
ECG信号处理——包括基本波检测、信号去噪、信号重建度量(Matlab代码实现)
目录
💥1 概述
心电图(ECG)信号自动分析与诊断是目前信号处理领域中的研究热点之一,其真正实现将有力地促进医疗事业的发展和人们健康水平的提高,也将是现代信号处理理论与技术和人工智能等在医疗领域中应用的重大突破。心电(图)信号自动分析与诊断系统的研究内容广泛,涉及的基础理论和关键技术繁多,是一个多学科交叉的庞大课题。到目前为止,现有的心电信号自动分析方法中还存在着诸多的缺陷和不足,在理论研究和实际应用方面仍有许多改进和创新的空间。针对这种现状,论文围绕基本波检测、信号去噪、信号重建度量三个方面的关键技术展开研究。
📚2 运行结果






🎉3 参考文献
[1]牛传莉. 心电信号预处理和波形检测算法的研究[D].北京交通大学,2009.
👨💻4 Matlab代码
主函数部分代码:
clc
clear all
close all;
N = 10000; % number of samples
NumCh = 8; % number of channels
fs = 500; % sampling rate
% the ratio between the different types of noise
w_bw = 5; % weight of baseline wander noise in the generated noise (for noisetype = 5)
w_em = 1; % weight of electrode movement noise in the generated noise (for noisetype = 5)
w_ma = 1; % weight of muscle artifact noise in the generated noise (for noisetype = 5)
M = 10800;
% original noise template
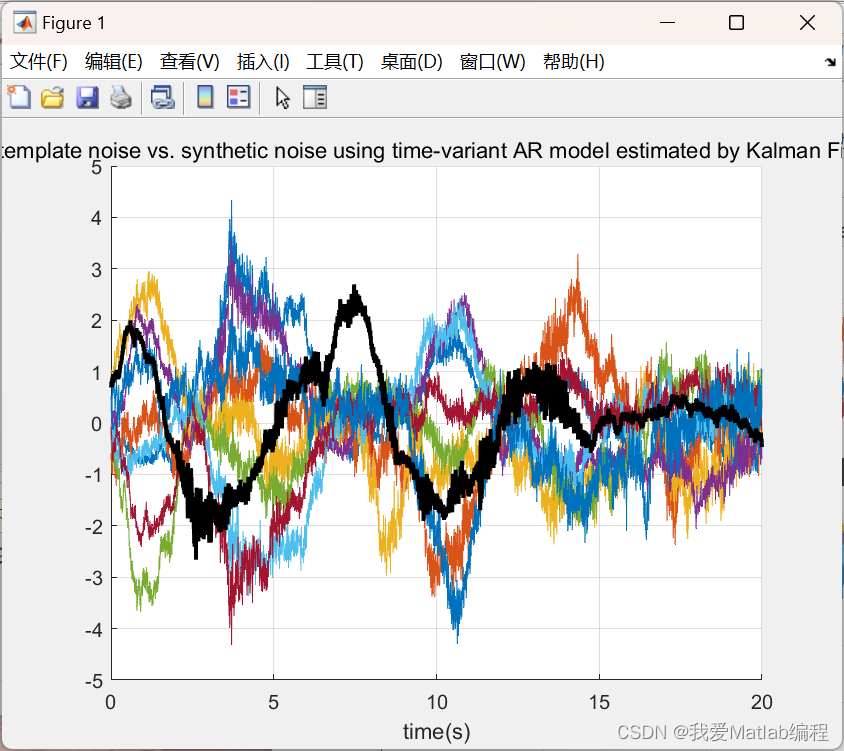
template = NoiseGenerator('mixture',1,0,M,360,[w_bw,w_em,w_ma],1000);
% parameters required for estimating the AR coefficients using a Kalman Filter (KF)
order = 12; % AR model order for modeling the ECG noise
[a0,e] = aryule(template,order); % a global AR model
q = (.05*max(abs(a0(2:end))))^2; % AR coefficients covariance
R = 1; % unit variance noise
p0 = 1e6*q; % covariance of the KF initial state
alpha = 1; % KF forgetting factor
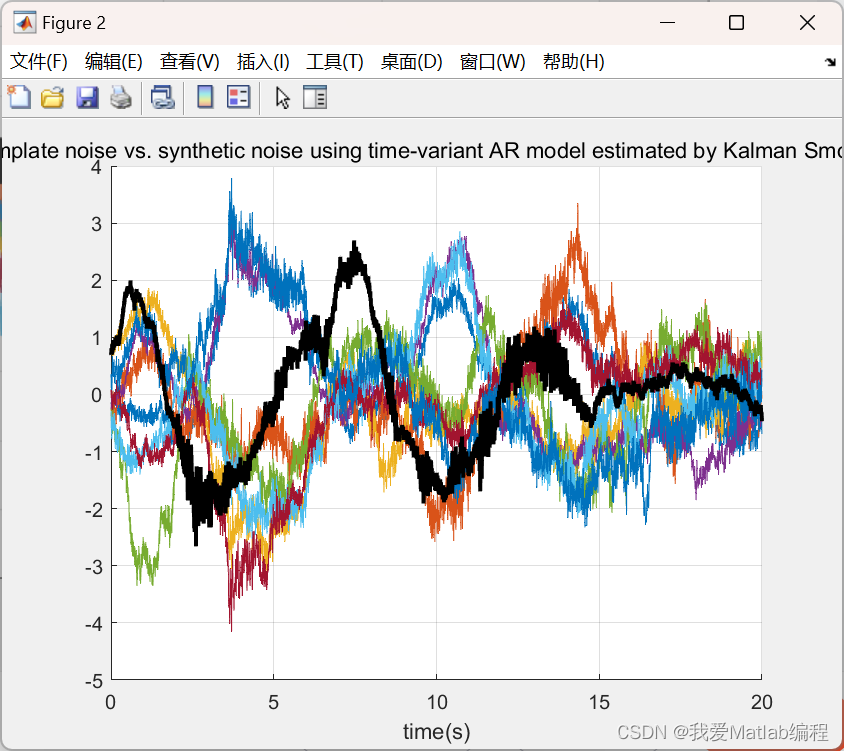
% time-variant AR parameter estimation using KF and Kalman Smoother (KS)
[Ahat,Asmoothed] = TimeVariantAR(template,order,a0(2:end)',q,R,p0,alpha);
% generating different instances of ECG noise using the time-variant AR parameters
noise1 = zeros(NumCh,N);
noise2 = zeros(NumCh,N);
for j = 1:NumCh,
x = randn(1,M);
y1 = zeros(M,1);
y2 = zeros(M,1);
for i = order+1:M-1,
y1(i) = (sqrt(1)*x(i)-Ahat(:,i)'*y1(i-1:-1:i-order))/1; % KF
y2(i) = (sqrt(1)*x(i)-Asmoothed(:,i)'*y2(i-1:-1:i-order))/1; % KS
end
相关文章
- Matlab JPEG详细介绍
- 【场景削减】基于 Kantorovich 距离的 SBR 算法场景削减研究(Matlab代码实现)
- 含光热电站的冷、热、电综合能源系统优化调度【节点网络】(Matlab代码实现)
- 【遗传算法、粒子群、改进遗传算法】基于智能算法的电力系统电网最优规划方案的研究(Matlab代码实现)
- 计及调度经济性的光热电站储热容量配置方法【IEEE30节点】(Matlab代码实现)
- 【风光场景生成】基于改进ISODATA的负荷曲线聚类算法(Matlab代码实现)
- 基于粒子群优化算法的电动汽车充放电V2G研究(Matlab代码实现)
- 考虑阶梯式碳交易机制与电制氢的综合能源系统热电优化(Matlab代码实现)
- 考虑实时市场联动的电力零售商鲁棒定价策略(Matlab代码实现)
- 【SCI电气】考虑不同充电需求的电动汽车有序充电调度方法(Matlab代码实现)
- 基于粒子群由优化算法对微网中的分布式电源进行最优调度实现配电网稳定运行(Matlab代码实现)
- 【不确定性研究】基于信息间隙决策理论的综合能源系统优化调度研究【改进粒子群优化算法求解】(Matlab代码实现)
- 【二阶锥规划】考虑气电联合需求响应的气电综合能源配网系统协调优化运行【IEEE33节点】(Matlab代码实现)
- 主动配电网故障恢复的重构与孤岛划分统一模型(Matlab代码实现)
- 含分布式电源的配电网日前两阶段优化调度模型(Matlab代码实现)
- 数据驱动的两阶段分布鲁棒(1-范数和∞-范数约束)的电热综合能源系统研究(Matlab代码实现)
- 【价格型需求响应】基于Logistic函数的负荷转移率模型需求响应研究(Matlab代码实现)
- 【Matlab代码】基于遗传算法和蚂蚁优化算法的路径优化问题
- 基于Dijkstra和A*算法的机器人路径规划(Matlab代码实现)
- 基于智能优化算法实现的机械臂避障路径规划(Matlab代码实现)
- 使用BP神经网络、RBF神经网络以及PSO优化的RBF神经网络对数据进行预测(Matlab代码实现)
- 使用FORCE训练的脉冲神经网络中的监督学习(Matlab代码实现)
- 基于鲸鱼优化算法的5G信道估计(Matlab代码实现)