
惯性导航原理(五)-IMU误差分类(上)
原理 分类 误差
2023-09-11 14:20:29 时间
传感器误差类型
静态误差(加性误差)
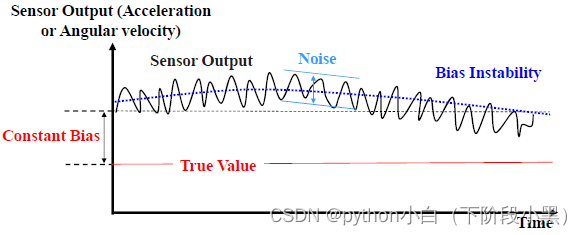
静止不动时就表现出来,输出的误差;零偏Bias(加速度计和陀螺的零位偏置),噪声Noise
动态误差(乘性误差)
运动起来才表现出来的误差:
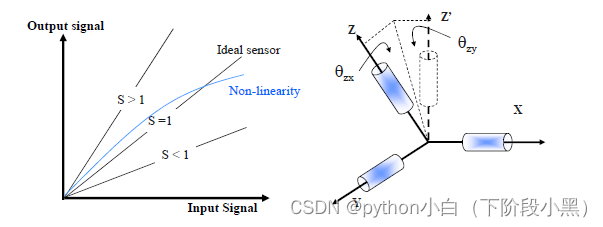
比例因子误差Scale factor
包含非线性non-linearity
轴偏移/轴交叉/交轴耦合(Axes misalignment / cross-axis)
上述三个类型写成误差表达式的时候,是与真实输入相乘,才能得到误差的数值,也就是它们只是一个系数
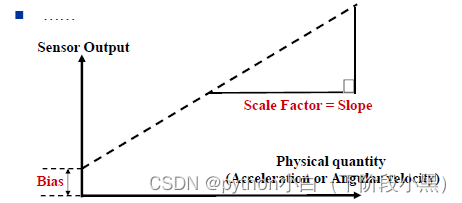
上图中,横轴为理想输入(真实输入),纵轴是传感器输出;理想情况下是过原点的直线,斜率为1的;但实际上不过原点(零偏),斜率不为1(比例因子误差),也不可能是直线(非线性误差);比如是x方向的输出,只与x方向的输入有关,但是其他轴有输入时,x轴可能还有输出(这就是交轴耦合)
传感器误差的成分
基本的误差成分
- 常值误差(
Constant error),即静止不动的时候,就有的一个误差,也就是零偏误差,其中包含不变的部分,就是常值误差。 - 重复性(
Repeatability)-- multiple runs,指的是每次上电,零偏误差的差异,就是零偏的重复性误差,或叫逐次上电重复性误差 - 稳定性(
Stability)-- within one run,本次上电稳定了,热平衡了,但是使用过程中,零偏还是有起伏,所以就是零偏的稳定性 - 噪声和带宽(
Noise&Band width),噪声即为快速变化的,高频的误差成分 - 热敏感度(
Thermal sensitivity,温漂)
确定性和随机性
一般情况,常值误差为确定性误差
稳定性、噪声、重复性为随机性误差
静态误差
以零偏为例来理解不同的误差成分
- 常值零偏
- 零偏稳定性,噪声
动态误差
比例因子:
- 输出被测量的信号/输入物理量
非线性:
- 随输入信号变化的比例因子
轴偏移/轴交叉:
- 每个轴的输出受到其它两个轴的输入的影响
噪声(Noise )
噪声
- 高频误差,完全随机(相邻历元不相关)
- 白噪声模型:功率谱密度在整个频域内均匀分布的噪声
- 实际白噪声的带宽
- 别名:
angular random walk(ARW,角度随机游走,陀螺角速率白噪声积分的随机游走) &velocity random walk(VRW,速度随机游走)
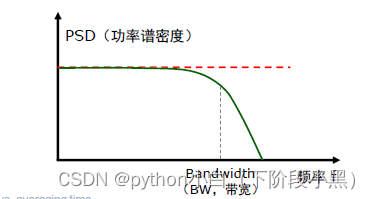
对于上图的功率谱密度(单位频率上的功率),白噪声随着频率或频点的变化,其功率谱密度不变,即图中红色虚线部分;总功率是将单位频点上的功率积分得到的;但现实中并没有这种理想的白噪声(实际中可能是绿色曲线),因为频率不可能是无穷频率;这时候,只需要我们传感器的感知带宽覆盖被测信号的带宽,那么对于被测信号来说,它经历的就是白噪声了,这样用白噪声对加速度计或陀螺传感器进行建模就没有任何问题了。
白噪声模型参数
功率谱密度(PSD): (信号单位)2/Hz
- 常用PSD单位开根号来表示: (信号单位)/sqrt(Hz)
谱密度单位
- 角速度:rad/s/sqrt(Hz), deg/s/sqrt(Hz), deg/sqrt(hr)
- 加速度:m/s2/sqrt(Hz), m/s/sqrt(hr), mGal/sqrt(Hz)