
基于C++实现弹簧质点系统【100010397】
弹簧质点系统
Rope类构造函数的实现
对于一个有num_nodes个节点的绳子,共有num_nodes-1个弹簧部分。这些弹簧依次排列,从位置start排列到end。因此,第 i 个弹簧的起点为start + i * (end - start) / (num_nodes - 1)。一个弹簧的延伸长度和方向为(end - start) / (num_nodes - 1),记为pos。之后,依次往Rope对象的成员masses和springs中添加节点和弹簧即可。
依次创建新的质点Mass对象,其位置就是上述的弹簧起点位置。弹簧两端为新创建的质点。
Rope::Rope(Vector2D start, Vector2D end, int num_nodes, float node_mass, float k, vector<int> pinned_nodes)
{
// 一个弹簧的延伸长度和方向
Vector2D pos = (end - start) / (num_nodes - 1);
// 创建位于起点的第一个质点
masses.push_back(new Mass(start, node_mass, false));
// 依次创建之后的num_nodes个质点和弹簧,质点的pinned属性都为false
for(int i=1; i<num_nodes; i++){
// 第 i 个质点的位置为 start+i*pos
masses.push_back(new Mass(start+i*pos, node_mass, false));
// 弹簧两端为方才创建的相邻的两个质点
springs.push_back(new Spring(masses[i-1], masses[i], k));
}
// 将要求固定的质点的pinned属性记为true
for (auto &i : pinned_nodes) {
masses[i] -> pinned = true;
}
}
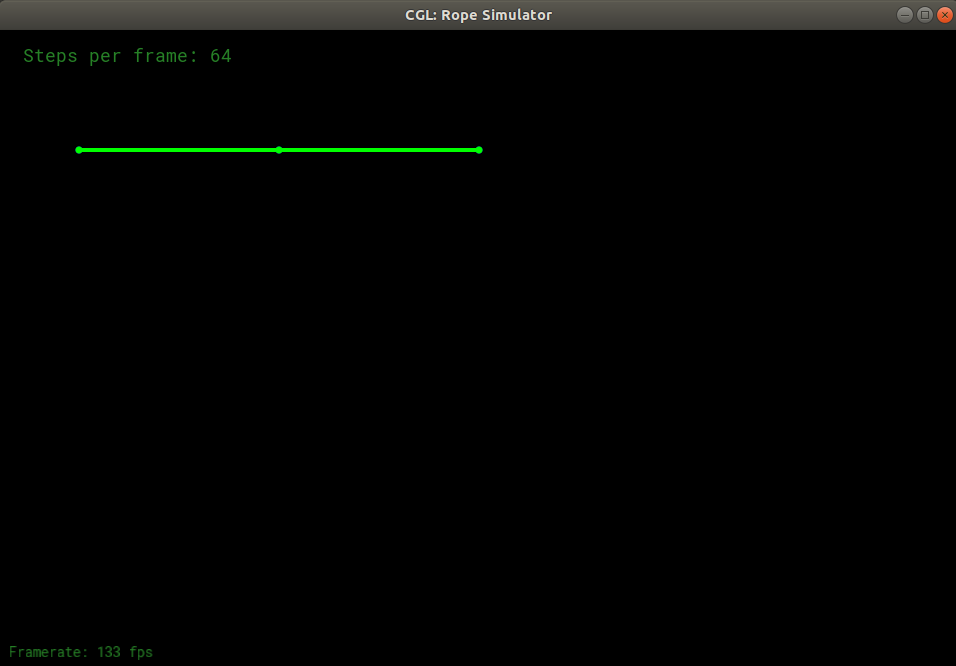
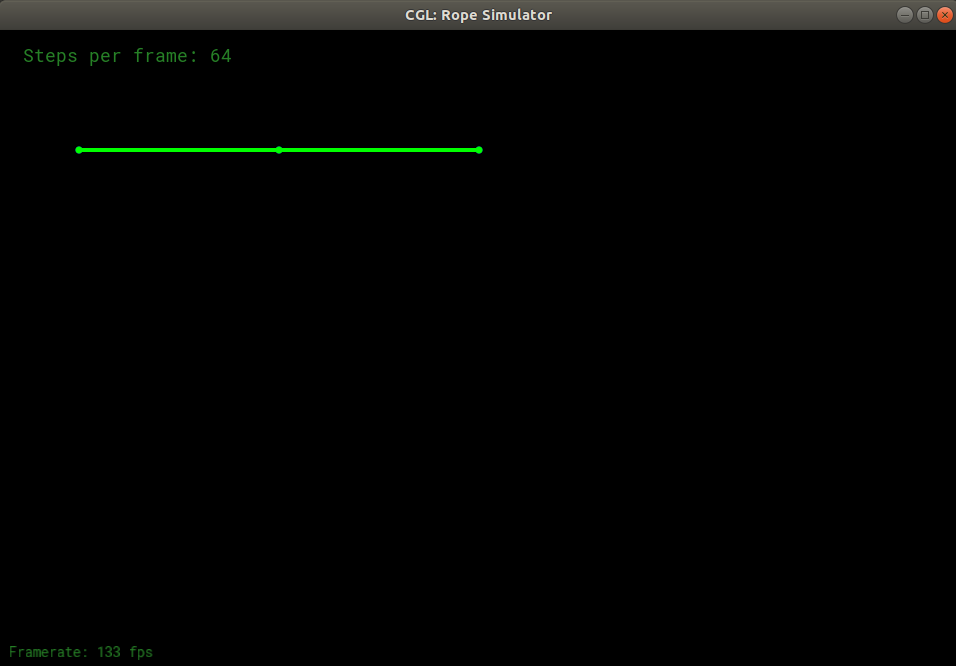
编译运行程序,得到如下结果:
Euler模拟
2.1 代码编写
首先确定每个弹簧产生的力,施加在两端的质点上。由弹簧两端的质点的位置可以得到当前弹簧的长度和朝向。将两个质点的位置相减,得到向量direct。通过调用direct.norm()可以获取其长度。依据胡克定律,有:
F
=
k
Δ
x
F=k\Delta x
F=kΔx
即弹力
F
F
F为弹性系数
k
k
k与弹簧形变长度
Δ
x
\Delta x
Δx的乘积。弹性系数已经给出,将弹簧的自然长度减去上述的弹簧的当前长度即可算出弹力大小。弹力方向和弹簧方向一致。通过调用direct.unit()将该向量单位化即可得到方向。方向的正反需要考虑弹簧的哪一端,以及弹簧是压缩还是拉长。保证最后的预期符号正确即可。
方向和弹力大小相乘就能得到弹力,加到质点合力forces上即可。
for (auto &s : springs)
{
Vector2D direct = s->m1->position - s->m2->position;
// 弹力 = 弹性系数 * (弹簧自然长度 - 弹簧当前长度)
double force = s->k * (s->rest_length - direct.norm());
// 将弹力加到两端的质点的受力上,注意方向正负
s->m1->forces += (force * direct.unit());
s->m2->forces += (-force * direct.unit());
}
计算完弹力后,需要进行重力和阻尼的运算。依次遍历各个质点,进行计算。若质点固定则不需要计算。
重力已经给出,直接加到合力m->forces上即可。物体受到的阻力与速度成正比例,比例系数即为阻尼系数,是可以调整的参数。速度选用上一时刻物体的速度即可,方向与物体运动方向相反,即速度的反方向,合力减去阻尼系数乘以速度即可。
考虑了弹力、重力、阻力后,就能得到各个质点受到的合力,除以质量就得到了加速度。通过乘以给定的时间差delta_t,加上上一时刻的速度就得到了下一时刻的速度。通过速度就能得到下一时刻的物体位置。此处可以采用显式欧拉法,移动的距离为上一时刻的速度乘以时间差,或是半隐式欧拉法,位移为下一时刻的速度乘以时间差。
最后,将所有质点的合力清零,便于下一次计算。
for (auto &m : masses)
{ // 若质点固定则不考虑
if (!m->pinned)
{ // 加上重力
m->forces += gravity;
// 加上阻力
double k_d = 0.01;
m->forces -= (k_d*m->velocity);
// 计算下一时刻的速度为位置
// m->position = m->position + m->velocity * delta_t; // 显式欧拉法
m->velocity = m->velocity + m->forces / m -> mass * delta_t;
m->position = m->position + m->velocity * delta_t; // 半隐式欧拉法
}
// Reset all forces on each mass
m->forces = Vector2D(0, 0);
}
2.2 调参与运行结果
将application.cpp中的质点数改为16:
ropeEuler = new Rope(Vector2D(0, 200), Vector2D(-400, 200), 16, config.mass,
config.ks, {0});
显式与半隐式欧拉法
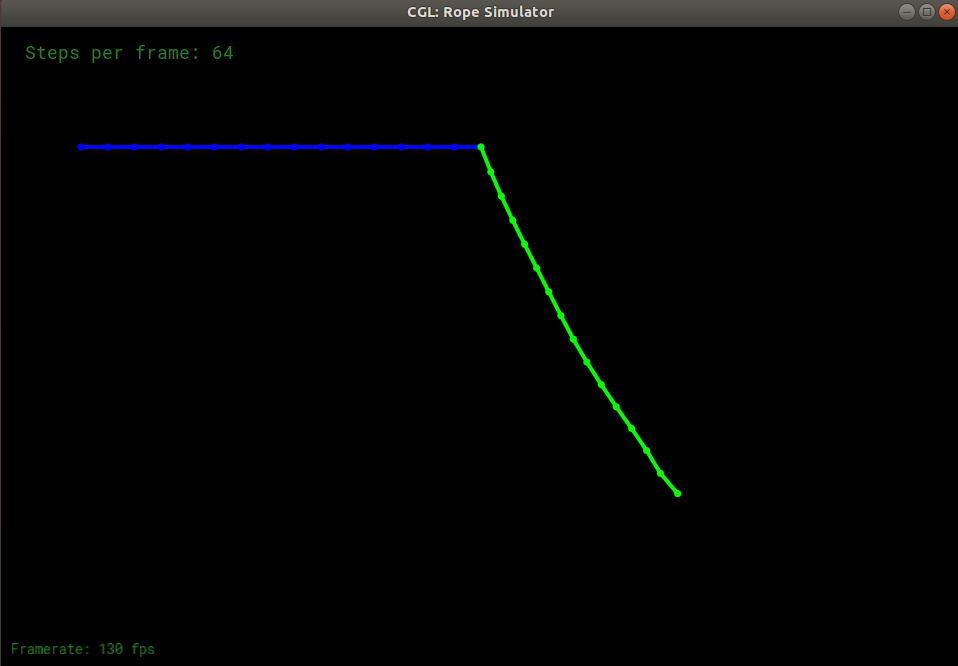
将阻尼系数设置为0.001,步数为默认值64,比较显示和半隐式欧拉法。
显示欧拉法先更新位置再更新速度:
m->position = m->position + m->velocity * delta_t; // 显式欧拉法
m->velocity = m->velocity + m->forces / m -> mass * delta_t;
半隐式欧拉法先更新速度再更新位置:
m->velocity = m->velocity + m->forces / m -> mass * delta_t;
m->position = m->position + m->velocity * delta_t; // 半隐式欧拉法
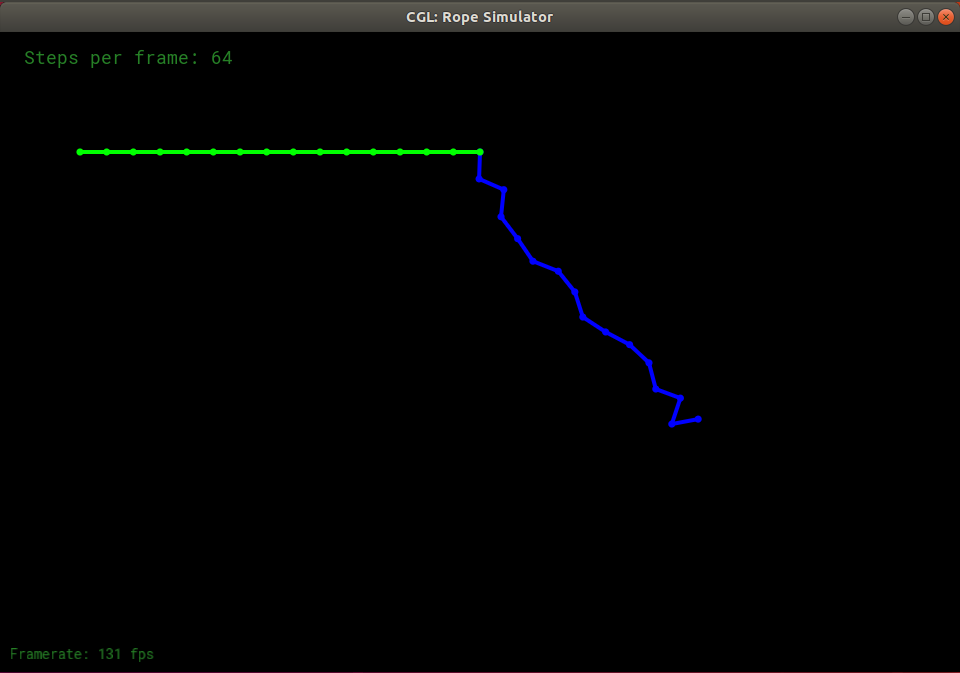
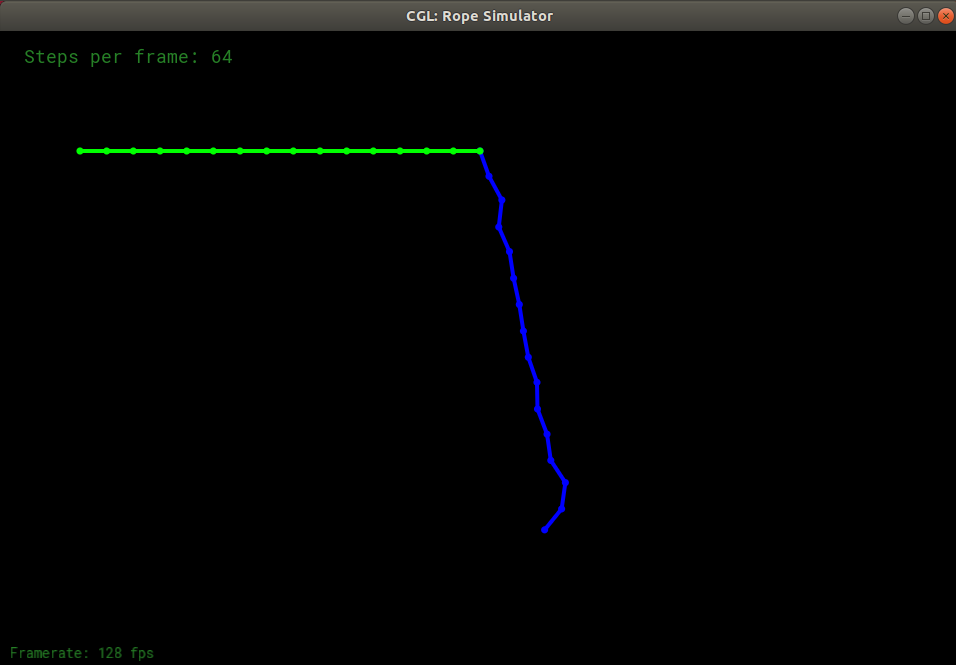
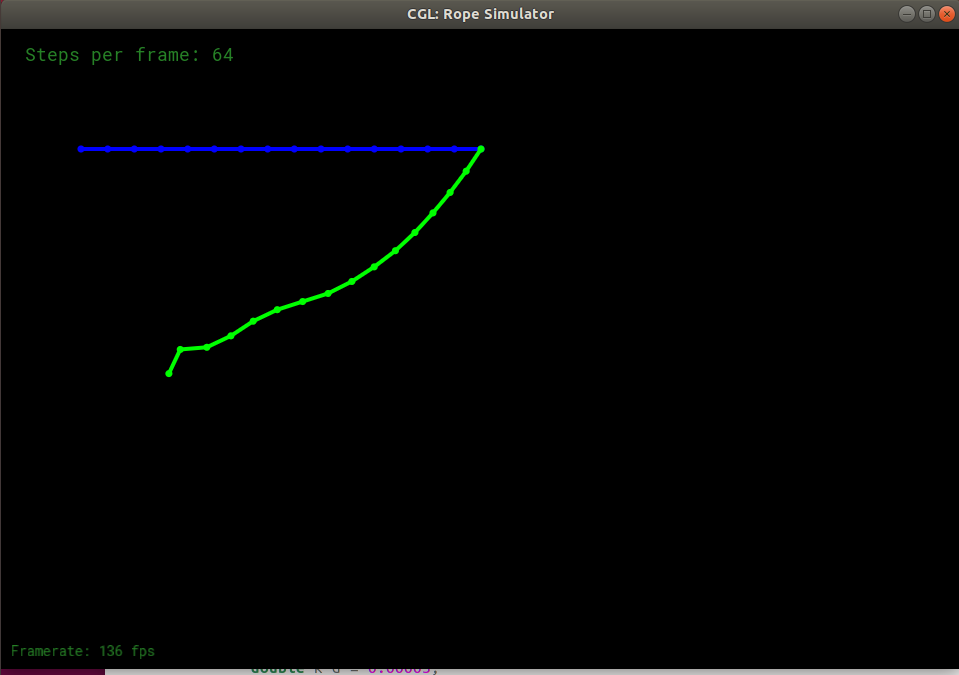
使用半隐式欧拉法,能够成功地得出模拟结果,绳子正常摆动,过了一段时间趋于竖直的稳定状态:
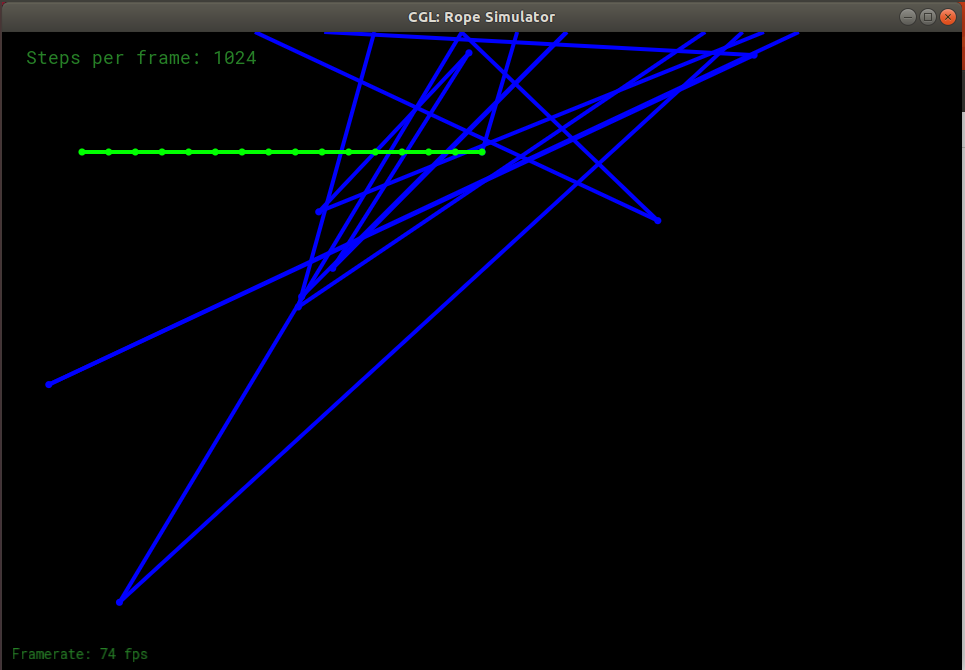
而在显示欧拉方法中,绳子鬼畜了一下,很快就消失了:
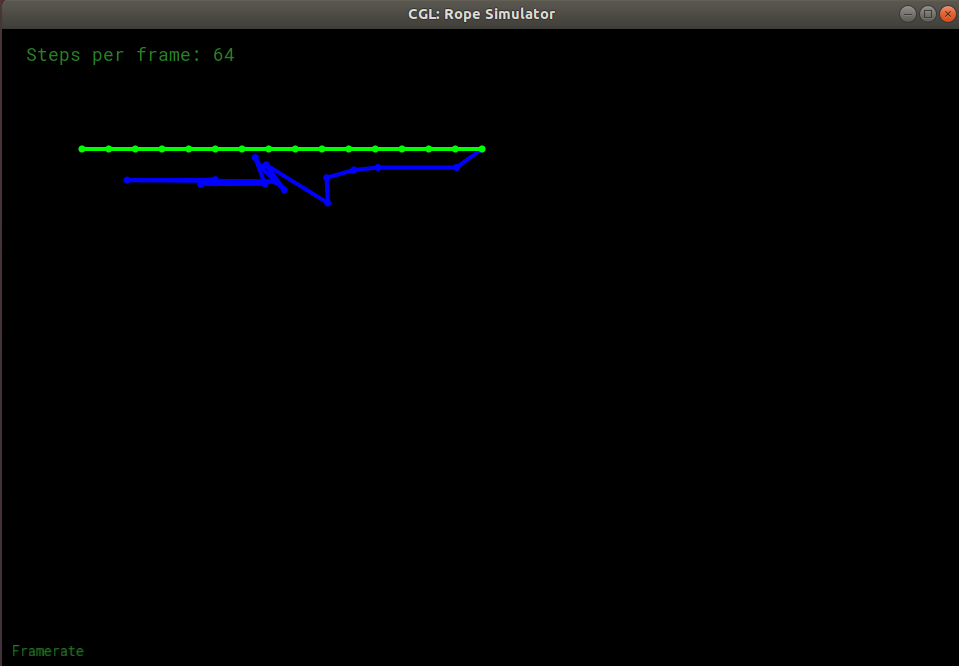
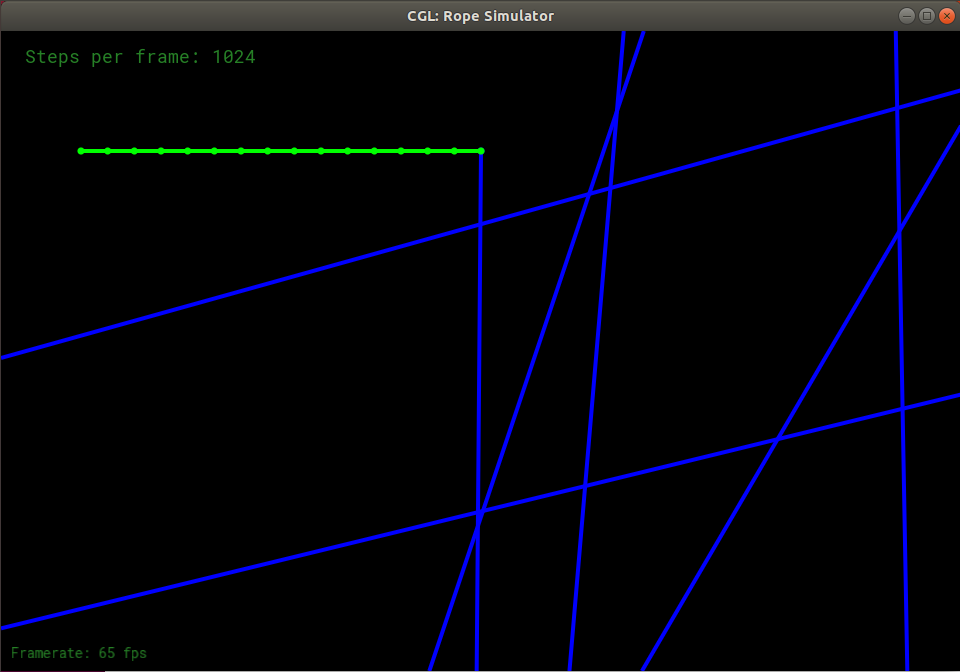
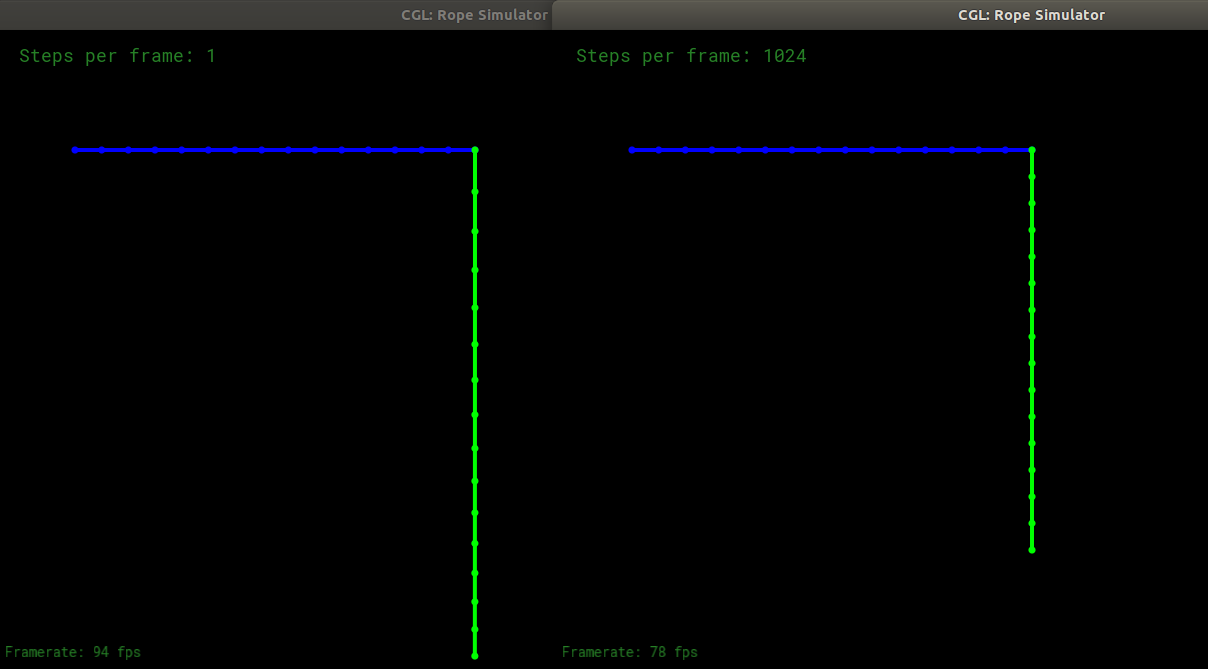
经过反复尝试,我发现当步数设置得很大时,显示欧拉法在早期能够普通地进行绳子的摆动,之后的震荡越来越不正常,直至绳子被拉的很长。将步长设置为1024时,其中的两张截图如下:
这是因为显示欧拉法不不稳定。考虑下面的一阶常微分方程:
x
˙
(
t
)
=
−
λ
x
(
t
)
x
(
0
)
=
x
^
\dot x(t) = -\lambda x(t)\\x(0) = \hat x
x˙(t)=−λx(t)x(0)=x^
其中,
x
(
t
)
x(t)
x(t)为
t
t
t 时刻的质点位置,
x
˙
(
t
)
\dot x(t)
x˙(t)为此时的速度,位置的初始值为
x
(
0
)
=
x
^
x(0)=\hat x
x(0)=x^,正数
λ
\lambda
λ为参数。将上式代入显示欧拉法公式有:
x
(
t
+
1
)
=
x
(
t
)
−
λ
x
(
t
)
∗
Δ
t
x(t+1)=x(t)-\lambda x(t)*\Delta t
x(t+1)=x(t)−λx(t)∗Δt
通过数学归纳法解得:
x
(
t
+
1
)
=
(
1
−
λ
Δ
t
)
n
+
1
x
^
x(t+1)=(1-\lambda\Delta t)^{n+1}\hat x
x(t+1)=(1−λΔt)n+1x^
这是个指数函数。当时间步长小于
2
λ
\frac2\lambda
λ2时,条件稳定,即不会发生指数爆炸。否则,系统不稳定,就会得到上述的结果,随着时间递进,参数数值变得很大,即发生了参数爆炸。在程序运行时,数值爆炸后位置参数变成了nan,不能读出确切的位置,因此打印不出绳子,看上去绳子消失了。
在我们的程序中,FPS是基本确定的,也就是说,每一帧的时间可以认为是定值。在步长较小时,每一步的时长越长,就越可能导致不稳定的结果。随着步长的逐渐增大,每一步的时间减少,则需要更多的时间系统的参数才会到达巨大的值,从而延长了数值爆炸的时间。这就是为什么步数为64时马上就会出现参数爆炸问题,而1024时会正常震荡一会儿才爆炸。理论上,只要步数够大,就能达到稳定。
步数调整
我在阻尼系数为0.001,步数为16、64、256、1024四种情况下对两种绳子进行了测试。
正如上面分析的一样,使用显示欧拉法的绳子不稳定,但随着步数的增大,绳子达到数值爆炸的时间明显增长了。而使用半隐式欧拉法的绳子在这几个绳子的参数下都能稳定,在反复摆动后停留在竖直状态。然而,半隐式方法并不是无条件稳定的。在步数降为9甚至更低时,半隐式方法的绳子也会产生参数爆炸的现象。
阻尼系数调整
设置步数为默认的64,依次将阻尼系数设置为0、0.001、0.01、0.1。考虑到显示欧拉法的绳子不稳定,下面只使用半隐式欧拉法的绳子。
在阻尼系数为 0 时,绳子不断抽动,停不下来。这是很好理解的。只考虑恒定重力和弹簧弹力的理想条件下,达到了物理的机械能守恒状态,动能、重力势能、弹性势能不断转换,导致系统不能稳定在某一恒定状态。
随着阻尼系数的增大,考虑了阻力的影响,会不断消磨机械能,导致最后整个系统稳定在绳子竖直垂下的状态。阻尼系数越大,则相同条件下的阻力越大,机械能消耗越多,因此到达最终稳定位置的时间就越快。在阻尼系数到0.1时,几乎是绳子首次下落到最低点就已经稳定。
Verlet模拟
3.1 代码编写
先在application.cpp中将绳子节点数改为16:
ropeVerlet = new Rope(Vector2D(0, 200), Vector2D(-400, 200), 16, config.mass,
config.ks, {0});
首先计算弹簧的形变长度,移动弹簧两端的质点,从而使得弹簧形变量为0。两个质点的位置相减即可得到表示弹簧的方向和长度的向量。将长度与自然长度相减得到形变长度diff_length,再将上述向量单位化得到弹簧方向。接着调整质点位置即可。需要注意的是,如果两个质点中有一个是固定的,则只能将另一个移动diff_length长度,否则两个质点都移动diff_length / 2的长度。移动方向由长度差的正负和计算的方向direct共同决定,两个质点的移动方向相反。
for (auto &s : springs)
{ // 计算弹簧形变的方向和长度
Vector2D direct = s->m1->position - s->m2->position;
double diff_length = s->rest_length - direct.norm();
direct = direct.unit();
// 若有一个质点固定,则移动另一个质点diff_length长度
if(s->m1->pinned){
s->m2->position = s->m2->position - diff_length * direct;
}
else if(s->m2->pinned){
s->m1->position = s->m1->position + diff_length * direct;
}
// 若都不固定,则两个质点各移动diff_length/2的距离
else{
s->m1->position = s->m1->position + diff_length * direct / 2;
s->m2->position = s->m2->position - diff_length * direct / 2;
}
}
接着依据Verlet的公式,利用重力更新位置。如果质点不固定,则直接将公式:
x
(
t
+
1
)
=
x
(
t
)
+
(
1
−
k
d
)
∗
(
x
(
t
)
−
x
(
t
−
1
)
)
+
a
∗
d
t
∗
d
t
x(t+1)=x(t)+(1-k_d)*(x(t)-x(t-1))+a*dt*dt
x(t+1)=x(t)+(1−kd)∗(x(t)−x(t−1))+a∗dt∗dt
代入即可。其中,
k
d
k_d
kd为阻尼系数,
a
a
a为重力加速度,可以用重力除以质点质量得到,
d
t
dt
dt为时间间隔。因为公式使用了当前位置和上一位置,每次更新位置时还需要记录上一次的位置,即更新m->last_position。
for (auto &m : masses)
{
if (!m->pinned)
{
Vector2D temp_position = m->position;
double k_d = 0.00005;
m->position = m->position + (1-k_d) * (m->position - m->last_position) + gravity / m->mass * delta_t * delta_t;
m->last_position = temp_position;
}
}
3.2 调参与运行结果
为了方便展示,我暂时将之前的欧拉绳子更新位置的语句注释掉了。
在步数为默认值64、阻尼系数为0.00005时,程序正常运行。过程中截图如下:

步数调整
我在阻尼系数为0.00005,步数为1、16、64、256、1024四种情况下对Verlet绳子进行了测试。
Verlet算法下的绳子是稳定的,在步数很低时也不会出现参数爆炸的情形。
随着步数的变大,绳子的运动变得越发平滑,同时到达稳定位置的速度越快。在步数较小,如16时,绳子会反复摆动很久才到达稳定位置,而在1024下却能很快就到达平衡位置。
在步数较低时,总体来说,绳子更像是模拟的那样,即质点与弹簧的集合。弹簧的伸长缩短的过程更加明显。随着步数的增加,绳子整体更像我们生活中所认知的绳子,长度几乎不变,像一般的绳子一样进行摆动。步数越多,则每一帧内由弹簧长度和重力影响的质点位移就越多次迭代,重力不变而弹簧形变不断被质点更新位移而归零,重力引发的形变又不足以使得绳子产生较大的弹力,达到稳定时往往会趋于原长;而步数少时,形变被质点移动消除后,重力又引发新的形变,弹簧的形变难以被完全制衡,随着帧数的增加,弹簧则会表现出更强的弹簧特性。
在步数为1(左边)和1024(右边)时的稳定状态的结果如下:
可以看出,左边的各段弹簧越靠上则下面吊的质点越多,因此就被拉得更长。直观来看,绳子整体更像是弹簧;下面的弹簧更短。而右图的各段弹簧基本都处于原长,整体更像是我们生活中所认知的绳子。
阻尼系数调整
我对阻尼系数依次为0、0.0000.5、0.0005、0.005进行了测试。
在阻尼为0时,系统仍能到达平衡位置。在步数较低时,进入平衡状态的速度更快。这说明verlet绳子系统下并不是机械能守恒的,即便没有阻力的影响,系统也不能持续运动。
而在阻尼系数增大后,绳子运动的速度放缓了。这在步数也较高的时候尤为明显,绳子就像是羽毛一样慢慢地飘了下来。因为绳子的速度的放缓,到达平衡时间可能反而变慢了,但到达平衡位置前的摆动次数变少了。这种改变在公式中是很直观的:阻尼系数影响了因重力产生的位移的大小。每一帧产生的位移减小了,看上去就是速度放缓了。
♻️ 资源
大小: 1.33MB
➡️ 资源下载:https://download.csdn.net/download/s1t16/87377754
相关文章
- 【C/C++学院】(4)c++开篇/类和对象/命名空间/类型增强/三目运算符/const专题/引用专题/函数增强
- C/C++基础讲解(六十七)之系统篇(彩色弹出菜单)
- C/C++基础讲解(六十五)之系统篇(定义文本模式)
- Open3D (C++) 基于法线的双边滤波
- [转] Matlab与C++混合编程,添加OpenCV库
- 【华为OD机试 2023最新 】 区块链文件转储系统(C++ 100%)
- 【华为OD机试 2023】完美走位(C++ Java JavaScript Python)
- Qt5.9/C++架构实例(一个简单的MCV架构应用实例)
- c++ 打印获取当前系统时间时分秒
- c++ vector 初始化_C++--vector()的用法
- C++定义自己的命名空间和头文件
- 关于C++ const 的全面总结
- Linux下用来获取各种系统信息的C++类
- 资深C++程序员学习C#要点
- 进度更新:VS2019 v16.8中对C++20模块的支持
- VC++ Windows7及以上系统中管理员权限与UAC虚拟化详解(附源码)
- VC++如何通过代码自动弹出Windows系统的一些窗口(附源码)
- C++逆向分析——继承
- 学习C++:C++基础(三)泛型编程&C++模板