
ros1的数据包和ROS2的数据包播放或转换的方法
2023-09-27 14:20:14 时间
一、ROS2和ROS1录制的文件格式的区别
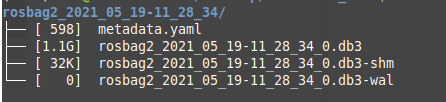
ros2录制的bag包文件,录制完后会生成一个目录,在目录下会生成多个文件,如下:
编辑
ros1 录制的bag文件,只有一个文件:例如 2021-05-19-19-10-18.bag
{kind=link}
二、在ros2的环境中播放ros1录制的bag包
2.1安装ros2和ros1环境
参考的链接为:
Ubuntu20.04 ROS1和ROS2同时安装及使用 - 古月居
2.1 安装rosbag_v2相关依赖和插件
1)安装ros1转换bridge
sudo apt update
sudo apt install ros-foxy-ros1-bridge
sudo apt install ros-foxy-ros1-rosbag-storage-vendor
2)# 安装catkin_tools(https://catkin-tools.readthedocs.io/en/latest/installing.html)
$ sudo sh \
-c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -sc` main" \
> /etc/apt/sources.list.d/ros-latest.list'
$ wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
$ sudo apt-get update
$ sudo apt-get install python3-catkin-tools
3)# 安装依赖与插件(https://www.ncnynl.com/archives/202209/5469.html)
$ sudo apt update
$ sudo apt install -y libroscpp-serialization0d \
ros-foxy-nmea-msgs \
ros-noetic-nmea-msgs
$ sudo apt install -y ros-foxy-rosbag2-bag-v2-plugins \
ros-foxy-rosbag2-storage \
ros-foxy-rosbag2-storage-default-plugins \
ros-foxy-ros2bag ros-galactic-rosbag2-transport
4)补全rosbag_v2相关依赖和插件
sudo apt install ros-foxy-rosbag2-bag-v2-plugins ros-foxy-rosbag2*
2.2 验证
安装完后直接到bag目录下去使用是错误的
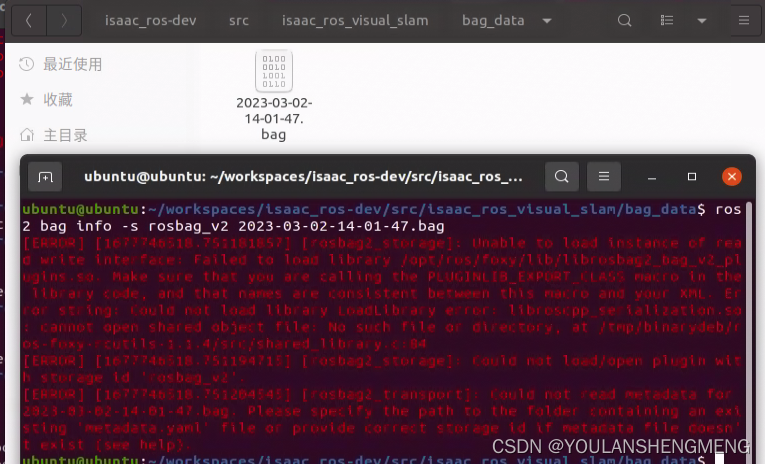
光导入ROS2的环境执行也是错误的
 按照参考博文的方法,先导入ROS1,再导入ROS2的环境,会出现下面的错误:
按照参考博文的方法,先导入ROS1,再导入ROS2的环境,会出现下面的错误:
ImportError: /opt/ros/foxy/lib/librosbag2_storage.so: undefined symbol: _ZNK12class_loader11ClassLoader15isLibraryLoadedEv

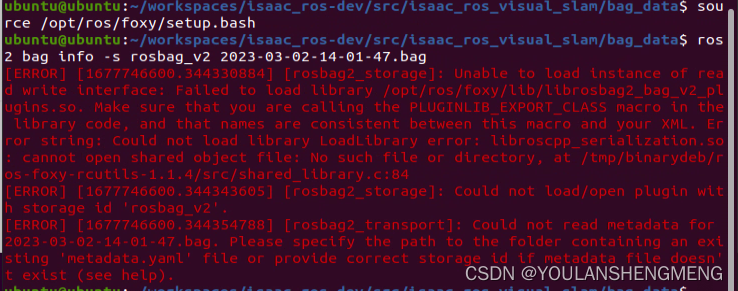
正确的方法是打开终端,输入以下的命令
source /opt/ros/foxy/setup.bash
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/opt/ros/noetic/lib
可以得到该bag包的详细信息

2.3 执行
source /opt/ros/galactic/setup.bash
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/opt/ros/noetic/lib
# 查看.bag信息,如上图,包含topic等信息
$ ros2 bag info -s rosbag_v2 your_bag_file.bag
# 回放.bag
$ ros2 bag play -s rosbag_v2 your_bag_file.bag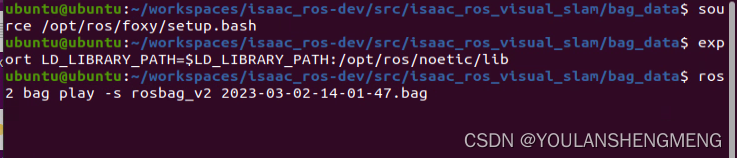
三、ros2环境中将ros1的bag包,转换成ros2的bag包
3.1 要直接把ros1的包转换成ros2的方法
参考链接:
安装:
pip install rosbags
将 rosbag1 转换为 rosbag2:
# Convert "foo.bag", result will be "foo/"
rosbags-convert foo.bag
# Convert "foo.bag", save the result as "bar"
rosbags-convert foo.bag --dst /path/to/bar
将 rosbag2 转换为 rosbag1(仅克隆存储库):
# Convert "foo", save the result as "foo.bag"
rosbags-convert-2to1 /path/to/foo
转换一些连续的 rosbag2 文件(仅克隆存储库):
# Convert "foo0" and "foo1", save the result as "foo0.bag" and "foo1.bag"
# The sequence number in std_msgs/Header is continued from foo0.bag to foo1.bag
rosbags-convert-2to1 /path/to/foo0 /path/to/foo1
3.2 ros包更改话题名字
GitHub - facontidavide/rosbag_editor: Create a rosbag from a given one, using a simple GUI
 使用方法,下载源码后,在ROS1中进行编译,然后执行。
使用方法,下载源码后,在ROS1中进行编译,然后执行。
rosrun rosbag_editor rosbag_editor
参考博文:
ROS2 回放 ros1.bag 文件?血泪总结_.bag文件_kinderkindme的博客-CSDN博客
ROS1与ROS2的bag包互换(包含自定义消息) - 古月居
Ubuntu20.04 ROS1和ROS2同时安装及使用 - 古月居
如何在ROS2中回放ROS1的bag包-rosbag_v2法_Not_Today_-的博客-CSDN博客
相关文章
- 踩准时钟节拍、玩转时间转换,鸿蒙轻内核时间管理有妙招
- java中string数组转换为list列表的方法
- 【VS开发】字符串进制等转换关系及方法
- Druid 从控制台(Druid console)从 SQL 脚本转换为 JSON 格式的方法
- C++-容器-string:char到int的转换【Ascii码强转:int(char);‘0‘转为48】【直接转换:char - ‘0‘】
- Pandas-高级处理(四):分组与聚合【分组:groupby、聚合统计:max/min/mean...、分组转换:transform、一般化Groupby方法:apply】【抛开聚合只谈分组没意义】
- 【转】给DataTable和DataRow扩展方法,直接转换为对象集合或对象
- PHP中文字符串编码转换
- C#字母与ASCII码的转换
- C语言:二进制与十进制相互转换
- 【Serde】转换错误类型
- Linux下时间格式转换及获取方法
- jdk8中奖Date转换为String格式的方法
- FastJson对于JSON格式字符串、JSON对象及JavaBean之间的相互转换
- 时间戳 和 日期 转换的方法 (含获取当前时间戳的方法)
- Python中的str与bytes之间的转换的三种方法
- 【Python基础】列表的基本操作:列表的数据统计、排序、遍历 || 关键字、函数、方法 || 列表的应用场景 || 元组的定义、循环遍历、应用场景 || 格式化字符 || 元组和列表之间的转换
- 从 postcss-pxtransform 源码到 Taro 跨端单位转换方案优化
- js数组与字符串的相互转换及保留两位小数的方法
- C# DataTable 和List之间相互转换的方法
- OpenCV最经典的3种颜色空间(cv2.cvtColor)及互相转换
- C语言中将数字转换为字符串的方法
- C语言 字符串和数字转换函数
- 用JavaScript将数字转换为大写金额
- Dynamics CRM 后台通过组织服务获取时间字段值的准确转换
- Python dateutil.parse 日期转换库安装使用方法
- Java 基础类型转换byte数组, byte数组转换基础类型
- pybitcointools源码分析之进制转换