
感知机vs支持向量机
vs 支持 向量 感知机
2023-09-11 14:16:37 时间
感知机
原理:二维空间中找到一条直线可以把所有二元类别分离开,三维或多维空间中,找到一个分离超平面把所有二元类别分离开。而可把所有二元类别分离开的超平面不止一个,哪个是最好的呢?
损失函数:所有误分类的点到超平面的总距离,找到损失函数最优化对应的超平面,即误分类的点到超平面总距离最小的模型参数w,b(感知机模型)
超平面定义
wTx+b=0 w超平面法向量,b超平面截距
感知机和SVM的区别:
感知机目标找到一个超平面将各样本尽可能分离正确(有无数个);SVM目标找到一个超平面不仅将各样本尽可能分离正确,还要使各样本离超平面距离最远(只有一个),SVM的泛化能力更强
SVM(Support Vector Machine)
1.线性可分支持向量机(Hard-Margin SVM-硬间隔最大化模型):要求所有点都正确划分的基础上,找到间隔最大的分离超平面
2.线性支持向量机(Soft-Margin SVM-软间隔最大化模型):相对与硬间隔模型放宽了限制,引入了松弛变量,使得分类器具有一定的容错性,容许有一些误分类的点
3.线性不可分支持向量机(核函数):对于线性不可分问题将样本从原始空间通过核函数映射到高维空间实行“线性可分”
感知机的目标就是找到一个分割平面,使得尽量得区分正确(如下图)
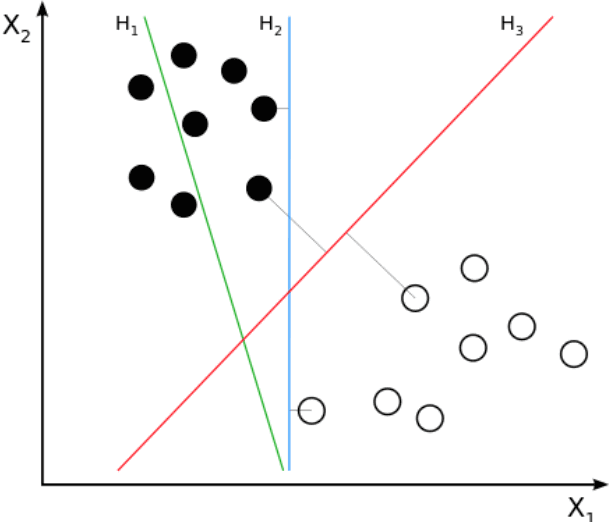
SVM的目标是找到一个分割平面,不仅区分正确,而且要让正负样本尽量远离这个分割平面。
上图里面,H2是感知机的,可以看到不唯一,H3是SVM,是唯一的。
相关文章
- 令牌桶 VS 漏桶
- Open Scene Graph:让VS支持不含后缀的头文件
- Categories VS Extensions (分类 vs 扩展)
- win10 VS code 编译运行 C/C++的方法
- VS-Visual Studio-IIS Express 支持局域网访问
- [VS 2015] VS2015 完整ISO镜像包
- Snowflake vs. Databricks谁更胜一筹?2022年最新战报
- VS调试时不加载符号
- OPEN CURSOR vs SELECT
- Atitit smp prj 项目简化方法总结 目录 第一章 俩大原则准则1 第一节 极简主义原则 + 自由主义原则1 第二章 简单化架构1 第一节 简单语言php vs java1 第二
- 使用 VS Code 远程调试 Python 程序
- Database:五大数据库类型的简介(NDBMS/HDBMS/OODBMS/RDBMS/NoSQL)、两大主流数据库对比—关系型数据库VS非关系型数据库(存储方式/存储结构/存储规范等)之详细攻略
- Windows上使用vs编译x264的方法
- 用VS ATL工程开发播放Gif图片控件的步骤
- Apache Flink vs Apache Spark——感觉二者是互相抄袭啊 看谁的好就抄过来 Flink支持在runtime中的有环数据流,这样表示机器学习算法更有效而且更有效率
- 一文吃透 VS Code+Git 操作(vs code中git的相关配置与使用)
- eFilm Workstation dicom 4.3 vs radiant dicom
- 【Web Crawler】Scrapy vs BeautifulSoup:哪个是您业务的最佳选择?
- 用VS ATL工程开发播放Gif图片控件的步骤