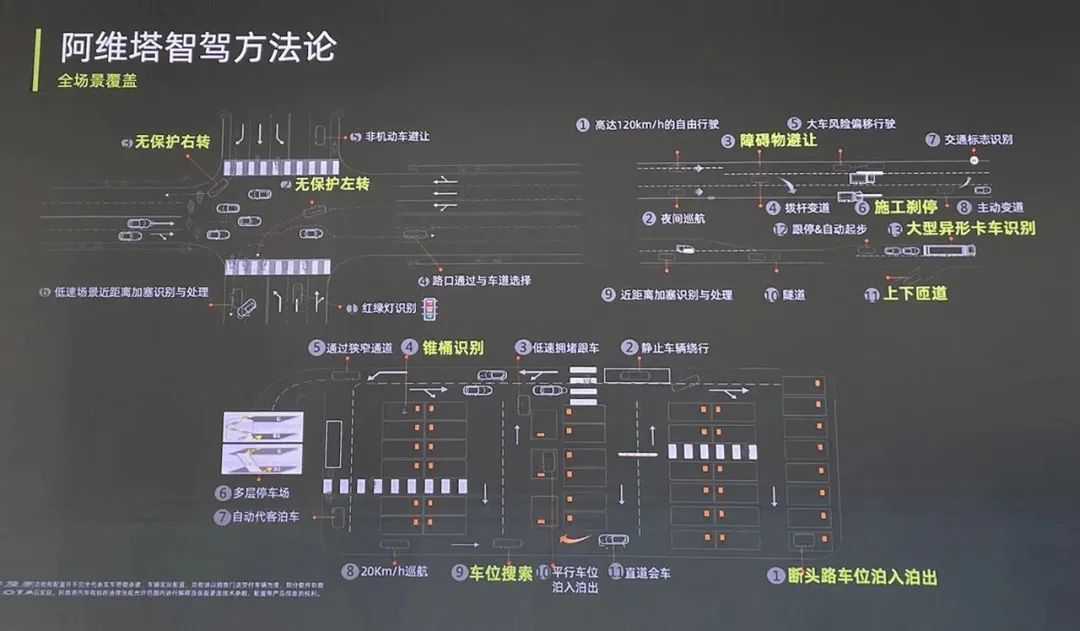
这张图,就是阿维塔11智驾产品定义的精髓。
绿字部分,是内部认为比较有特色的功能点。比如:
城区的无保护右转、无保护左转;
高速/封闭环路场景:障碍物避让,施工刹停,大型异形卡车识别,上下匝道;
低速泊车场景:车位搜索、锥筒识别、断头路泊入泊出。
2. 极限车位挑战:这也能停?
极限车位泊车,考验精准的感知能力,以及路径规划能力。
这是接近道路尽头的一个斜列车位。前进的方向已经被一排锥筒挡住了。
可用车位是左侧的第二车位,左侧第三车位也被一个锥筒占了。
所以锥筒和周边车辆就围成了一个有限空间。
阿维塔这个时候可以车头泊入或者车尾泊入,我们选择了难度更高的车尾泊入,这样还会增加一个调头的操作。
泊车过程中,阿维塔其实少量借用了后方已经被锥筒占用的车位空间,以及利用前面被锥筒围起来的一圈空间来实现调头。

这个调头泊入其实做得非常精细:
用激光雷达来精确地扫描周边的可用区域,既充分利用空间来调头,又不能碰到一些障碍物;
用摄像头来识别地面的停车位标识线;
用毫米波、超声波雷达,来检测车周边的行人,这样做到泊车的过程里,有行人通过随时刹停。
这种疑难杂症车位,有几重挑战:
第一,能不能识别到空车位;
第二,识别到空车位之后,敢不敢停。
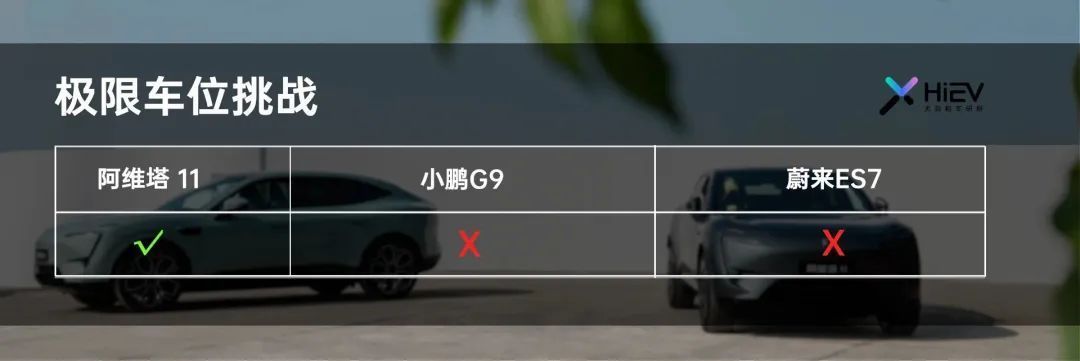
我们在现场也试了蔚来的ES7和小鹏的G9。
ES7和G9都没有成功识别到这个车位。
3. 魔鬼路段挑战:这也能过?
魔鬼路段挑战,主要考验感知能力,在强感知基础上,阿维塔11的规控是做得比较连续、舒缓的。
这是在专业测试场地,华为苏州的测试场,模拟的一个魔鬼路段,有大弯道、隧道、侧翻车、锥桶、水马、连续弯等等。
重点看两个场景:
侧翻车和锥筒。
这一类的异形静止物体、以及锥筒这样的小目标,加上施工场景,是我们之前开各种辅助驾驶车,在高速路段上非常常见的。
可以说极少成功识别,大部分情况会直接撞上去。
第一个场景隧道口的侧翻车。
我们来看一下阿维塔11的表现,过弯道之后,以时速接近60的速度,进隧道口,刹住了。
其他车辆的表现:
特斯拉Model Y识别到了,刹车不足,人为接管;
蔚来ES7 成功识别,成功刹住;
小鹏G9没有识别。

第二个场景是隧道内有一排连续的锥筒,相当于模拟一个施工场景,看车辆能否识别并自动变道;
·阿维塔11,顺利识别到了,并且汇入了左道;
· 特斯拉Model Y,识别到了,但是打的方向不够,差点擦边过去;
· 蔚来ES7,未识别到;
· 小鹏G9,远远识别到了,它停下等司机接管。


好的,上面两个场景挑战完毕,我们并不能直接得出,阿维塔11辅助驾驶能力最强的结果。
不过确实,值得一吹(讲)。
第一个场景下,有几重因素的挑战:时间短,光线变化,静止异形物体。
1. 车速大概在60左右,相当于每秒16.67米,撞上100米外的障碍物,大概只需要6秒,车速越高,难度越大;
2. 进入隧道,光线的明暗快速变化。这种情况下,驾驶员的人眼瞳孔放大,一般人眼的瞳孔反射时间大概是1 - 2秒。当光线明暗变化一大,摄像头就瞎了。
阿维塔11采用了高动态HDR算法。这个词在相机、影像领域听的很多。大概什么意思呢。就是当环境的光线发生快速变化时,相机会拍摄多帧,一些帧更亮、一些帧更暗,然后将这些帧的信息拼到一起,得到细节更丰富的画面。

3. 静止异形物体。回到这个时候,眼前突然出现了一个侧翻车辆。正常行驶的车辆,机器已经学习了千千万万遍,但侧翻了以后,它就变成了一个异形的物体。
这个时候,视觉图像算法不一定能识别出来异形的目标并且做出判断,所以这个场景也靠激光雷达、4D毫米波雷达来融合补充补充。激光雷达的特点就是测距准,4D毫米波的特点是增强了对静止物体的识别能力。
这段展示了于高性能传感器的融合感知能力。
再仔细看下第二个场景。
第二个场景主要是针对远距离锥筒的识别,难主要是考验对弱光环境下远距离小目标的精确感知能力。
隧道环境整体比较暗;
连续锥筒,是一堆比较远的小目标;
测距也是难点,只有精准感知到小目标的位置,才好做后面换道的决策规划;
阿维塔跟华为联合定义的这套智驾方案,摄像头也是一大特色:F/1.6的大光圈,3.0微米的像素尺寸。
大光圈大像素的好处就是,弱光下的画面细节会更丰富,也更加有利于识别算法对小物体的检测。
除此之外,融合的激光雷达也带来了帮助,不仅知道前面有锥筒,而且精确知道多个锥筒描绘的物理边界。
这些都是强感知带来的好处。
最后,做一点补充说明:
蔚来ES7和小鹏G9都加了激光雷达。我们了解到,ES7的激光雷达已经在投入使用,G9还没有,可能要到明年初XNGP开放时才会启用。
然后ES7的激光雷达在车顶,这个位置主要守护的是相对远距离一些的目标。
所以这里会呈现,大家都有激光雷达,但在能力上仍有差距的情况。
4. 公开道路挑战:这么丝滑?
公开道路体验,更多是让我们感受到阿维塔11的调校风格。
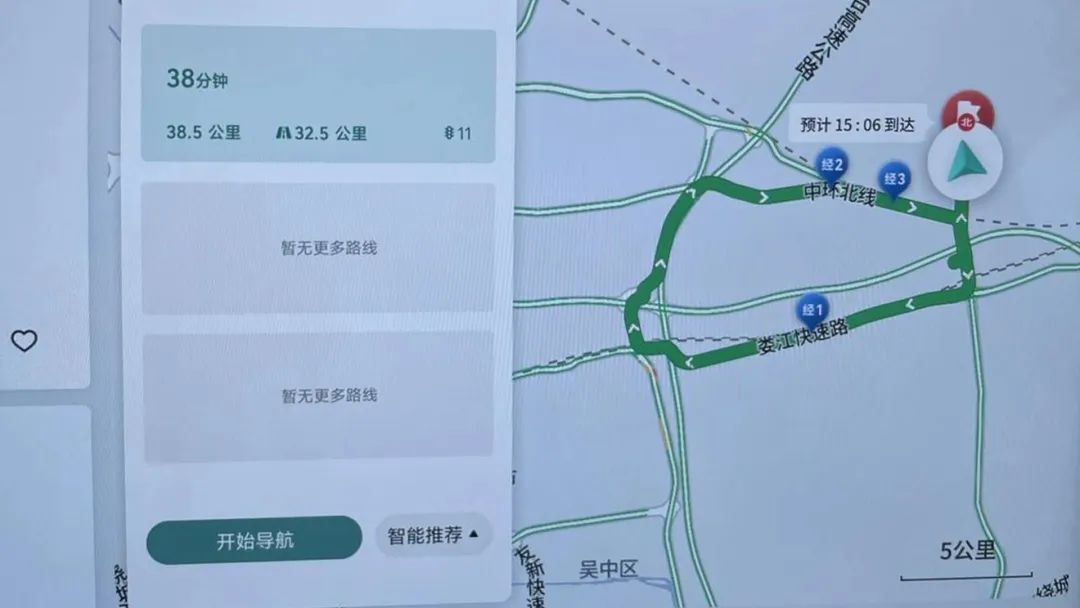
这是在苏州的一段快速路/城市环路场景,全长38公里多,快速路/封闭道路的路程大概在32公里左右,全程的平均时速大概在60+ km/h。
我们主要讲几点:
加塞的处理很平顺,减速比较轻柔;
入弯、入匝道,平滑过渡,不会有车速骤降的情况,比较符合人的驾驶习惯,舒适兼顾效率;
上下匝道,成功率高。
这些特性呢,还是回过来,跟车辆的感知能力有很大关系;其次,就是产品定义和调校风格。
整体上,阿维塔11的辅助驾驶调校风格,跟整车很像,也是运动性很强/能力很强的基础上,有一个非常舒适的交互界面,包括加减速的处理、自动打方向的力度/横向速度、方向盘的力矩反馈等等。

总的来说,阿维塔11的智驾能力绝对是第一梯队的。
比较有意思的是,关于阿维塔11的外观和内饰设计,在市场上评价是非常两极的,喜欢的用户非常喜欢,另一些人觉得难以接受。
大家比较有共识的是:
基础素质过硬;
加上华为的智能化技术;
加上明年进入华为的门店渠道加持。
看看TA会不会在明年迎来销量爆发。
相关文章
- 动手实践丨使用华为云IoT边缘体验“边云协同”
- 华为超大云数据中心落地贵州,这些硬核技术有利支撑“东数西算”
- 直击Huawei Mate 40产线背后的华为云IoT智能制造
- 华为云PB级数据库GaussDB(for Redis)揭秘第七期:高斯Redis与强一致
- 厚积薄发!华为云7篇论文被AAAI收录,2021年AI行业技术风向标看这里!
- 一文快速掌握华为云IPv6基础知识及使用指南
- 华为CVPR2021 | 加法网络应用于图像超分辨率(附github源码及论文下载)
- 华为诺亚实验室提出的TNT优于谷歌的 ViT 和 Facebook 的 DeiT
- 华为轮值董事长胡厚崑:没有自建芯片厂计划;苹果赔偿1亿美元给App开发者;Git.io停用|极客头条
- 传华为轮值董事长徐直军跳槽到上海微电子,其本人回应:“无稽之谈”
- 极客日报:阿里云公布IP地理位置库抄袭调查结果;华为云电脑8月16日将停止服务和运营;Chrome 92发布|
- 华为OJ培训主题 比赛统计
- 【华为OD机试真题 Java】多个数组合并
- 【华为OD机试真题 Java】小华打印数字
- 【华为OD机试真题 Java】第k长字符串(100%通过+全网最详细注释)
- 【华为OD机试真题 Java】统计射击比赛成绩
- 华为题库 HJ16 购物单