
虚拟机VMware Workstation Pro连接gluon机器人记录
1、下载虚拟机和对应ROS系统
参考:MATLAB 2020b版本发布,下载试用版并上手使用记录。_matlab2018升级2020_JianRobSim的博客-CSDN博客中的3.1部分,避免一些ROS安装麻烦。因为ROS 2 Dashing and Gazebo - MATLAB & Simulink (mathworks.cn)中提供了安装好的ROS环境,并且gluon官网给的ROS版本正好是melodic刚好对应上。按照下面截图指示下载虚拟机和archive包含的虚拟机存档文件。
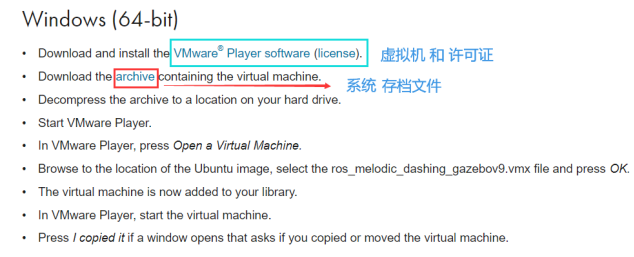
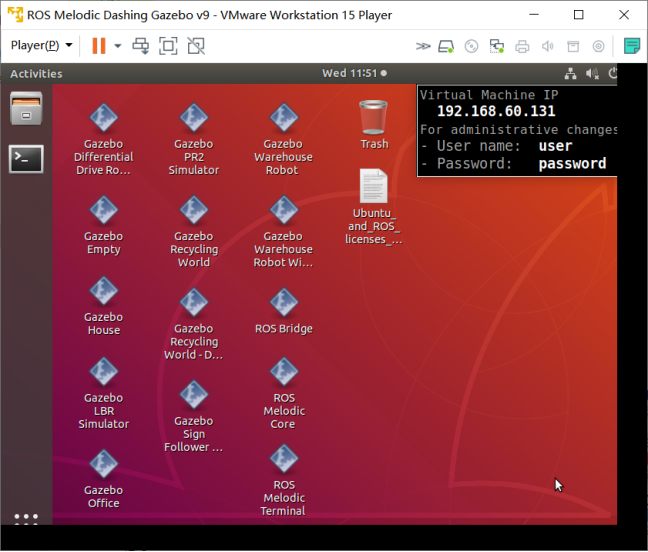
在虚拟机VMware中选择下载的虚拟机存档文件(解压)ROS Melodic Dashing Gazebo v9播放就可以打开虚拟机了。
2、下载innfos提供的软件包
参考:INNFOS仿生机器人双系统环境搭建(真·保姆级教学)!_工控小咸鱼的博客-CSDN博客打开一个终端输入如下代码,安装机器人软件。
git clone https://github.com/mintasca/innfos-gluon-controller.git通过git下载后进入到主目录,cd +路径
cd innfos-gluon-controller/接下来我们安装通讯所需的安装包
输入指令:
sudo apt install cmake在运行上述代码的时候,如果出现错误,则根据网上资料进行修改【【已解决】Could not get lock /var/lib/dpkg/lock-frontend_Bungehurst的博客-CSDN博客】。执行连接中的代码之后,重启虚拟机电脑,打开终端再次cd 到innfos路径下运行sudo apt install cmake。
3、网络配置
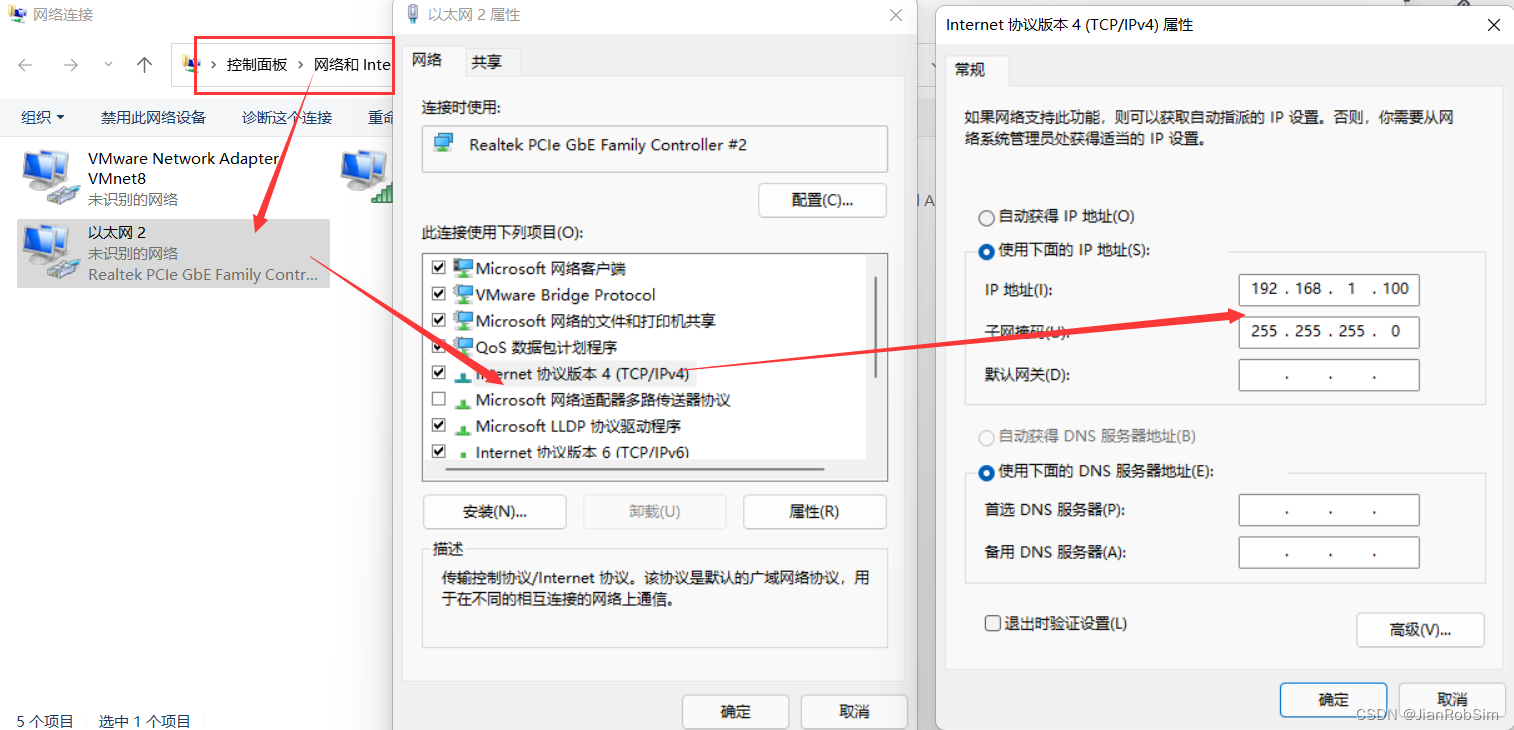
(1)修改主机windows连接的以太网IP信息。机器人以太网连接电脑之后,控制面板进入网络适配器修改以太网IP
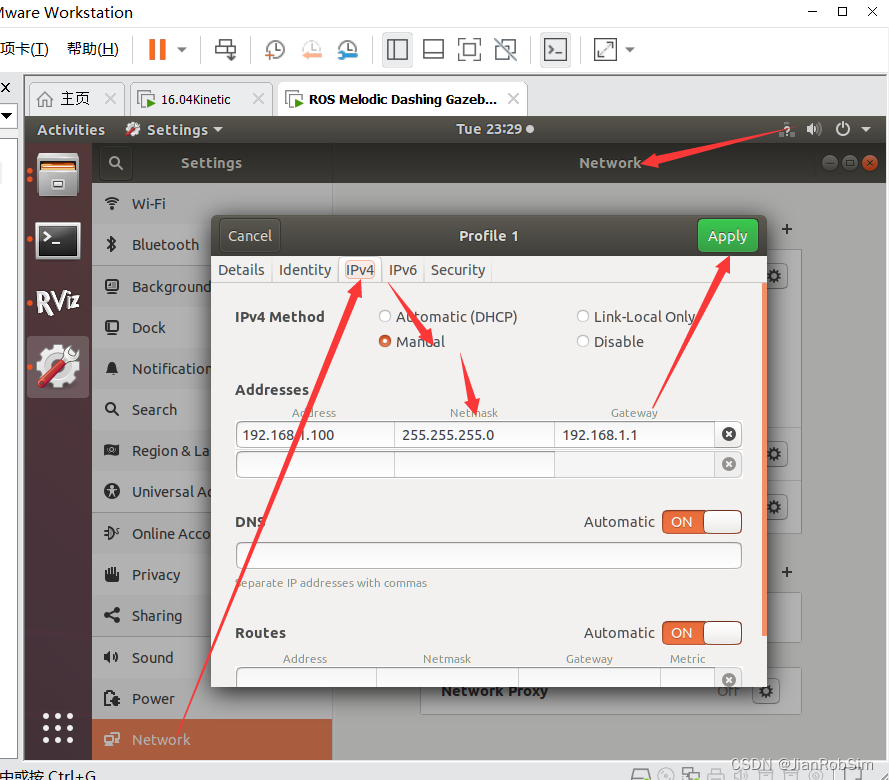
(2)虚拟机IP修改,首先桥接的方式连接以太网网络。
参考:VMware15 虚拟机分别设置连接笔记本的WLAN和以太网双网络 - Lee君 - 博客园 (cnblogs.com)

【通过桥接的方式连接以太网,我这里只连接了以太网,所以不能联网了,因此如果需要联网下载ROS的其他功能包之类的,在后续ROS控制中需要】当然也可以按上面连接的方式设置双网络,避免不断的切换网络连接模式。
然后设置虚拟机IP,如下:
然后可以ping 192.168.1.100已查看是否可以进行通信,如果可以证明虚拟机以太网可以连接到机器人ECB。
4、运行软件demo
% 打开终端
输入:
cd innfos-gluon-controller/
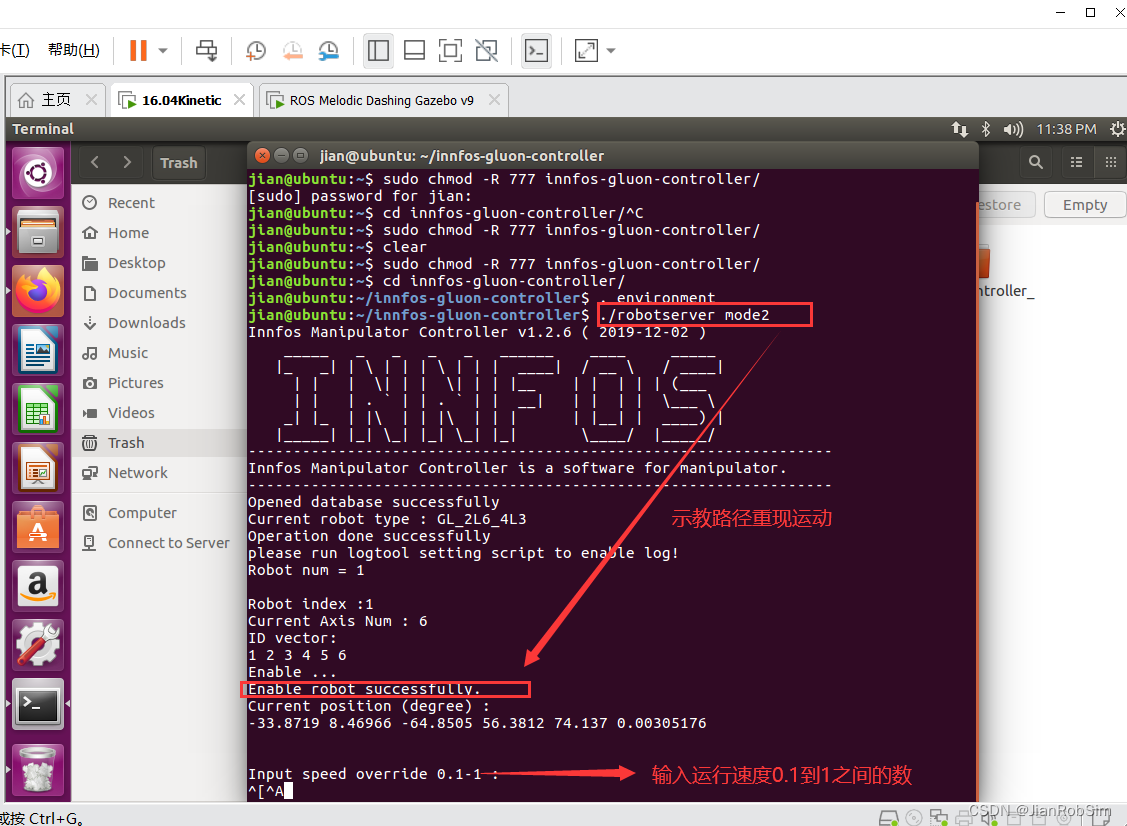
. environment %(.后面有一个空格),确认环境
接着输入 ./robotserver calibrate % :标定机器人原点
./robotserver tutorials %:运行向导模式中的四个已有程序
./robotserver mode0 % :关机
./robotserver mode1 %:拉动示教点位(连续)
./robotserver mode2 % :运行mode1记录的点位数据
./robotserver mode3 % :单点记录
./robotserver mode4 % :运行单点记录集合成的连续动作如果出现如下报错:
Permission denied则通过如下代码获得修改权限
sudo chmod -R 777 innfos-gluon-controller/
然后再尝试。
注意:机器人标定需要自己对准机器人各个关节的0刻度线。不像Baxter机器人一样自己运动后标定。断电之后【disable】机器人容易直接掉落,注意手扶住它......
5、ROS方式控制
环境配置【由于我们的ROS已经安装了部分功能包依赖项,前面的一些ROS安装步骤可以跳过,如果没有安装可以参考步骤进行】
推荐设置每次启动新 shell 时 ROS 环境变量都会自动添加到您的 bash 会话中,这会很方便:
$ echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
$ source ~/.bashrc如果您安装了多个 ROS 发行版,~/.bashrc必须只为你当前使用的版本提供setup.bash。
如果您只想更改当前 shell 的环境,则可以输入:
$ source /opt/ros/melodic/setup.bash构建包的依赖项
到目前为止,您已经安装了运行核心 ROS 包所需的东西。要创建和管理您自己的 ROS 工作区,有各种单独分发的工具和要求。例如,rosinstall是一种常用的命令行工具,它使您可以通过一个命令轻松下载 ROS 包的许多源代码树。
要安装此工具和其他用于构建 ROS 包的依赖项,请运行:
$ sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential使用以下内容,您可以初始化rosdep。
$ sudo rosdep init
$ rosdep update下载gluon软件包
目前支持linux-x86-64版本。
x86-64版本:
推荐使用64位ubuntu18.04系统。源码下载。打开一个新终端,依次输入以下命令
$ mkdir -p catkin_ws/src
$ cd catkin_ws/src访问下载链接下载机械臂软件或者直接执行以下命令
$ git clone https://github.com/mintasca/ros_gluon.git$ cd ..
$ git clone https://github.com/innfos/innfos-cpp-sdk.git
$ cp –r innfos-cpp-sdk/sdk src/ros_gluon/gluon/ActuatorController_SDK
$ cp –r innfos-cpp-sdk/sdk src/ros_gluon/gluon_control/ActuatorController_SDK上述步骤如果失败可以手动将innfos-cpp-sdk/sdk的SDK复制到src/ros_gluon/gluon/ActuatorController_SDK和src/ros_gluon/gluon_control/ActuatorController_SDK下面。
安装依赖包并编译
$ sudo apt-get install ros-melodic-ros-control-boilerplate
$ sudo apt-get install ros-melodic-moveit-visual-tools
$ sudo apt-get install ros-melodic-moveit
$ sudo apt-get install ros-melodic-joint-state-publisher-gui
$ sudo apt-get install ros-melodic-ros-controllers
$ cd catkin_ws
$ catkin_make配置运行环境
$ echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
$ echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
$ source ~/.bashrcTips: 上述操作只需一次操作,重新开启Terminal 终端窗口时自动设置。
仿真与控制
ECB 默认IP 地址是192.168.1.30, PC 的IP 地址需要配置为同网段的192.168.1.1xx;运行demo前,需要确保机械臂在正确的零位位置。
Rviz 控制模式:
$ roslaunch gluon display.launch正确运行后,在rviz界面中可以看到gluon 机械臂urdf模型,拖拉joint_state_publisher窗口的滑动条即可控制机械臂运动,界面中的模型和真实机械臂联动 。
相关文章
- Linux有问必答:如何在VMware ESXi虚拟机上设置静态MAC地址
- 解决vmware Invalid memory setting (sched.mem.min)
- 漏洞情报 | VMware Tools、VMRC 及 VMware App Volumes 本地提权漏洞
- 《深入学习VMware vSphere 6》——1.4 虚拟化服务器的底层管理
- 《VMware vSphere 6.0虚拟化架构实战指南》——第2章 安装配置VMware ESXi 6.0 2.1VMware vSphere 6.0虚拟化介绍
- zabbix监控vmware exsi系统
- vmware 虚拟机突然没网了,网络图标不见了,解决方法
- VMware虚拟机下载、安装教程
- 如何安装Vmware ESXi 6.7(图文介绍)
- 解决vmware 宿主机无法访问centos虚拟机问题
- Vmware 安装Ubuntu 20.04桌面版