
Matlab之数据回归分析 --- 最小二乘估计曲线拟合
文章目录
1、最小二乘估计的概念
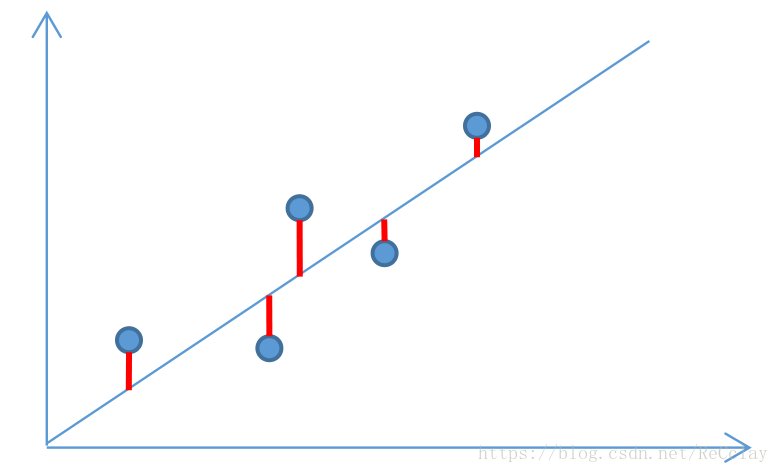
“二乘”意即平方的含义,所以这里也可以称为“最小平方估计”拟合,那么也就有了谁的平方的问题了,直观上理解就是测量值与统计估计值的偏差,工程上又叫残余误差。而“最小”意即所有的残余误差的平方和最小!
通过下图更直观理解,就是让所有红线分别平方,然后求和,所得的值最小!
2、Matlab直线拟合
2.1、直线拟合的数学推导
假设现有一组数据【x1,y1】【x2,y2】…【xn,yn】
设其拟合直线表达式为: (1) y = a + b x y=a+bx\tag{1} y=a+bx(1)
对应残余误差表达式为: (2) d i = y i − ( a + b x i ) d_{i}~ = y_{i} - (a+bx_{i})\tag{2} di =yi−(a+bxi)(2)
最小二乘登场:
(3) D i = ∑ i = 1 n d i 2 = ∑ i = 1 n ( y i − a − b x i ) 2 D_{i}=\sum_{i=1} ^{n} d_{i}^{2} = \sum_{i=1} ^{n}(y_{i}-a-bx_{i})^{2}\tag{3} Di=i=1∑ndi2=i=1∑n(yi−a−bxi)2(3)
因为使得平方和最小,意即求导为0,那么我们就分别对该式子的系数 a 、 b a、b a、b求偏导可得到如下等式:
(4) { ∂ D i ∂ a = ∑ i = 1 n 2 ( y i − a − b x i ) ( − 1 ) = − 2 ( ∑ i = 1 n y i − n a − b ∑ i = 1 n x i ) = 0 ∂ D i ∂ b = ∑ i = 1 n 2 ( y i − a − b x i ) ( − x i ) = − 2 ( ∑ i = 1 n x i y i − a ∑ i = 1 n x i − b ∑ i = 1 n x i 2 ) = 0 \begin{cases} \frac {\partial D_{i}} {\partial a} = \sum\limits _{i=1}^{n}2(y_{i}-a-bx_{i})(-1) = -2(\sum\limits _{i=1} ^{n}y_{i}-na-b\sum\limits _{i=1} ^{n} x_{i}) = 0 \\ \\ \frac {\partial D_{i}} {\partial b} = \sum\limits _{i=1}^{n}2(y_{i}-a-bx_{i})(-x_{i}) = -2(\sum\limits _{i=1} ^{n}x_{i}y_{i}-a\sum\limits _{i=1}^{n} x_{i}-b\sum\limits _{i=1} ^{n} x_{i}^2) = 0\tag{4} \end{cases} ⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧∂a∂Di=i=1∑n2(yi−a−bxi)(−1)=−2(i=1∑nyi−na−bi=1∑nxi)=0∂b∂Di=i=1∑n2(yi−a−bxi)(−xi)=−2(i=1∑nxiyi−ai=1∑nxi−bi=1∑nxi2)=0(4)
整理可得,
(5) { ( ∑ i = 1 n y i − n a − b ∑ i = 1 n x i ) = 0 ∑ i = 1 n x i y i − a ∑ i = 1 n x i − b ∑ i = 1 n x i 2 ) = 0 ⟹ { a = y ‾ − b x ‾ b = x y ‾ − x ‾ y ‾ x 2 ‾ − ( x ‾ ) 2 \begin{cases} (\sum \limits_{i=1} ^{n}y_{i}-na-b\sum\limits _{i=1} ^{n} x_{i}) = 0 \\ \\ \sum\limits _{i=1} ^{n}x_{i}y_{i}-a\sum\limits _{i=1}^{n} x_{i}-b\sum\limits _{i=1} ^{n} x_{i}^2) = 0 \end{cases}\Longrightarrow \begin{cases} a=\overline{y}-b\overline{x} \\ \\ b=\frac{\overline{xy}-\overline{x}\overline{y}}{\overline{x^2}-(\overline{x})^2} \end{cases}\tag{5} ⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧(i=1∑nyi−na−bi=1∑nxi)=0i=1∑nxiyi−ai=1∑nxi−bi=1∑nxi2)=0⟹⎩⎪⎨⎪⎧a=y−bxb=x2−(x)2xy−xy(5)
2.2、Matlab代码
clc;
clear;
%录入X轴数据
for a = 1:30
x(a) = a-1;
end
%录入Y轴数据
y=[1,2,3,8,6,9,5,4,8,5,9,19,16,12,15,24,22,36,40,40,32,32,36,39,52,52,56,57,62,69];
figure;
plot(x,y,'.');%画点
hold on
b = ( mean(x*y(:)) - mean(x(:)).*mean(y(:)) ) / (mean(x*x(:))-mean(x(:))^2 );
a = mean(y(:)) - b*mean(x(:));
y1 = a+b*x;
plot(x,y1);
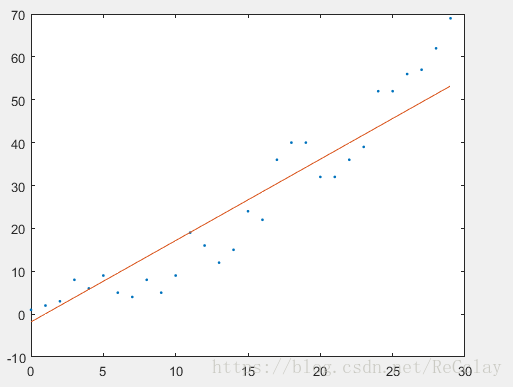
2.3、绘制效果
3、多项式曲线拟合
3.1、曲线拟合的数学推导
同时,假设有一组数据【x1,y1】【x2,y2】…【xn,yn】
设拟合多项式表达式为:
(1)
y
=
a
+
a
1
x
+
.
.
.
+
a
k
x
k
y=a+a_{1}x+...+a_{k}x^{k}\tag{1}
y=a+a1x+...+akxk(1)
残余误差和表达式为:
(2) D 2 = ∑ i = 1 n [ y i − ( a 0 + a 1 x i + . . . + a k + x i k ) ] 2 D^{2}=\sum_{i=1}^{n}[y_{i}-(a_{0}+a_{1}x_{i}+...+a_{k}+x_{i}^{k})]^{2}\tag{2} D2=i=1∑n[yi−(a0+a1xi+...+ak+xik)]2(2)
为求平方和最小,我们只需对系数 a 0 a k a_{0}~a_{k} a0 ak挨个求偏导,即可得到:
(3) { − 2 ∑ i = 1 n [ y i − ( a 0 + a 1 x i + . . . + a k x i k ) ] = 0 − 2 ∑ i = 1 n [ y i − ( a 0 + a 1 x i + . . . + a k x i k ) ] x i = 0 . . . . . . − 2 ∑ i = 1 n [ y i − ( a 0 + a 1 x i + . . . + a k x i k ) ] x i k = 0 \begin{cases} -2\sum\limits _{i=1}^{n}[y_{i}-(a_{0}+a_{1}x_{i}+...+a_{k}x_{i}^{k})] = 0 \\ -2\sum\limits _{i=1}^{n}[y_{i}-(a_{0}+a_{1}x_{i}+...+a_{k}x_{i}^{k})]x_{i} = 0\\ ......\\ -2\sum\limits _{i=1}^{n}[y_{i}-(a_{0}+a_{1}x_{i}+...+a_{k}x_{i}^{k})]x_{i}^{k} = 0 \end{cases}\tag{3} ⎩⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎧−2i=1∑n[yi−(a0+a1xi+...+akxik)]=0−2i=1∑n[yi−(a0+a1xi+...+akxik)]xi=0......−2i=1∑n[yi−(a0+a1xi+...+akxik)]xik=0(3)
上述等式继续化简可得:
(4) { a 0 n + a 1 ∑ i = 1 n x i + . . . + a k ∑ i = 1 n x i k = ∑ i = 1 n x i 0 y i a 0 ∑ i = 1 n x i + a 1 ∑ i = 1 n x i 2 + . . . + a k ∑ i = 1 n x i k + 1 = ∑ i = 1 n x i 1 y i . . . a 0 ∑ i = 1 n x i k + a 1 ∑ i = 1 n x i k + 1 + . . . + a k ∑ i = 1 n x i 2 k = ∑ i = 1 n x i k y i \begin{cases} a_{0}n+a_{1}\sum\limits_{i=1}^{n}x_{i}+...+a_{k}\sum\limits _{i=1}^{n}x_{i}^{k}=\sum\limits _{i=1}^{n}x_{i}^{0}y_{i}\\ a_{0}\sum\limits_{i=1}^{n}x_{i}+a_{1}\sum\limits_{i=1}^{n}x_{i}^{2}+...+a_{k}\sum\limits_{i=1}^{n}x_{i}^{k+1}=\sum\limits_{i=1}^{n}x_{i}^{1}y_{i}\\ ...\\ a_{0}\sum\limits_{i=1}^{n}x_{i}^{k}+a_{1}\sum\limits_{i=1}^{n}x_{i}^{k+1}+...+a_{k}\sum\limits_{i=1}^{n}x_{i}^{2k}=\sum\limits_{i=1}^{n}x_{i}^{k}y_{i} \end{cases}\tag{4} ⎩⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎧a0n+a1i=1∑nxi+...+aki=1∑nxik=i=1∑nxi0yia0i=1∑nxi+a1i=1∑nxi2+...+aki=1∑nxik+1=i=1∑nxi1yi...a0i=1∑nxik+a1i=1∑nxik+1+...+aki=1∑nxi2k=i=1∑nxikyi(4)
将这些等式表达成矩阵的形式,可以得到如下矩阵:
(5) [ n ∑ i = 1 n x i ⋯ ∑ i = 1 n x i k ∑ i = 1 n x i ∑ i = 1 n x i 2 ⋯ ∑ i = 1 n x i k + 1 ⋮ ⋮ ⋱ ⋮ ∑ i = 1 n x k ∑ i = 1 n x i k + 1 ⋯ ∑ i = 1 n x i 2 k ] [ a 0 a 1 ⋮ a k ] = [ ∑ i = 1 n y i ∑ i = 1 n x i y i ⋮ ∑ i = 1 n x i k y i ] \begin{bmatrix} n & \sum\limits_{i=1}^{n}x_{i} & \cdots & \sum\limits_{i=1}^{n}x_{i}^{k} \\ \sum\limits_{i=1}^{n}x_{i} & \sum\limits_{i=1}^{n}x_{i}^{2} & \cdots & \sum\limits_{i=1}^{n}x_{i}^{k+1} \\ \vdots & \vdots & \ddots & \vdots \\ \sum\limits_{i=1}^{n}x_{k} & \sum\limits_{i=1}^{n}x_{i}^{k+1} & \cdots & \sum\limits_{i=1}^{n}x_{i}^{2k} \\ \end{bmatrix} \begin{bmatrix} a_{0}\\a_{1}\\ \vdots \\ a_{k} \end{bmatrix}= \begin{bmatrix} \sum\limits_{i=1}^{n}y_{i} \\ \sum\limits_{i=1}^{n}x_{i}y_{i} \\ \vdots \\ \sum\limits_{i=1}^{n}x_{i}^{k}y_{i} \end{bmatrix} \tag{5} ⎣⎢⎢⎢⎢⎢⎢⎢⎢⎡ni=1∑nxi⋮i=1∑nxki=1∑nxii=1∑nxi2⋮i=1∑nxik+1⋯⋯⋱⋯i=1∑nxiki=1∑nxik+1⋮i=1∑nxi2k⎦⎥⎥⎥⎥⎥⎥⎥⎥⎤⎣⎢⎢⎢⎡a0a1⋮ak⎦⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎢⎢⎢⎢⎡i=1∑nyii=1∑nxiyi⋮i=1∑nxikyi⎦⎥⎥⎥⎥⎥⎥⎥⎥⎤(5)
然后接着将这个范德蒙德行列式化简,可以得到:
(6)
[
1
x
1
⋯
x
1
k
1
x
2
⋯
x
2
k
⋮
⋮
⋱
⋮
1
x
n
⋯
x
n
k
]
[
a
0
a
1
⋮
a
k
]
=
[
y
1
y
2
⋮
y
n
]
\begin{bmatrix} 1 & x_{1} & \cdots & x_{1}^{k} \\ 1 & x_{2} & \cdots &x_{2}^{k} \\ \vdots & \vdots & \ddots & \vdots \\ 1 & x_{n} & \cdots & x_{n}^{k} \\ \end{bmatrix} \begin{bmatrix} a_{0}\\a_{1}\\ \vdots \\ a_{k} \end{bmatrix}= \begin{bmatrix} y_{1}\\y_{2}\\ \vdots \\ y_{n} \end{bmatrix} \tag{6}
⎣⎢⎢⎢⎡11⋮1x1x2⋮xn⋯⋯⋱⋯x1kx2k⋮xnk⎦⎥⎥⎥⎤⎣⎢⎢⎢⎡a0a1⋮ak⎦⎥⎥⎥⎤=⎣⎢⎢⎢⎡y1y2⋮yn⎦⎥⎥⎥⎤(6)
接着我们的分析 X A = Y XA=Y XA=Y,那么 A = X − 1 Y A=X^{-1}Y A=X−1Y。由于这里需求 X X X的逆矩阵,求逆矩阵的前提是满秩,但是这里可能没有办法满足这一点,所以我们利用广义矩阵可以得到, A = ( X T ∗ X ) − 1 ∗ X T ∗ Y A=(X^{T}*X)^{-1}*X^{T}*Y A=(XT∗X)−1∗XT∗Y,这样便得到了系数矩阵 A A A,我们也就进一步得到了拟合曲线。
3.2、Matlab代码
clc;
clear;
%录入X轴数据
for a = 1:30
x(a) = a-1;
end
%录入Y轴数据
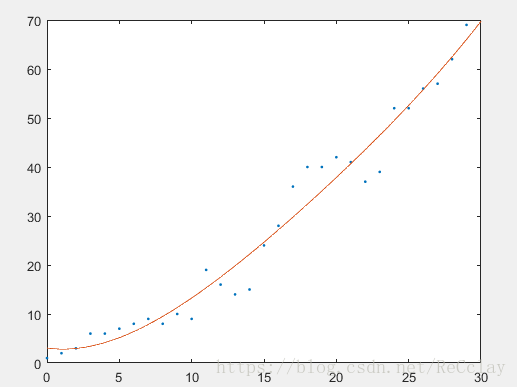
y=[1,2,3,6,6,7,8,9,8,10,9,19,16,14,15,24,28,36,40,40,42,41,37,39,52,52,56,57,62,69];
figure
plot(x,y,'.');%画点
hold on
k=5;%阶数 阶数可以在1-5之间更改看效果,记得每次更改了之后clear workspace然后在运行
%X数据录入
for a = 0:k
for i = 1:30
X(i,(a+1)) = x(i).^(a);
end
end
Y = y';
A = (X'*X)^-1*X'*Y;%求矩阵系数A
A = A';%转置矩阵方便使用
z = 0:0.1:30;
if k==5
y1 = A(1)+A(2).*z+A(3).*z.^2+A(4).*z.^3+A(5).*z.^4+A(6).*z.^5;%最后表达式用于绘图
elseif k==4
y1 = A(1)+A(2).*z+A(3).*z.^2+A(4).*z.^3+A(5).*z.^4;%最后表达式用于绘图
elseif k==3
y1 = A(1)+A(2).*z+A(3).*z.^2+A(4).*z.^3;%最后表达式用于绘图
elseif k==2
y1 = A(1)+A(2).*z+A(3).*z.^2;%最后表达式用于绘图
elseif k==1
y1 = A(1)+A(2).*z;%最后表达式用于绘图
end
plot(z,y1);
hold off
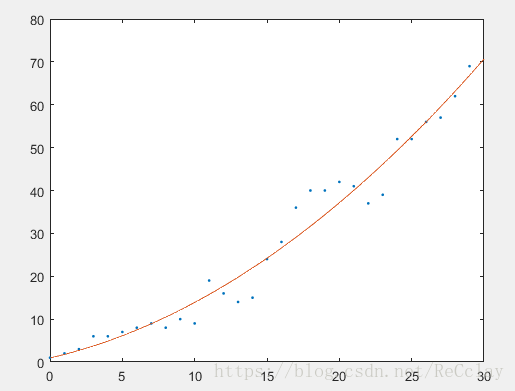
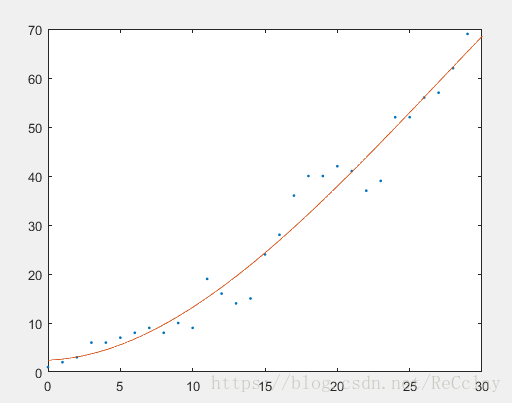
3.3、绘制效果
k=1

k=2
k=3
k=4
k=5

相关文章
- matlab在处理图像时为什么把数据转换为double型?
- Matlab之Kalman:用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法
- 基于多目标粒子群优化算法的计及光伏波动性的主动配电网有功无功协调优化(Matlab代码实现)
- (Matlab实现)基于蒙特卡洛模拟的大规模电动车充电模型
- 基于BP神经网络、RBF神经网络以及PSO优化的RBF神经网络进行数据的预测(Matlab代码实现)
- 【无人车】用于无人地面车辆的路径跟踪算法(Matlab代码实现)
- 多传感器时频信号处理:多通道非平稳数据的分析工具(Matlab代码实现)
- SVM 用于将数据分类为两分类或多分类(Matlab代码实现)
- 【信号处理】时序数据中的稀疏辅助信号去噪和模式识别(Matlab代码实现)
- 基于MATLAB的车牌识别系统研究(Matlab代码实现)
- 【MATLAB】MATLAB 仿真 — 基于matlab的QPSK系统仿真
- 【图像处理】基于MATLAB的方向离散余弦变换(DCT)和主成分分析(PCA)图像融合
- 基于OFDM调制解调通信系统的频偏估计和采样时钟估计matlab仿真
- m基于LDPC+QPSK通信链路误码率matlab仿真
- m基于simulink的16QAM和2DPSK通信链路仿真,并通过matlab调用simulink模型得到误码率曲线
- 基于PSO粒子群优化的SVM(PSO-SVM)的短期电力负荷预测matlab仿真
- 基于LSTM网络的时间序列数据预测matlab性能仿真
- 基于kmeans算法的数据聚类matlab仿真
- MATLAB-RGB转YUV和YCbCr
- IEEE69节点数据(Matlab)
- 社交网络搜索算法SNS代码(Matlab实现)
- 【模型预测控制】低数据极限下非线性动力学稀疏辨识模型预测控制(Matlab代码实现)
- 【状态估计】带观测滞后多传感器系统的改进协方差交叉融合Kalman滤波器(Matlab代码实现)
- 【灵敏度分析】用于从单细胞FRET数据中提取灵敏度分布(Matlab代码实现)
- matlab 同态滤波
- Matlab Tips: 结构体递归式打印--Dump matlab struct content recursively
- Matlab使用笔记(十):生成Simulink模型记录的Dataset类型数据
- 将数据导入到MATLAB