
GNSS说第(七)讲---自适应动态导航定位(八)---抗差自适应滤波
定位 动态 --- 导航 适应 滤波
2023-09-11 14:20:29 时间
GNSS说第(七)讲—自适应动态导航定位(八)—抗差自适应滤波
抗差自适应滤波
概述
运动定位与导航一般应用Kalman滤波算法。可靠的Kalman滤波算法要求有可靠的函数模型、随机模型以及合理的估计方法。然而,运动物体一般难以确保规则运动,因而精确的函数模型的构造十分困难;随机模型先验信息的获取一般都是基于验前统计信息﹐而任何统计信息都有可能失真,尤其是难以精确表征当前物理现实和观测现实。于是围绕如何利用当前观测信息和状态估值更新先验信息和补偿运动方程误差﹐成为广大工程应用领域尤其动态导航定位领域研究的热点问题之一。在Kalman滤波中,这种由估计过程自适应地调整﹑更新先验信息的算法称为自适应Kalman滤波。
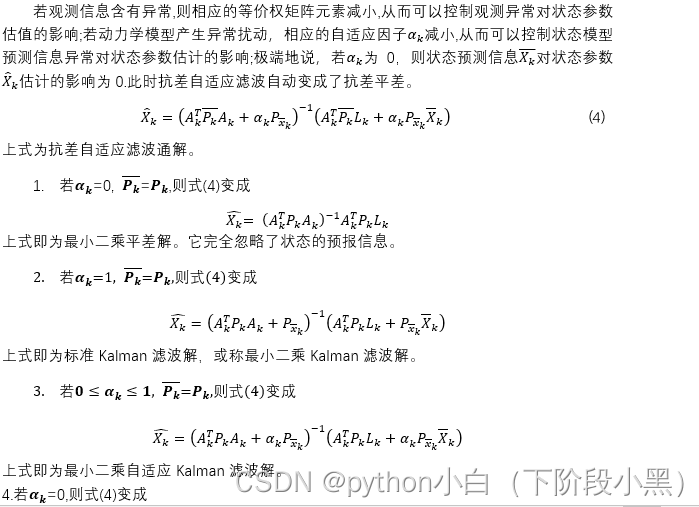
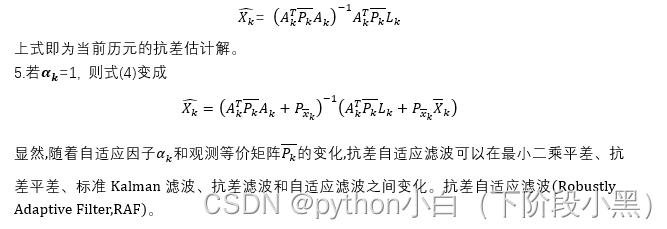
我们构建的抗差自适应滤波的基本思想是﹐当观测值存在异常,则对观测值采用抗差估计原则;当动力模型存在异常误差时,将动力模型信息作为一个整体﹐采用统一的自适应因子调整动力学模型信息对状态参数的整体贡献。
抗差自适应Kalman滤波原理
自由极值原理
利用抗差估计原理可以实现动态系统的自适应滤波。
设状态预测信息向量的误差方程为
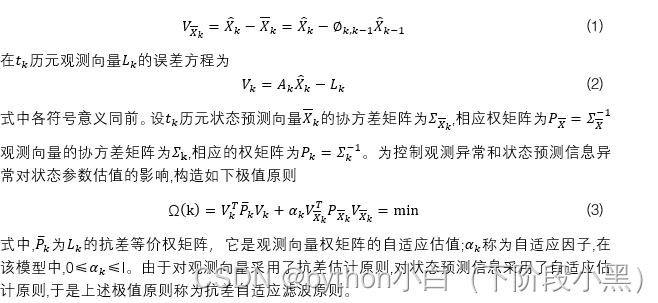
自适应滤波
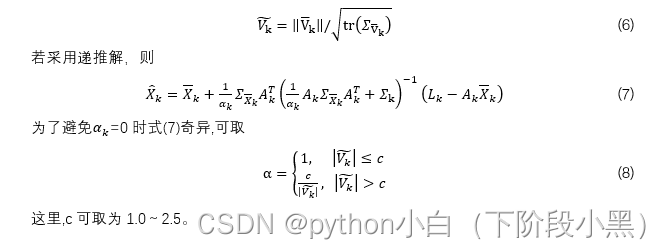
由于预测残差向量能较好地反映扰动异常,尤其当观测信息不足以解算当前历元的状态参数参考值时,我们已不能采用状态参数不符值构造自适应因子。这里可采用预测残差构造自适应因子ak(徐天河,杨元喜,2000; Yang and Gao,2006b)。若用三段函数法构造自适应因子,则新的自适应因子可写成

相关文章
- C#定位文件位置并修改字节数据
- 无人车系统中复杂场景定位技术
- 技术分享 | 自动化测试中如何高效定位元素?
- 自己动手构造编译系统:编译、汇编与链接2.5.3 重定位
- 阿里 Goldeneye 四个环节落地智能监控:预测、检测、报警及定位
- android 定位
- Selenium如何定位动态id/class的元素?
- 堆栈分析-服务器问题定位
- 如何及时定位到非必现问题?接口慢查询和接口报错的及时追踪。
- Verizon收购地图创企SocialRadar 强化MapQuest的定位数据
- 一步一步搭建前端监控系统:如何定位前端线上问题?
- RTKLIB专题学习(七)---精密单点定位实现初识(二)
- GNSS说第(七)讲---自适应动态导航定位(七)---抗差估计理论介绍
- GNSS说第(七)讲---自适应动态导航定位(六)---导航解算中的误差探测、诊断与修复
- GNSS说第(七)讲---自适应动态导航定位(五)---运动载体的动态模型
- GNSS说第(七)讲---自适应动态导航定位(四)---Kalman滤波
- GNSS说第(七)讲---自适应动态导航定位(二)---贝叶斯估计
- 【web前端(十七)】html_相对定位
- 智慧工地大型机械监测北斗定位工业终端解决方案
- GPS定位函数
- 不得不说--自动化测试元素定位
- Appium定位元素常用的方式
- App中h5页面定位元素