
基于RBF神经网络的机械臂运动控制算法(Matlab代码实现)
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
👨💻4 Matlab代码
💥1 概述
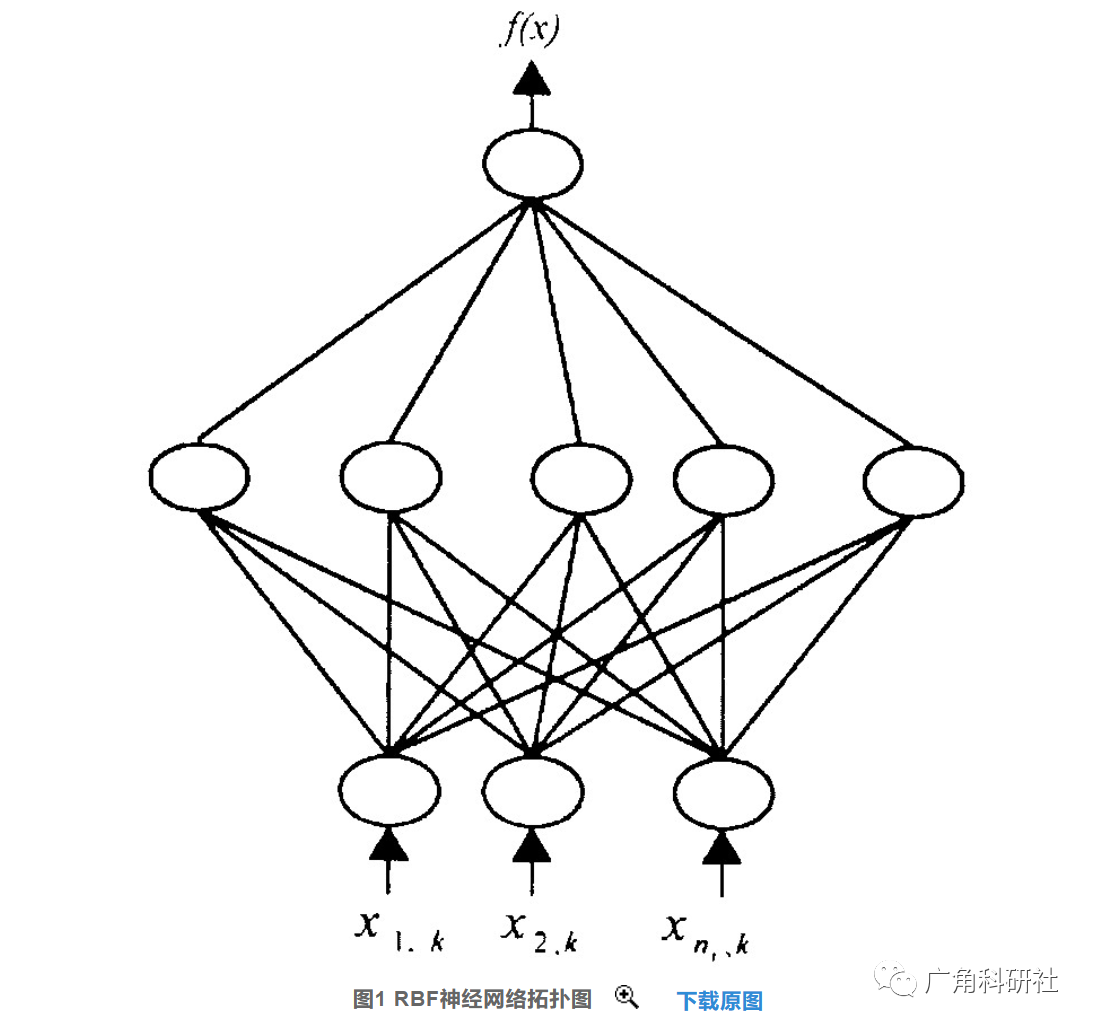
在信号处理、模式识别等系统中,多层前馈网络是应用较为广泛的模型。但是大部分基于反向传播的多层前馈网络的学习算法必须基于某种非线性优化技术的缺点,计算量大、学习速度慢。径向基函数神经网络(Radial Basis Function Neural Network)理论为多层前馈网络的学习提供了一种新颖而有效的手段。RBF网络不仅具有良好的推广能力,而且计算量少,学习速度一般也比其它算法快得多。
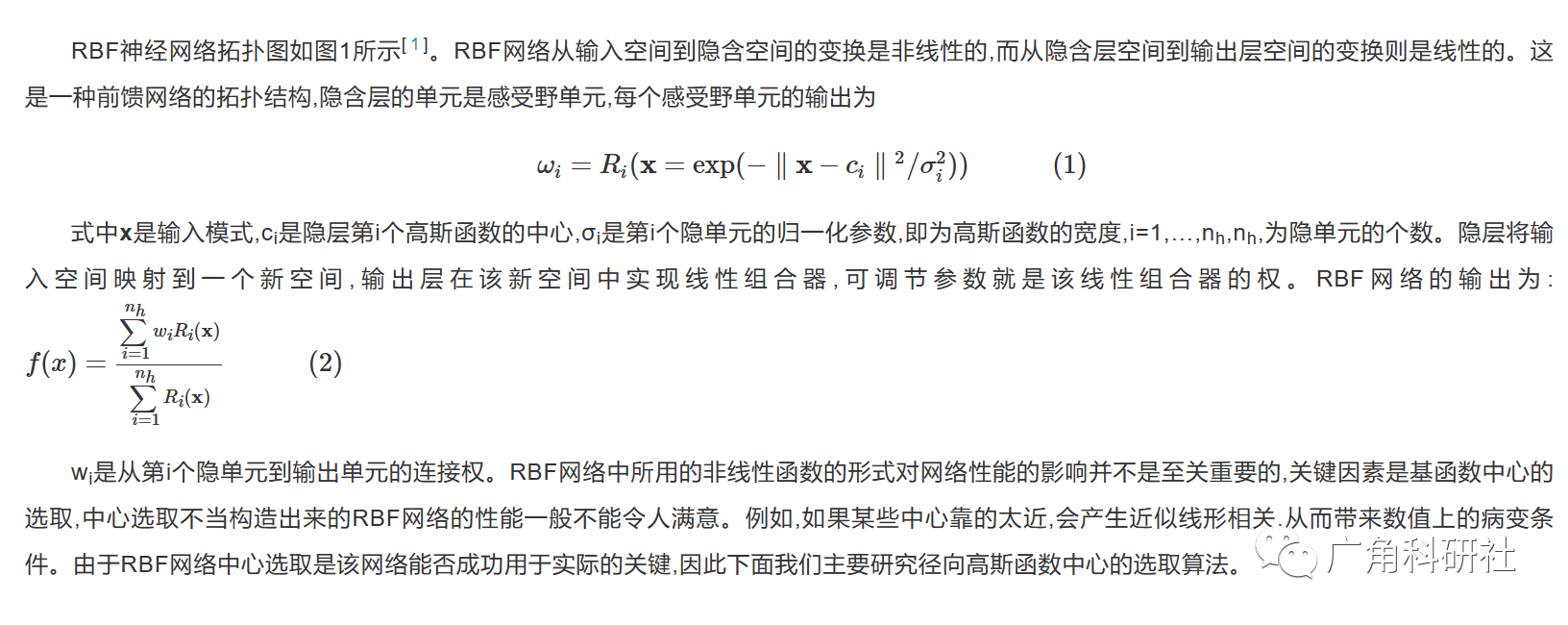
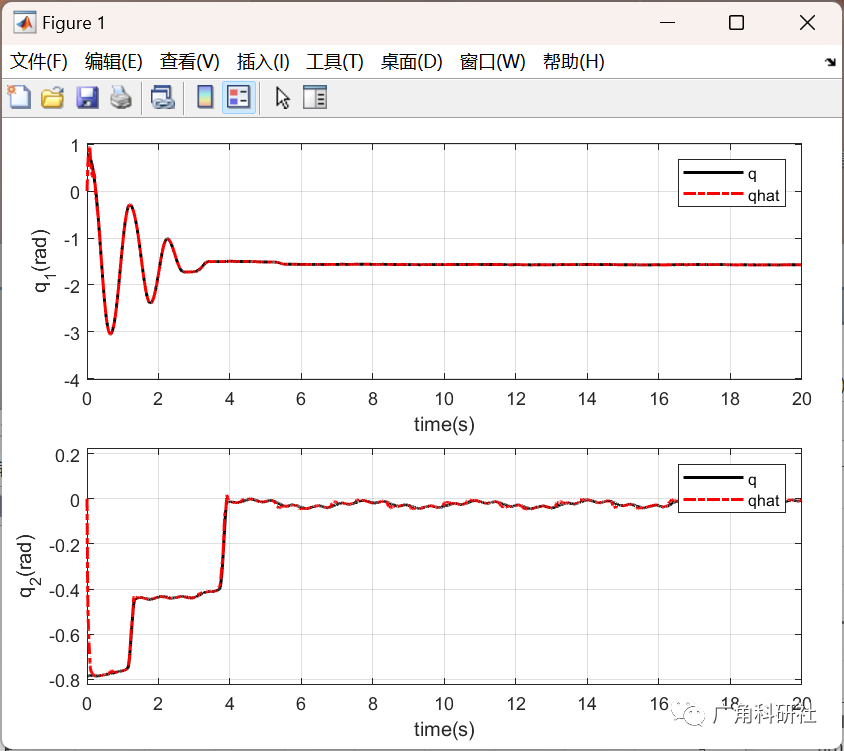
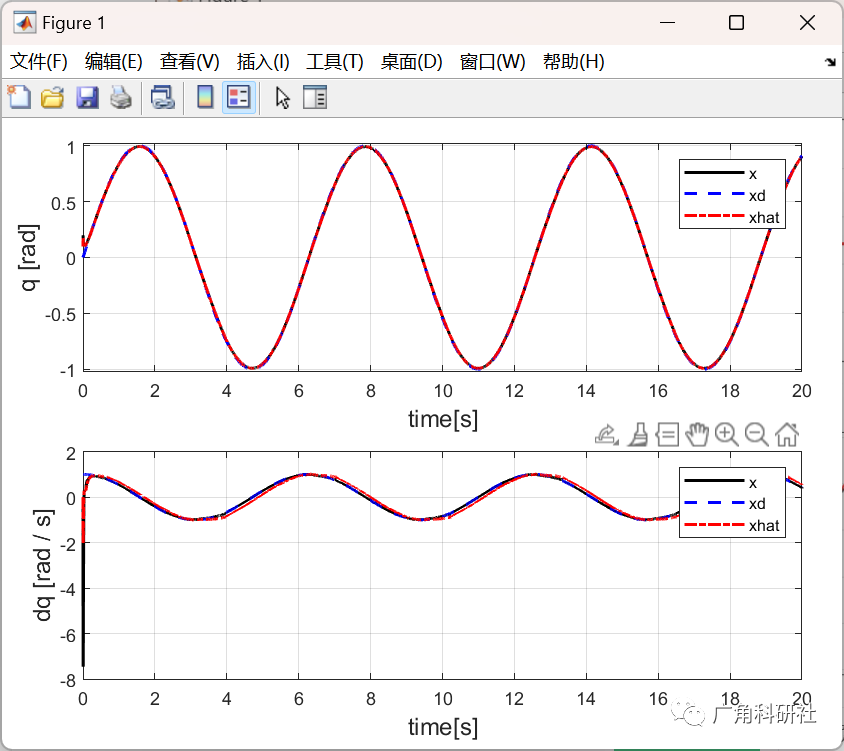
📚2 运行结果
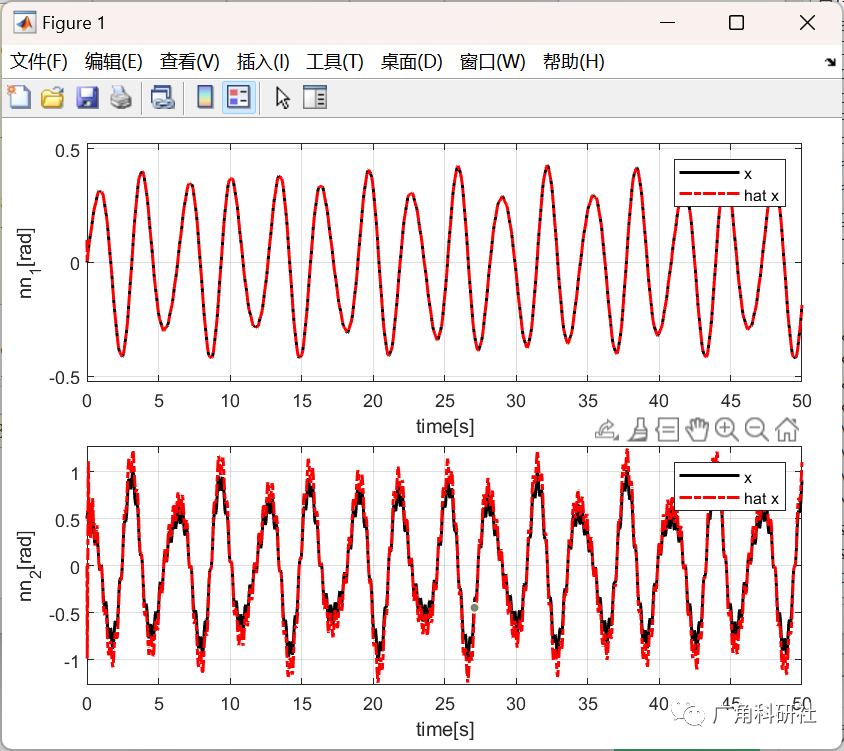
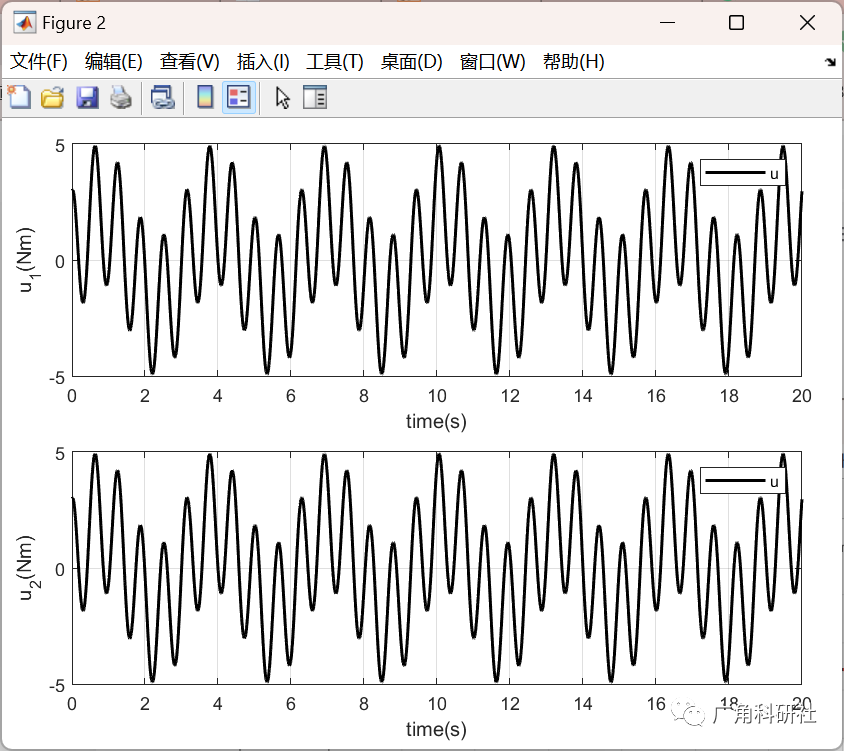
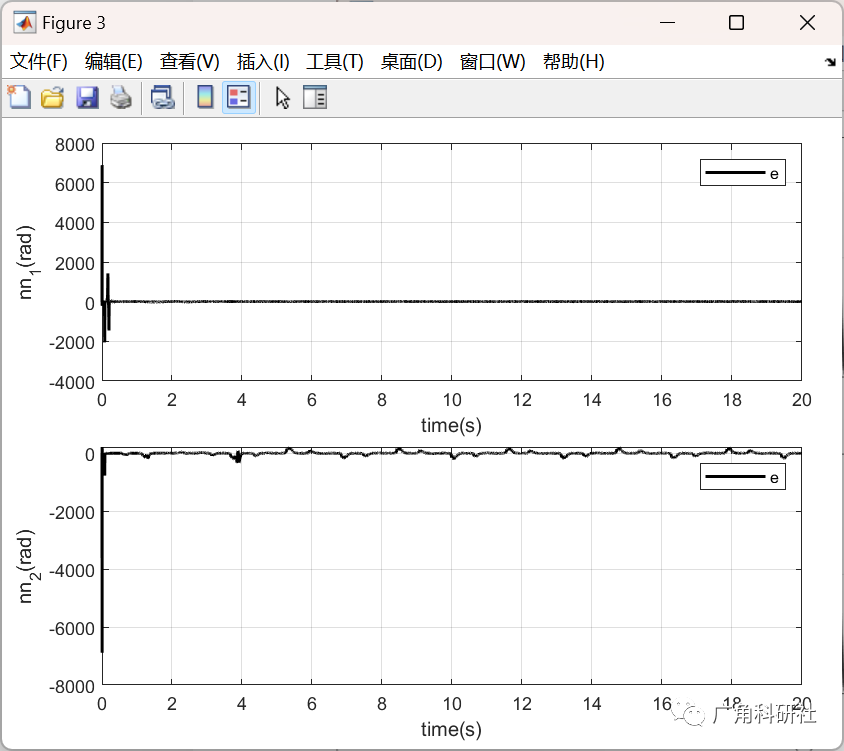
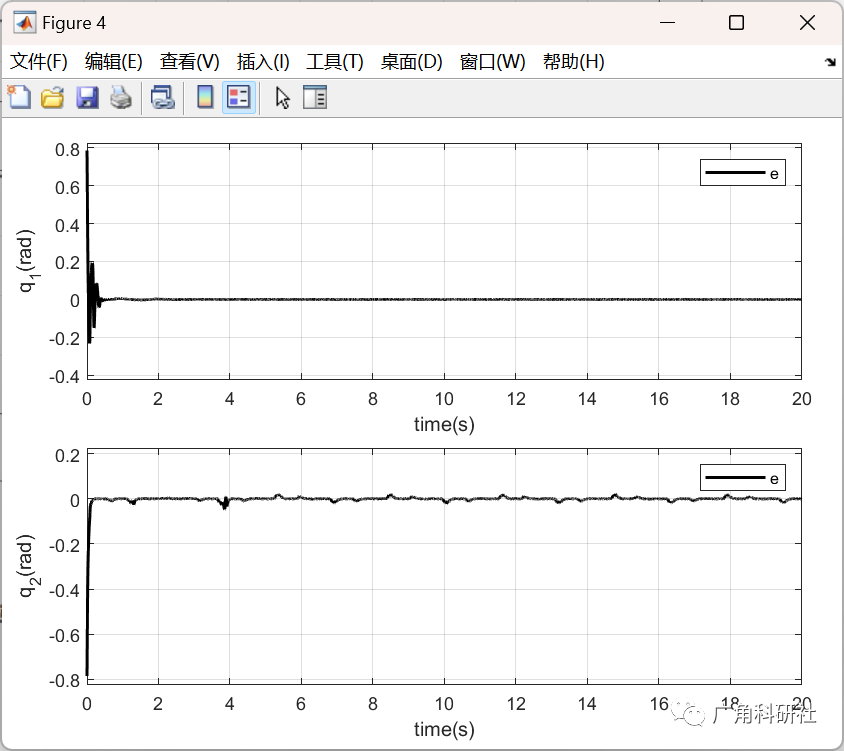
主函数部分代码:
clc; clear all;
addpath(genpath('.'));
% simulation setup
sim_period = 0.001;
t = 0:sim_period:20;
sample_size = size(t, 2);
% % reference trajectory
xd(1,:)=sin(t);
xd(2,:)=cos(t);
xd(3,:)=-sin(t);
% parameter of neural network
variance = 25;
Node = 7;
W1 = zeros(Node, 1);
W2 = zeros(Node, 1);
Mu1 = [-1:2/(Node-1):1]*1/3;
Mu2 = [-1:2/(Node-1):1]*1/3;
Mu = [Mu1; Mu2];
k1=0.01;k2=0.01;
F1= 500*eye(Node);
F2= .5*eye(Node);
% intial state
x(:,1) = [0.2; 0];
x_hat(:,1) = [0.1; 0];
global D K1 K2
H_bar = zeros(Node, 1);
for i=1:sample_size
x1 = x(1,i);
x2 = x(2,i);
x_hat1 = x_hat(1,i);
x_hat2 = x_hat(2,i);
% model
m=1;l=1;M=0.5;g=9.8;
fx=-0.5*m*g*l*sin(x1)/M;
gx=1/M;
% ann
y_tilde = x1 - x_hat(1,i);
H = zeros(Node,1);
for j=1:Node
H(j) = exp(-norm(x(:,i)-Mu(:,j))^2/(variance));
end
🎉3 参考文献
[1]王旭东,邵惠鹤.RBF神经网络理论及其在控制中的应用[J].信息与控制,1997(04):32-44.
👨💻4 Matlab代码
相关文章
- Matlab使用新发现1(小技巧:shell 命令、工程工作目录设置相关)
- matlab机械臂运动(2)
- 基于贝叶斯优化CNN-LSTM混合神经网络预测(Matlab代码实现)
- 【机会约束、鲁棒优化】机会约束和鲁棒优化研究优化【ccDCOPF】研究(Matlab代码实现)
- 配电系统的线性三相潮流研究【IEEE123节点】(Matlab代码实现)
- 基于多目标粒子群优化算法的计及光伏波动性的主动配电网有功无功协调优化(Matlab代码实现)
- 基于BP神经网络的电力负荷预测(Matlab代码实现)
- 基于粒子群由优化算法对微网中的分布式电源进行最优调度实现配电网稳定运行(Matlab代码实现)
- 计及光伏波动性的主动配电网有功无功协调优化(Matlab代码实现)
- 使用FORCE训练的脉冲神经网络中的监督学习(Matlab代码实现)
- 基于卷积神经网络进行股价预测(Matlab代码实现)
- DQN算法控制模拟旋转摆(Matlab代码实现)
- 使用BP神经网络诊断恶性乳腺癌(Matlab代码实现)
- 基于思维进化算法优化BP神经网络(Matlab代码实现)
- 基于BP神经网络、RBF神经网络以及PSO优化的RBF神经网络进行数据的预测(Matlab代码实现)
- 有监督学习神经网络的回归拟合——基于红外光谱的汽油辛烷值预测(Matlab代码实现)
- 以神经网络使用为例的Matlab和Android混合编程
- DBN+LSTM神经网络电容量回归分析,基于MATLAB编程的深度信念网络+lstm回归分析,
- 基于MATLAB编程的粒子群算法优化BP神经网络风电功率预测,基于PSO-BP的风电功率预测
- 基于MATLAB编程的萤火虫FA优化BP神经网络的回归分析
- 基于粒子群改进BP神经网络的回归分析,pso-bp的MATLAB编程实现
- 基于MATLAB编程的长短期神经网络LSTM的大豆期货价格预测
- ubuntu下matlab的无界面启动---命令行操作