
惯性导航算法(五)-等效旋转矢量+双子样算法
等效旋转矢量
转动的不可交换性
力学中刚体的有限次转动是不可交换的。转动的不可交换性
决定了转动不是矢量,即两次以上的不同轴转动不能相加。
对一个空间方向随时间变化的角速度矢量进行积分是没有物
理意义的
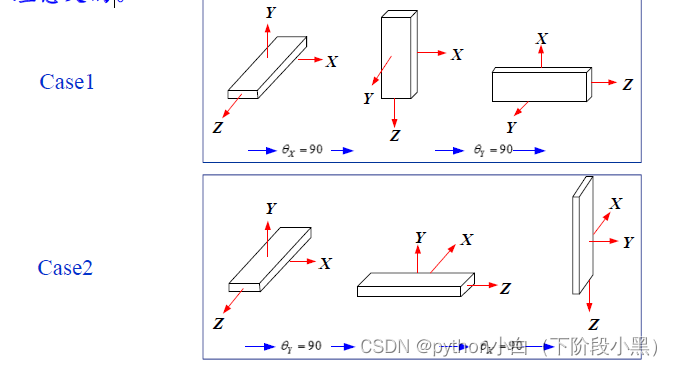
上图两个极端的例子说明,不能根据陀螺输出的角增量来判断实际的姿态变化,因为姿态变化具有不可交换性,不但要知道角增量,还要知道旋转过程是怎样的,才能确定姿态变化;也就是说角度增量不靠谱(Case1和Case2最终姿态不同,但是角增量却相等),因此就要引入等效旋转矢量,他是一个定轴旋转,Case1和Case2对应的等效旋转矢量就肯定是不同的了,也就是确定性的量
转动的不可交换性与惯性导航有何关系?
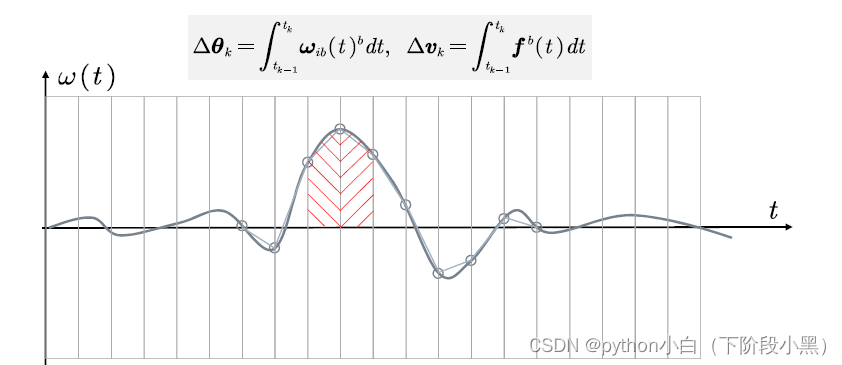
陀螺在输出角增量时只对各轴的角度变化量做了数值累加,
并未考虑角速度Wib向量在采样间隔内的方向变化,因此陀
螺角增量输出没有明确的物理含义。
等效旋转矢量
1.理论基础:一个坐标系到另一个坐标系的变换可以通过多次
转动来完成,也可以通过绕一个定义在参考坐标系中的矢量
的单次转动来实现。
2.该矢量称作等效旋转矢量(rotation vector)是一个三元素的
向量,旋转矢量的方向给出了转动轴的方向,它的模长为转
动角度的大小。又称为轴角(axis-angle)
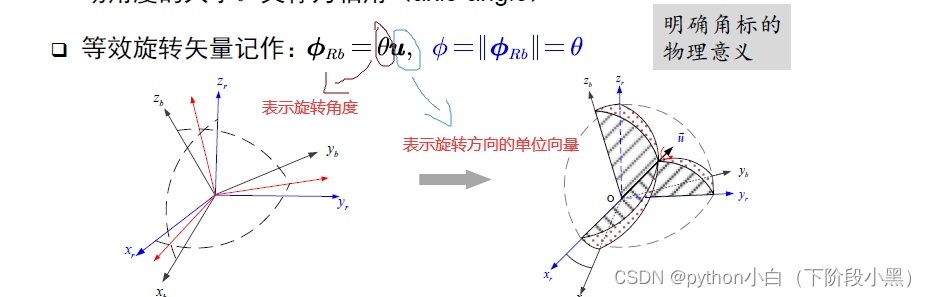
等效旋转矢量表示两个坐标系间的转动关系,可转换为对应的方向余弦矩阵和姿态四元数,完成姿态更新
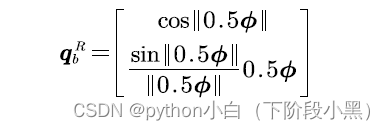
1.Rodrigues 旋转公式

2.姿态四元数的三角函数式
3.满足DCM(方向余弦矩阵)和四元数微分方程求解所要求的“定轴旋转”条件,理论上可完美补偿不可交换性误差。
注:问题的关键在于如何利用陀螺输出构造等效旋转矢量。
等效旋转矢量多子样算法的理论基础
1969年,John E. Bortz在其博士论文中详细推导了等效旋转矢量微分方程(Bortz方程),该方程是利用陀螺输出求解等效旋转矢量的基本公式,奠定了等效旋转矢量多子样算法的理论基础。
等效旋转矢量微分方程
可用几何的方法或根据四元数的微分方程来推导等效旋
转矢量的微分方程式,即Bortz 方程

1.等效旋转矢量常用于表示姿态的变化量。
2.Bortz方程等式右边两项补偿了角速度向量的方向变化
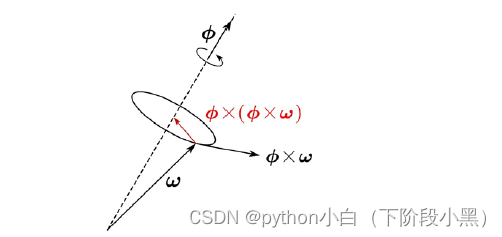
3.如果真的旋转过程是定轴旋转的话,那么角速度与旋转的角度变化肯定平行,那么叉乘为0,后两项都为0,这样Bortz方程就退化成了我们之前直观以为的,角度变化的微分就等于角速度
等效旋转矢量微分方程的工程近似
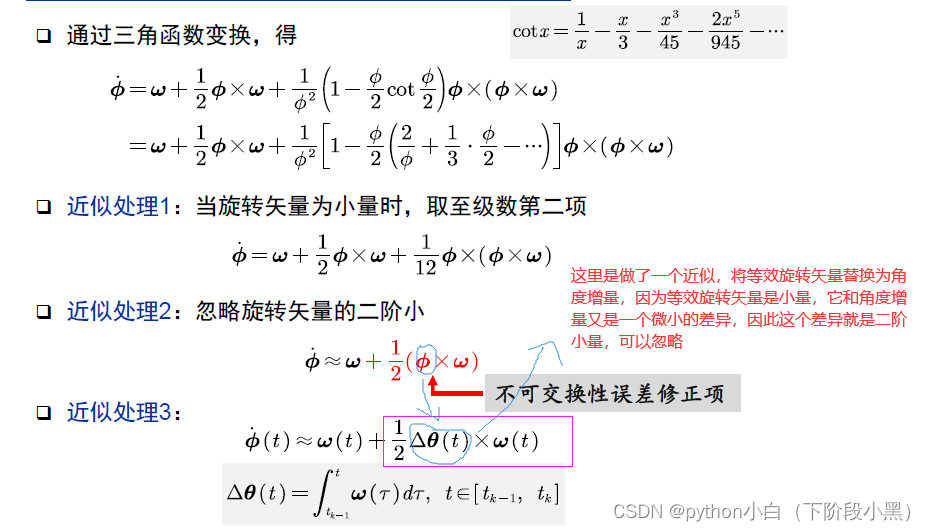
注:这里是做了—个近似,将等效旋转矢量替换为角度增量,因为等效旋转矢量是小量,它和角度增量又是—个微小的差异,因此这个差异就是二阶小量,可以忽略
等效旋转矢量的双子样算法
因为姿态更新用到了两个历元的角增量,因此叫双子样算法
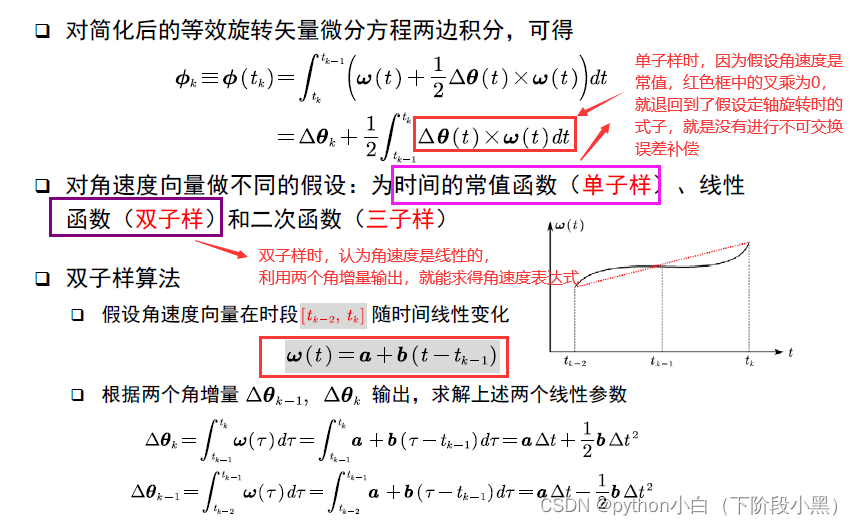
由上图可得角速度表达式(我们假设角速度变化是线性的(原来我们认为角速度方向不变),而不再是之前定轴假设的不变量),角增量表达式可由下图推导出:

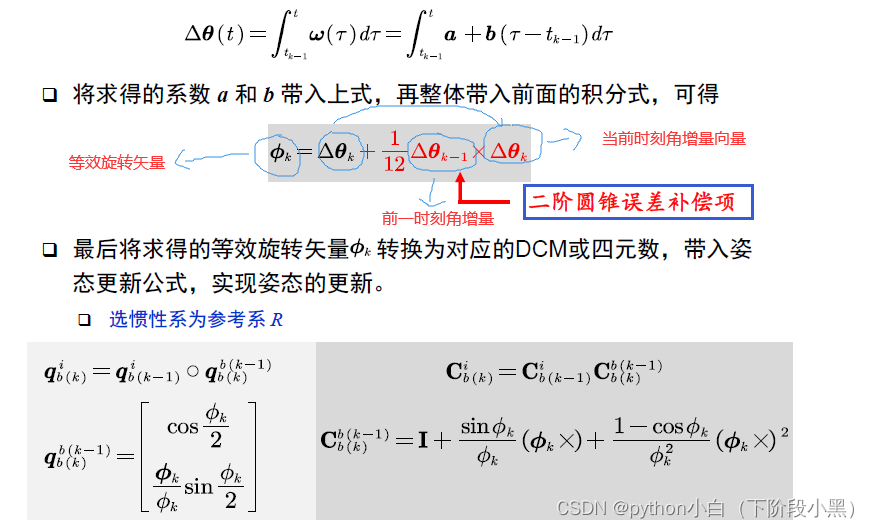
由上图可知,我们之前的定轴假设实际上就是把二阶圆锥误差补偿项给漏掉了;之所以叫二阶圆锥误差补偿,是因为当载体做圆锥运动的时候,这一项显得格外突出,因此而命名
相关文章
- 编程算法 - n个骰子的点数(递归) 代码(C)
- cocos2d-js导弹跟踪算法(一边追着目标移动一边旋转角度)
- 【MATLAB教程案例45】基于双目视觉的图像深度信息提取算法matlab仿真
- 第 19 课时:调度器的调度流程和算法介绍(木苏)
- C#,二进制数的按位旋转(Bits Rotate)算法与源代码
- C#,栅栏油漆算法(Painting Fence Algorithm)的源代码
- C#,背包问题(Knapsack Problem)贪心算法的源代码
- 【图算法】金融风控实验_997
- JS 数组中找到与目标值最接近的数字,记一次工作中关于二分查找的算法优化
- 大数据算法与分析技术国家工程实验室将建设
- 408 | 数据结构代码算法题模板技巧 之 顺序表(数组)
- 博弈算法理论学习:第1篇 了解博弈搜索以及学习过程
- Splay算法旋转操作的模拟
- 华为OD机试 - 快递货车(Python) | 机试题+算法思路+考点+代码解析 【2023】
- 传统神经网络ANN训练算法总结 参考 。 以后研究
- 游戏设计中的算法题——计算宝物升级所需的资源数
- 13数据结构与算法分析之---链式栈
- 旋转文本图片校正算法