
【多传感器融合】SORT算法原理
SORT算法原理(匈牙利匹配+卡尔曼滤波跟踪)
将卡尔曼滤波与匈牙利匹配算法结合起来铸就了 SORT(Simple Online and Realtime Tracking)算法,该算法能够快速的完成匹配和跟踪的目的。
如图 3-10,上下两图分别为 T1 时刻和 T2 时刻,假设 T1 时刻成功跟踪了某个单个物体,ID 为 1,绘制物体跟踪 BBox(紫色)。

T2 时刻物体检测 BBox 总共有 3 个(橙色),预测 T2 时刻物体跟踪的 BBox(紫色)有 1 个,解决紫色物体跟踪 BBox 如何与橙色物体检测 BBox 关联的算法,就是 SORT 物体跟踪算法要解决的核心问题。
SORT 关联两个 BBox 的核心算法是:用 IOU 计算 Bbox 之间的距离以及匈牙利算法选择最优关联结果。物体跟踪与物体检测是两件不同的事,物体跟踪是把物体跟踪预测的 BBox与物体检测的 BBox 关联,然后用对应的物体检测 BBox 代表成功跟踪的 BBox结果。如图 3-11 所示,从上到下分别为 T1 时刻、T2 时刻、T3 时刻:T1 时刻已经成功跟踪了 3 个检体(不同颜色的 BBox 代表不同的物体 ID),T2 时刻除了所有物体检测的新位置 BBox(橙色),还要物体跟踪预测的 Bbox(非橙的其它不同颜色 BBox)与物体检测 Bbox(橙色)关联,从而分辨出哪一个物体跟踪的 Bbox 对应哪一个物体检测的 BBox,从而产生 T2 时刻的物体跟踪 BBox结果(包括新增物体跟踪器跟踪 T2 中新检测到的物体),T3 时刻如果被追踪的物体发生了遮挡(红框 BBox 的物体),那么要继续能找到该物体并追踪(避免 ID Switch)。

SORT 算法中的代价矩阵为上一帧的 M 个目标与下一帧的 N 个目标两两目标之间的 IOU,小于阈值的匹配不成功(源码中阈值设置为 0.6)。SORT 算法流程如图 3-12 所示:

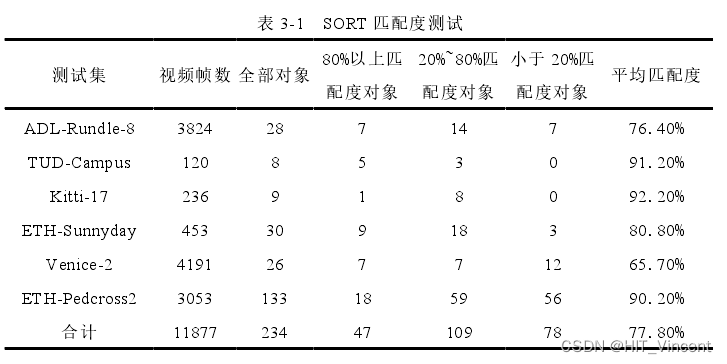
使用 2D MOT 2015 benchmark dataset[72]开源数据集对该模块进行测试,多对象匹配指标如表 3-1,对于各测试集大部分的对象匹配度都比较高,故匹配模块性能良好。
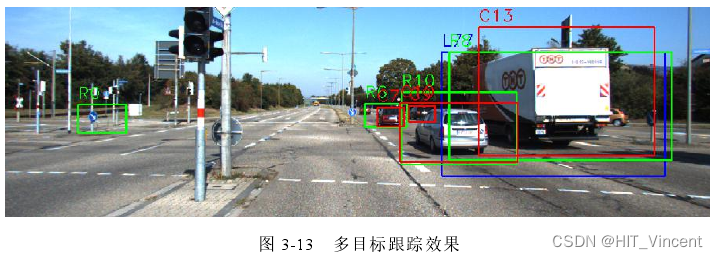
多目标状态预测估计的主要工作就是进行对多目标的运动状态的运动学估计,另外对于多传感器权重分配所需的方差信息予以提供,该部分可输出多目标预测框,实际跟踪框如图 3-13 所示,且根据卡尔曼增益评判检测框和预测框哪个更加可信,根据其卡尔曼增益输出跟踪框。
相关文章
- 限流:计数器、漏桶、令牌桶 三大算法的原理与实战(史上最全)
- 哈希算法原理【Java实现】
- 经典的7种排序算法 原理C++实现
- C语言之基本算法26—佩尔方程求解
- 双线性插值算法公式分析及FPGA实现初步构架
- 【转】差分进化算法(Differential Evolution)概述
- Google Earth Engine(GEE)——Sentinel-1 算法数据简介
- 【RFID】基于MATLAB的RFID 系统的空中接口过程以及防碰撞算法仿真
- 基于MATLAB的头脑风暴优化算法
- 先来先服务调度(FCFS)算法及优缺点
- C++程序设计:原理与实践(进阶篇)16.9 容器算法
- 每个程序员都应该收藏的算法复杂度速查表
- 排序算法--鸽巢排序(PigeonholeSort)的原理、排序思路、适用场景及代码示例
- 排序算法--堆排序(HeapSort)的原理、优点、应用及代码示例
- 雪花算法的原理和实现Java
- 概率算法
- DCT(离散余弦变换)算法原理和源码
- PyTorch-Adam优化算法原理,公式,应用
- 1004 Counting Leaves 详解 采用广度优先算法
- imu_tk标定算法
- TCP快速重传与快速恢复原理分析(四种不同的算法)
- 【转载】 优必选悉尼 AI 研究院何诗怡:基于课程学习的强化多标签图像分类算法 | 分享总结
- 机器学习-异常检测算法(一):Isolation Forest
- 算法:comparable比较器的排序原理实现(二叉树中序排序)
- 数据结构 | 十大排序超硬核八万字详解【附动图演示、算法复杂度性能分析】
- 算法练习--卡片游戏
- 【机器学习】:Kmeans均值聚类算法原理(附带Python代码实现)
- [转帖] 一些算法刷题的网站
- MySQL索引背后的数据结构及算法原理--转