
惯性导航原理(三)-加速度计应用+陀螺仪应用
2023-09-11 14:20:29 时间
文章目录
前情回顾
1海里=1.8KM
1海里对应经纬度变化为1角分
加速度计应用的现状
惯性导航未来发展主要取决于器件,器件决定系统
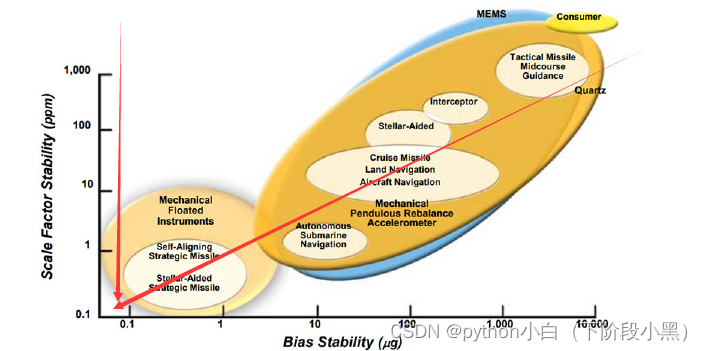
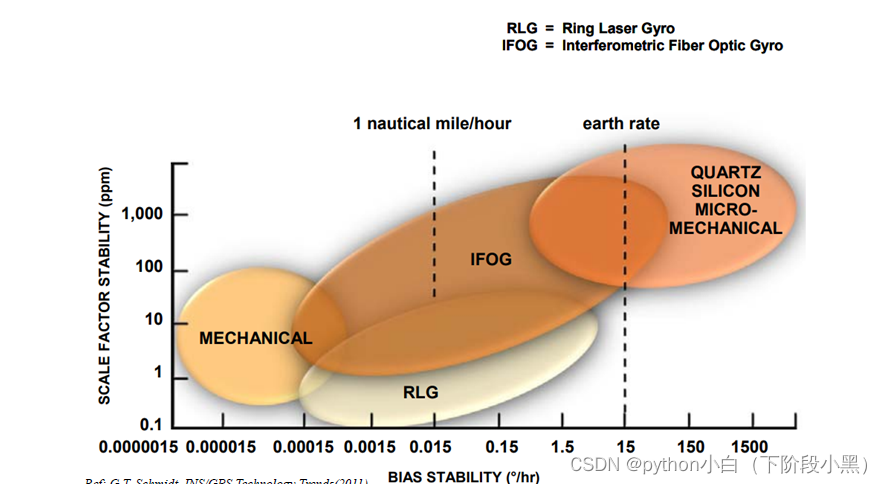
横轴表示零偏稳定性/加速度计零偏误差,越往左边精度越高,其表示静态误差,静止不动的时候就能观测出来;纵轴为比例因子=输出/输入,比例因子为动态误差,在静止不动的时候看不出来。图中红线部分指向,为精度变高的方向。
加速度计的明天—近期应用
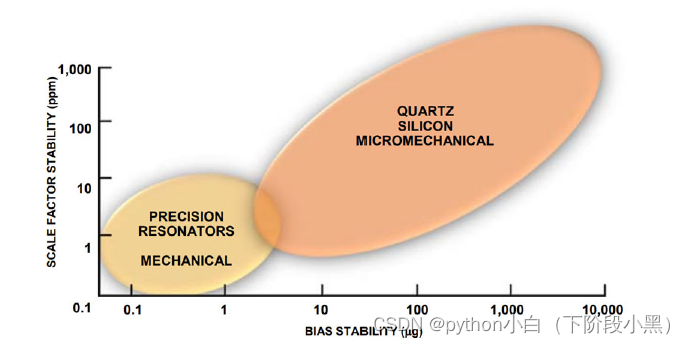
对于不远的将来,可以看到MEMS有非常广阔的舞台
加速度计的未来
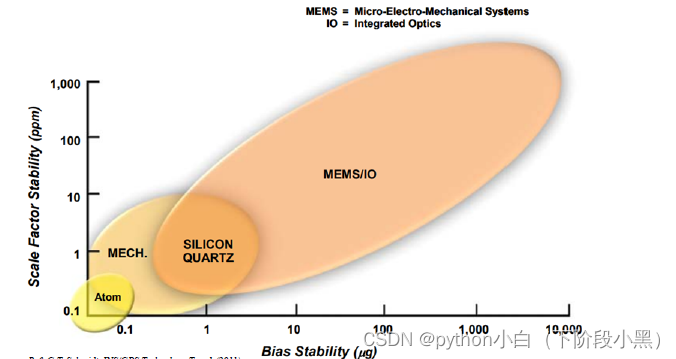
可以看到,未来的MEMS加速度计甚至可以达到战略级的1微g水平
陀螺仪的现状
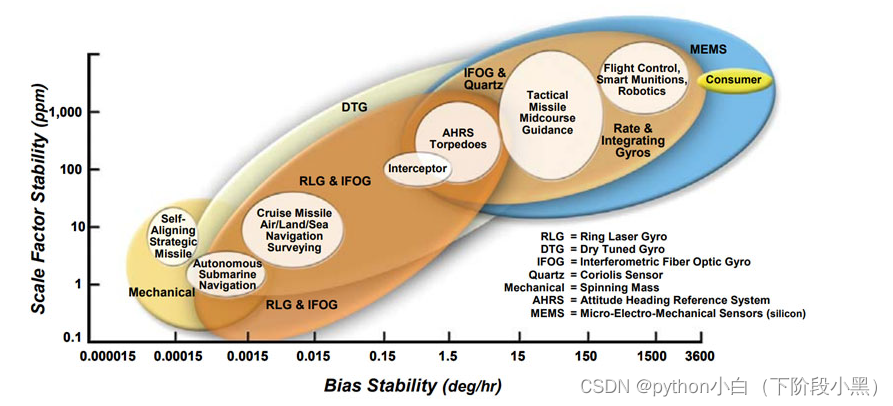
陀螺仪的明天
可以看到,中间的光纤陀螺在逐渐替代激光陀螺
陀螺仪的未来
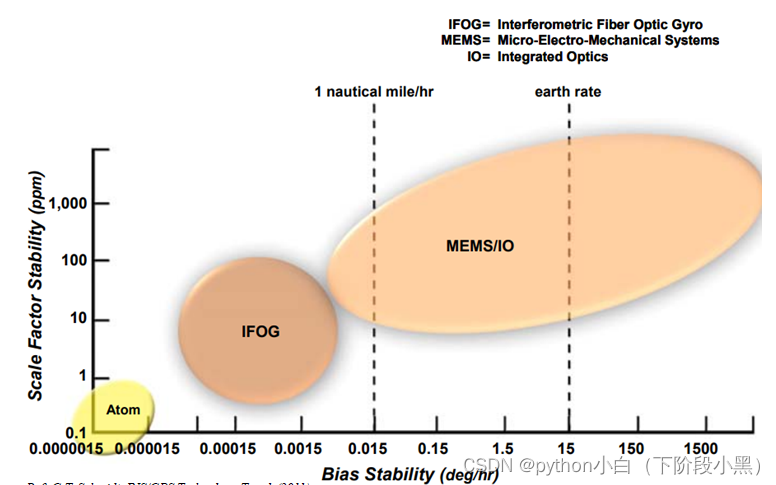
未来,光纤陀螺完全取代了激光陀螺,且MEMS在中高端都有优势
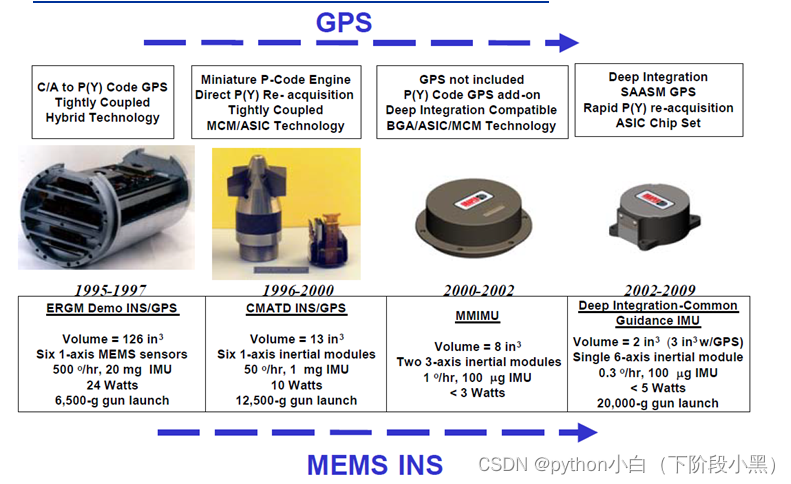
INS/GPS制导系统的发展
惯性导航技术的应用
军用和航空航天
潜艇(惯导+重力/地磁匹配)
弹道导弹(惯导+末端制导)
巡航导弹(惯导+地形匹配)
智能弹药(JDAM)
专业应用
航天
- 卫星姿态控制(陀螺定姿+ 星敏感器)
航空 - 飞机导航
- 飞机姿态控制
移动测图(MMS) - 定位定姿系统(
POS)
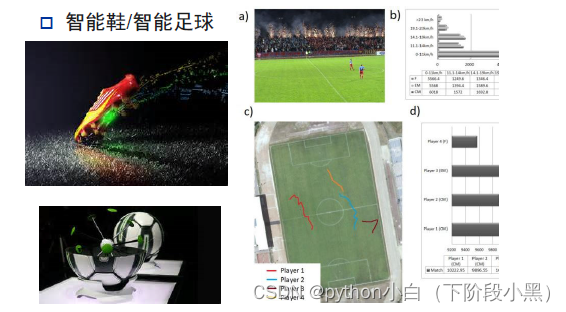
日常应用
惯性导航的发展趋势
高端:原子陀螺和加速度计
低端:MEMS惯导
组合导航:GPS,WiFi,匹配定位
相关文章
- 什么是Cookie。Cookie的原理介绍,Cookie的简单应用
- iOS应用生命周期
- 数据结构——树形结构的应用
- docker 应用篇————docker原理[三]
- Qt编写地图综合应用13-获取边界点
- ASP.NET Core应用的错误处理[1]:三种呈现错误页面的方式
- 135. SAP UI5 应用的屏幕尺寸检测工作原理深入剖析
- Angular 应用 tsconfig.json 文件里的 typeRoots 属性讲解
- SAP S/4HANA Material Fiori应用根据扩展字段搜索的实现原理
- 在Form窗体中,this的应用
- SAP UI5 应用的 OData 元数据请求响应的解析原理分析
- 如何将UI5应用部署到Fiori On-Premise和On-Cloud的Launchpad上去
- 深入理解 SAP Fiori Elements 工作原理系列之二:如何给 SAP Fiori Elements 应用添加自定义按钮
- SAP Fiori应用里的get org sales target
- 单页面 Web 应用(Single Page Application,SPA)的工作原理介绍
- 优化安卓应用内存的神奇方法以及背后的原理,一般人我不告诉他
- 【Android 安全】DEX 加密 ( Application 替换 | Android 应用启动原理 | LoadedApk 后续分析 )
- 《TPM原理及应用指南》学习 —— TPM执行环境3
- 《TPM原理及应用指南》学习 —— TPM实体7
- 《TPM原理及应用指南》学习 —— TPM实体1(1)
- Java连接Sql Server 2008的简单数据库应用
- vue卫星应用示例从0到1部署运行环境
- 回声消除的原理和应用场景