
【多传感器融合】技术学习路线一篇全
2023-09-11 14:16:44 时间
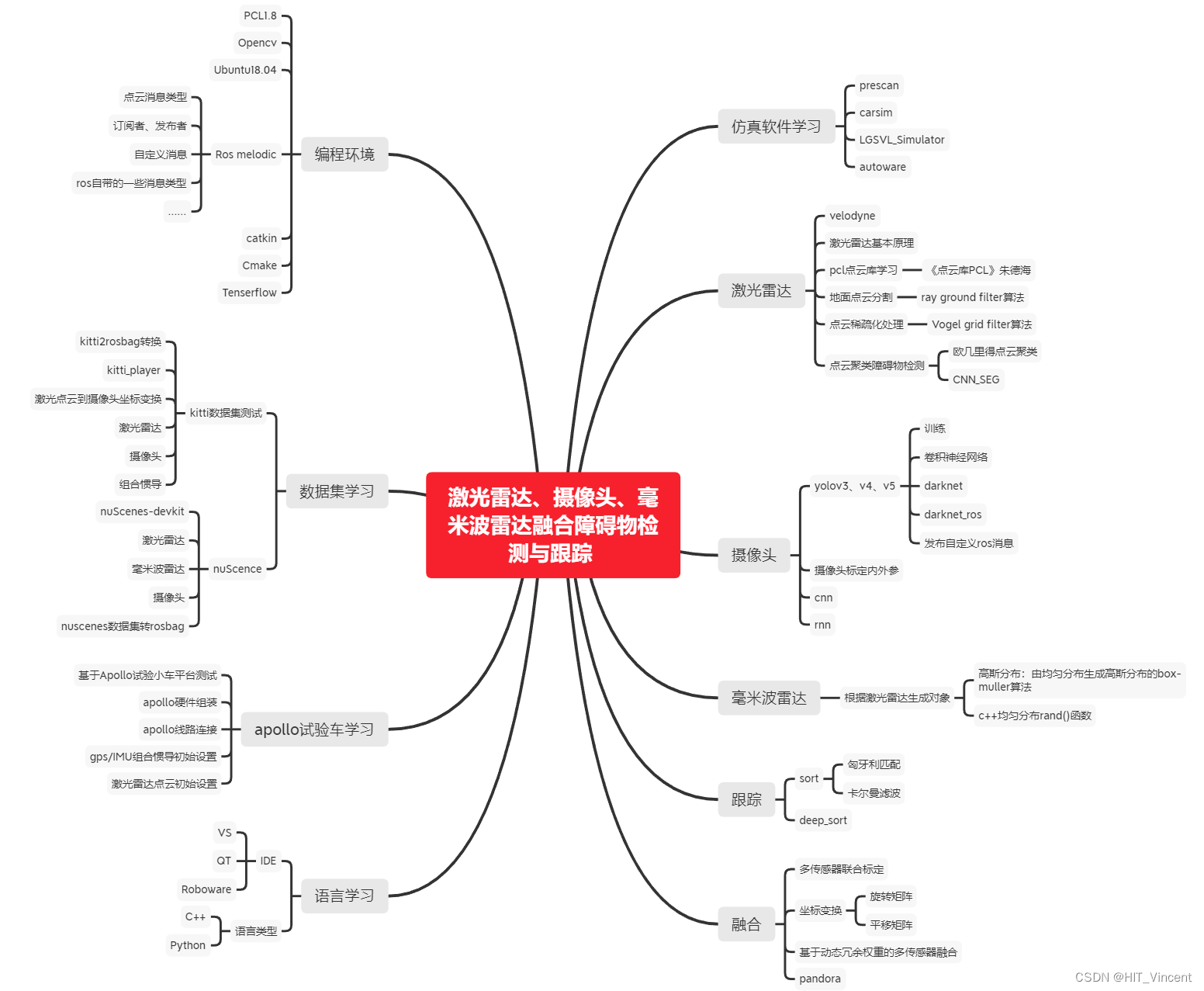
自动驾驶Lidar、Radar、Camera多传感器融合技能树、学习专栏
准备开一个专栏,专门讲解激光雷达(Lidar)、毫米波雷达(Radar)、摄像头(Camera)的融合,系统的学习从基础知识到进阶操作的每一个部分。
其中主要包括:
一、编程环境方面
1.ROS基础
2.点云库PCL基础
3.Opencv基础
4.Tenserflow基础
二、传感器方面
1.激光雷达基本原理、数据形式
2.毫米波雷达基本原理、数据形式
3.摄像头基本原理
4.激光雷达相关检测算法学习
5.毫米波雷达SDK学习
6.摄像头检测算法学习
三、匹配跟踪及融合方面
1.匈牙利匹配算法
2.卡尔曼滤波
3.SORT算法匹配跟踪
4.多传感器融合坐标变换
5.数据融合(前融合)
6.目标融合(后融合)
四、数据集及仿真软件
1.Kitti数据集
2.nuScence数据集
3.仿真平台介绍
4.仿真数据回注
下面图片是整个学习路线的技能树,后期准备以一周两更的频率根据以上技能分别进行专门讲解,包括各部分需要怎么学,以及基础知识入门,上面的各部分也会逐步做成链接的形式,方便大家学习,持续更新中。
相关文章
- 【华为云技术分享】如何快速实现鲲鹏弹性云服务器Node.js部署和高可用性?
- JavaWeb之JSP技术总结
- 达芬奇技术之Codec Engine学习(一)
- [破解] DRM-内容数据版权加密保护技术学习(上):视频文件打包实现
- mysql锁技术讨论
- 接入层技术学习
- 「RocketMQ 技术专题」帮你梳理 RocketMQ 相关的消费问题以及原理分析总结
- Atitit 2017年的技术趋势与未来的大技术趋势
- 为什么从事云原生开发需要学习容器技术
- Android Flutter学习专题,让你在未来的技术浪潮中保留优势
- ML与Regularization:正则化理论即bias-variance tradeoff(权值衰减/提前终止/数据扩增/Dropout/融合技术)在机器学习中的简介、常用方法、案例应用之详细攻略
- 基于 V2G 技术的电动汽车实时调度策略(Matlab代码实现)
- DTSE Tech Talk | 第11期:深入浅出畅谈华为云低时延直播技术
- 【华为云技术分享】华为云:安全的蘑菇街才能让你更美丽
- 【华为云技术分享】基于自动机器学习的心脏病预测模型(1)
- 【华为云技术分享】《跟唐老师学习云网络》 - 我的网络概念
- 区块链学习笔记:DAY01 区块链的技术原理
- 这个大学生开发者用技术解决收入问题,乡亲们都回村了
- 机器学习中必知必会的 8 种降维技术,最后一款超硬核!
- 【原版的】PHP技术成长规划过程中猿人
- 今年还在点点点的你!技术的迭代更新!你又如何进阶中高级自动化测试工程师?