
自动控制原理(七)
离散系统举例
- 直接数字控制系统(DDC-Direct Digital Control)
- 计算机监督控制系统(SCC—Surveillance Computer Control System)
- 集散控制系统(DCS—Distributed Control System)
采样过程的数学描述
采样过程
连续信号通过采样开关(或采样器)变换成离散信号的过程。
采样器:
完成采样功能的装置。
采样宽度
τ
\tau
τ:
开关接通很短的一段时间。
采样周期T:
相邻两次采样的时间间隔。
f
=
1
T
f={1 \over T}
f=T1及
ω
=
2
π
f
\omega=2\pi{f}
ω=2πf分别称为采样频率及采样角频率

单位脉冲串的表示:


理想采样器的输出 x*(t)可以借用单位脉冲函数来表示: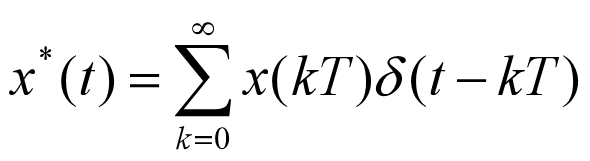
(1)用x(kT)表示x(t)在t=kT时刻的幅值;
(2)用
δ
(
t
−
k
T
)
\delta(t-kT)
δ(t−kT)表示脉冲发生的时间。
采样定理
采样信号的频率特性
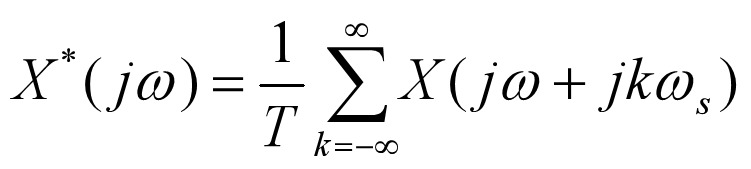

需要:滤掉高频谱线,防止谱线互相搭接。
采样定理(Shannon定理)
如果
ω
s
=
2
π
T
\omega_s={{2\pi} \over T}
ωs=T2π,若想使原始信号完满地从采样信号中恢复过来,必须使
ω
s
≥
2
ω
m
a
x
\omega_s\ge2\omega_{max}
ωs≥2ωmax,及
ω
s
2
−
ω
m
a
x
≥
0
{{\omega_s \over 2}-\omega_{max}}\ge0
2ωs−ωmax≥0
ω
s
—
—
采
样
角
频
率
\omega_s——采样角频率
ωs——采样角频率
ω
m
a
x
—
—
原
始
信
号
中
最
高
频
率
分
量
\omega_{max}——原始信号中最高频率分量
ωmax——原始信号中最高频率分量
信号恢复
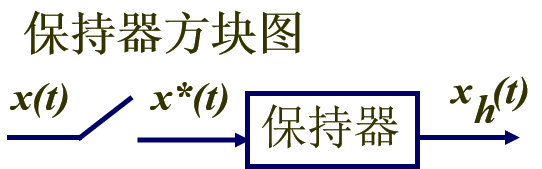
零阶保持器的时域特性



结论
- 零阶保持器的幅值随ω增大而减小,具有低通滤波特性。截止频率有无穷多个,不是理想滤波器。
- 有相位滞后,增加了系统的不稳定因素。
- 零阶保持器在ω=0时的幅值为T。
零阶保持器的作用:
(1)将离散信号变成连续信号
(2)基本滤掉高频信号,起到低通滤波器作用
(3)补偿了采样后幅值的衰减
Z变换与Z反变换
Z变换的定义

说明:
(1)将Z变换按定义式展开
X
(
z
)
=
x
(
0
)
+
x
(
T
)
z
−
1
+
x
(
2
T
)
z
−
2
+
.
.
.
X(z)=x(0)+x(T)z^{-1}+x(2T)z^{-2}+...
X(z)=x(0)+x(T)z−1+x(2T)z−2+...
(2)z变换只考虑采样瞬时的信号值
z
[
x
(
t
)
]
=
z
[
x
∗
(
t
)
]
=
X
(
z
)
z[x(t)]=z[x^*(t)]=X(z)
z[x(t)]=z[x∗(t)]=X(z)
(3)X(z)的反变换智能给出x(t)在采样瞬时的信息
若
x
1
∗
(
t
)
=
x
2
∗
(
t
)
x_1^*(t)=x_2^*(t)
x1∗(t)=x2∗(t)
则
X
1
(
z
)
=
X
2
(
z
)
X_1(z)=X_2(z)
X1(z)=X2(z)
而一般
x
1
(
t
)
≠
x
2
(
t
)
x_1(t)\ne x_2(t)
x1(t)=x2(t)
Z变换的方法
级数求和法
将Z变换公式展开,利用等比数列求和公式求解。
(1)
x
(
t
)
=
A
x(t)=A
x(t)=A

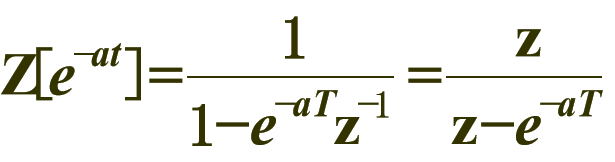
(2)
x
(
t
)
=
e
−
a
t
(
a
>
0
)
x(t)=e^{-at}(a>0)
x(t)=e−at(a>0)
(3)
x
(
t
)
=
t
x(t)=t
x(t)=t

(4)
x
(
t
)
=
s
i
n
ω
t
x(t)=sin\omega{t}
x(t)=sinωt

部分分式法

留数计算法
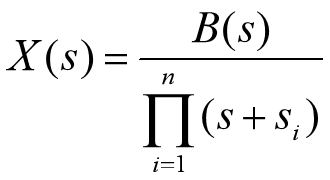
条件:
①X(s)为s的多项式之比;
②当
s
→
∞
s\to{\infin}
s→∞时,
X
(
∞
)
→
0
X(\infin)\to0
X(∞)→0;
③X(s)的极点位于s平面之左。
(1)无重根时
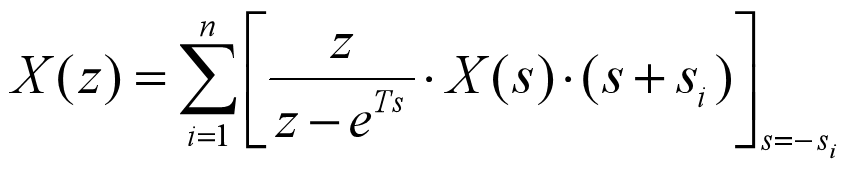
(2)有重根时

Z变换的性质
线性定理

时移定理(实数位移定理)
迟后定理

超前定理

复平移定理

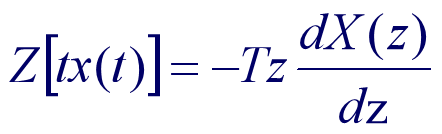
复域微分定理
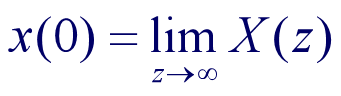
初值定理
终值定理
Z反变换
长除法
例:

部分分式法
例:

留数计算法
单极点:

重极点:

例:

采样系统的数学模型
差分方程
反映离散系统输入-输出序列之间的运算关系。
一阶惯性环节


差分方程的求解
递推法

Z变换求解差分方程
例:


脉冲传递函数(z传递函数)
一个单位脉冲加在线性环节上
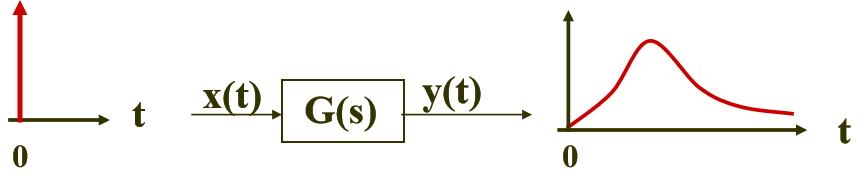

一串脉冲依次加到线性环节上

脉冲传递函数G(z):
G
(
z
)
=
Y
(
z
)
X
(
z
)
=
∑
n
=
0
∞
g
(
n
T
)
z
−
n
G(z)={Y(z) \over X(z)}=\displaystyle\sum_{n=0}^{\infin}g(nT)z^{-n}
G(z)=X(z)Y(z)=n=0∑∞g(nT)z−n
说明:
- 所求的z传递函数,是取系统输出的脉冲序列作为输出量。
- G(s)表示的是线性环节本身的传递函数,而G(z)表示的是线性环节与采样开关组合体的传递函数。
开环系统的Z传递函数
(1)串联环节之间无采样器

串联环节之间无采样开关时,总开环脉冲传函等于各环节传递函数之积的Z变换。
(2)串联环节之间有采样器

总的Z传递函数等于各串联环节Z传递函数的乘积 。
(3)带零阶保持器的开环系统脉冲传递函数
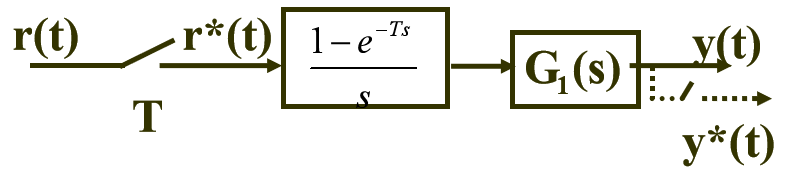

零阶保持器采样不影响系统的极点。
闭环系统Z传递函数
(1)

(2)

Z变换法的局限性
(1)Z变换的推导是建立在采样器是理想开关这个基础之上的。
(2)无论是开环或闭环离散系统,其输出大多是连续信号y(t)而不是采样信号y(kT)。而用一般的Z变换只能求出采样输出y(kT),这样就不能反映采样间隔内的y(t)值。
稳定性分析
稳定条件的对应关系

稳定性代数判据
在离散系统中,引进w变换

令W=u+jv,Z=x+jy
则:
步骤:
(1)求出开环脉冲传递函数A(z)
(2)写出闭环特征方程1+A(z)=0
(3)将
Z
=
w
+
1
w
−
1
Z={{w+1}\over{w-1}}
Z=w−1w+1代入,得到1+D(w)=0
(4)应用Routh判据(劳斯判据)
离散系统的瞬态响应
输入为单位阶跃响应时
极点位于Z平面单位圆内和圆外实轴上时

极点位于Z平面单位圆内和圆外复平面上时

闭环极点分布对瞬态响应的影响

Z平面上的根轨迹
离散系统的闭环特征方程 1+A(z)=0 ,其中A(z)为开环Z传递函数
Z平面上的根轨迹作图方法与S平面上的作图规则完全一致。
注意:
在连续系统中,稳定的边界是虚轴,而在离散系统中,稳定的边界是单位圆。
采样系统的稳态误差

z=1处有
λ
\lambda
λ重根,
λ
=
0
,
1
,
2
\lambda=0,1,2
λ=0,1,2分别表示0型,1型,2型

数字控制器设计


D(z)必须满足下列条件:
(1)D(z) 分子多项式的阶次不得大于分母多项式的阶次;
(2)D(z) 没有单位圆上(除有一个z=1的极点外)和单位圆外的极点。
最小拍系统设计
最小拍系统是在典型控制信号作用下具有非周期响应的数字控制系统,又称最少调节时间或最小拍系统、无偏差或无波纹数字控制系统,也可称为时间最佳控制系统,过渡时间短,无稳态误差,可以做到典型信号作用下无超调而且设计简单。
单位阶跃输入
方法一:

方法二:

单位斜坡函数输入

相关文章
- 区块链学习笔记:DAY01 区块链的技术原理
- 《Head First Servlet JSP》容器工作原理(如tomcat)
- struts2工作原理
- Atitit.研发团队与公司绩效管理的原理概论的attilax总结
- SAP 电商云 Spartacus UI feature level directive 的工作原理
- 深度理解Android InstantRun原理以及源码分析
- 面试题:Https通信原理及交互流程
- 云小课|MRS基础原理之ClickHouse组件介绍
- LSH算法原理
- [闪存2.1.7] NAND FLASH 多平面读(Multi Plane Read)时序及原理_闪存交错读时序(Interleave Read)
- 闪存系统性能优化方向?NAND Interleave Program(闪存交错写) 并发原理与实战?
- JAVA语言之Solr的工作原理以及如何管理索引库
- 深度解读 AlphaGo 算法原理
- Kotlin 的工作原理
- SpringMVC @RequestBody和@ResponseBody原理解析