
嵌入式(FS_4412 IIC实验)(控制MPU6050)
2023-09-11 14:15:47 时间
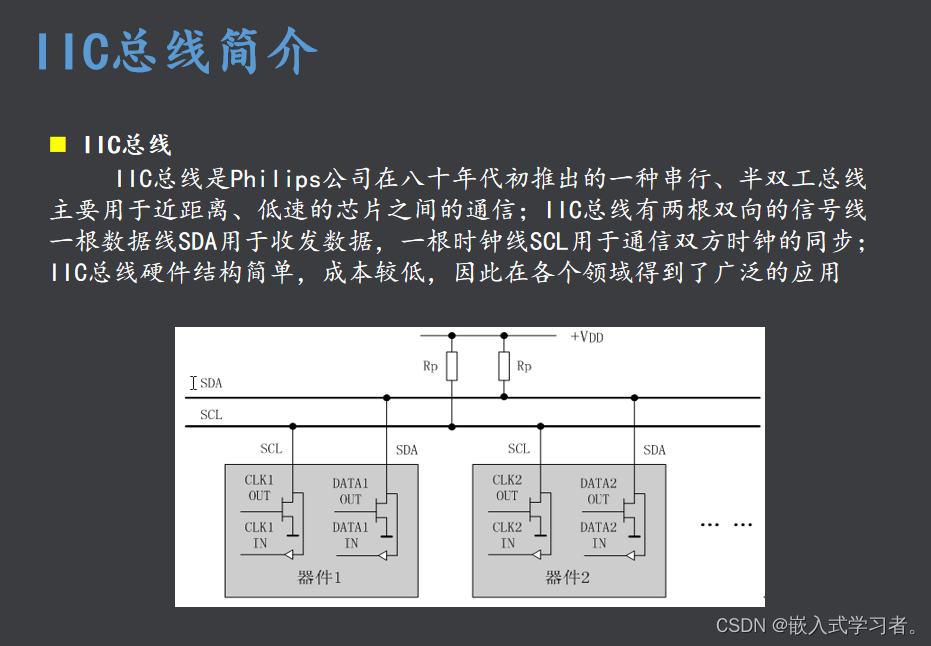
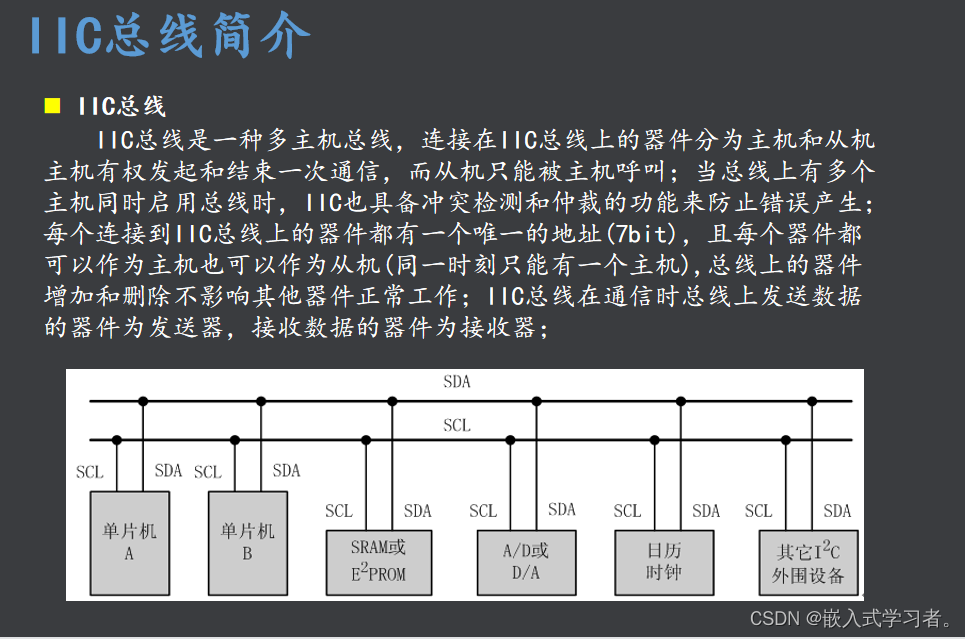
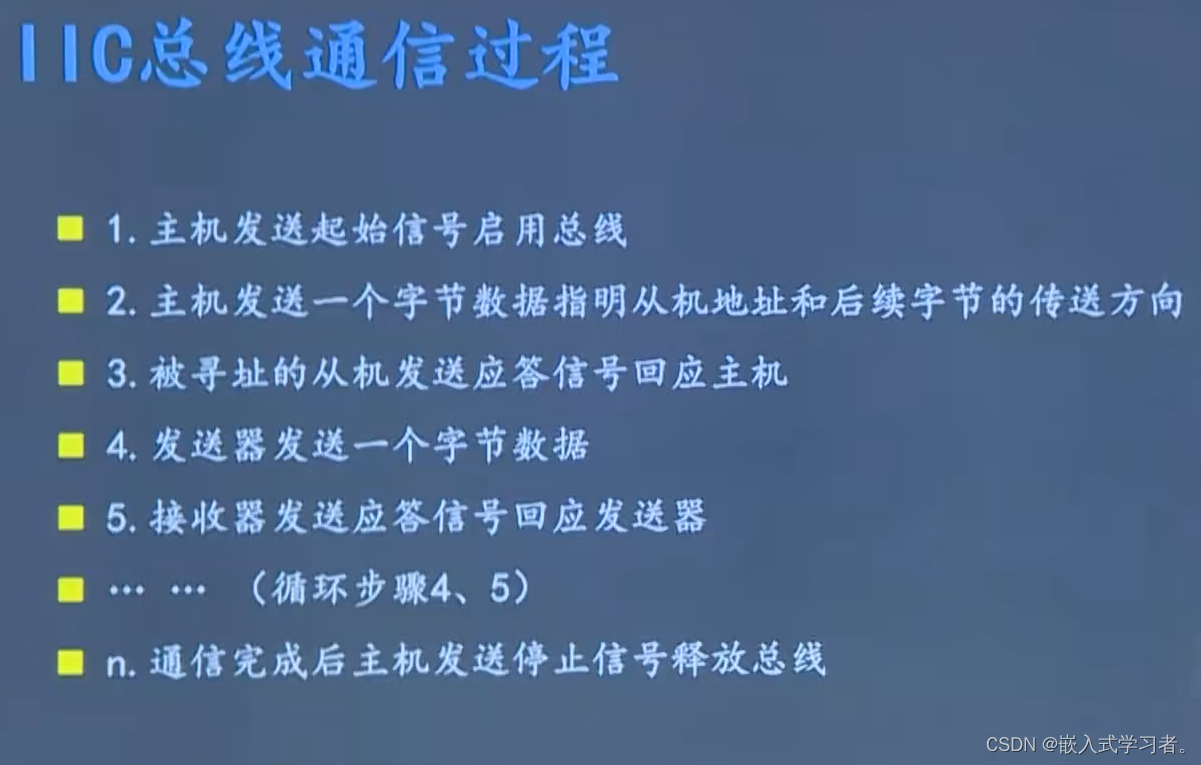
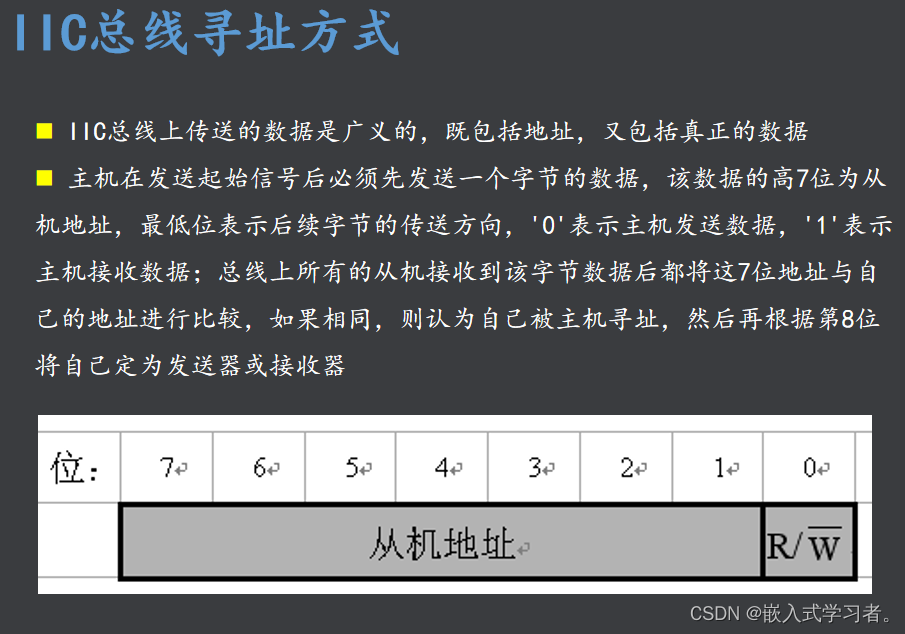
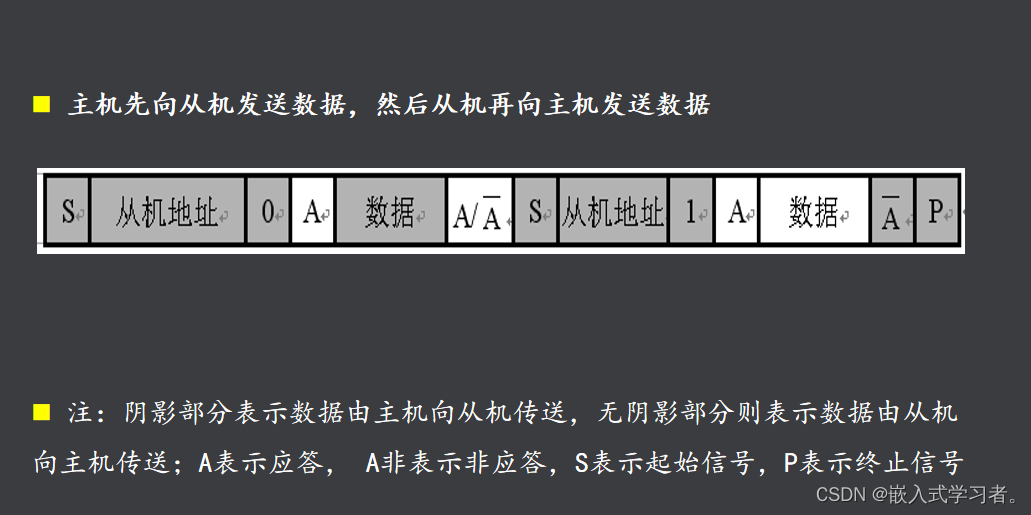
手册29章iic
MPU6050寄存器
/****************MPU6050内部常用寄存器地址****************/
#define SMPLRT_DIV 0x19 //陀螺仪采样率,典型值:0x07(125Hz)
#define CONFIG 0x1A //低通滤波频率,典型值:0x06(5Hz)
#define GYRO_CONFIG 0x1B //陀螺仪自检及测量范围,典型值:0x18(不自检,2000°/s)
#define ACCEL_CONFIG 0x1C //加速计自检及测量范围及高通滤波频率,典型值:0x0(不自检,2G,5Hz)
#define ACCEL_XOUT_H 0x3B
#define ACCEL_XOUT_L 0x3C
#define ACCEL_YOUT_H 0x3D
#define ACCEL_YOUT_L 0x3E
#define ACCEL_ZOUT_H 0x3F
#define ACCEL_ZOUT_L 0x40
#define TEMP_OUT_H 0x41
#define TEMP_OUT_L 0x42
#define GYRO_XOUT_H 0x43
#define GYRO_XOUT_L 0x44
#define GYRO_YOUT_H 0x45
#define GYRO_YOUT_L 0x46
#define GYRO_ZOUT_H 0x47
#define GYRO_ZOUT_L 0x48
#define PWR_MGMT_1 0x6B //电源管理,典型值:0x00(正常启用)
#define SlaveAddress 0x68 //MPU6050-I2C地址
#include "exynos_4412.h"
/****************MPU6050内部寄存器地址****************/
#define SMPLRT_DIV 0x19 //陀螺仪采样率,典型值:0x07(125Hz)
#define CONFIG 0x1A //低通滤波频率,典型值:0x06(5Hz)
#define GYRO_CONFIG 0x1B //陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s)
#define ACCEL_CONFIG 0x1C //加速计自检、测量范围及高通滤波频率,典型值:0x18(不自检,2G,5Hz)
#define ACCEL_XOUT_H 0x3B
#define ACCEL_XOUT_L 0x3C
#define ACCEL_YOUT_H 0x3D
#define ACCEL_YOUT_L 0x3E
#define ACCEL_ZOUT_H 0x3F
#define ACCEL_ZOUT_L 0x40
#define TEMP_OUT_H 0x41
#define TEMP_OUT_L 0x42
#define GYRO_XOUT_H 0x43
#define GYRO_XOUT_L 0x44
#define GYRO_YOUT_H 0x45
#define GYRO_YOUT_L 0x46
#define GYRO_ZOUT_H 0x47
#define GYRO_ZOUT_L 0x48
#define PWR_MGMT_1 0x6B //电源管理,典型值:0x00(正常启用)
#define WHO_AM_I 0x75 //IIC地址寄存器(默认数值0x68,只读)
#define SlaveAddress 0x68 //MPU6050-I2C地址
/************************延时函数************************/
void mydelay_ms(int time)
{
int i,j;
while(time--)
{
for(i=0;i<5;i++)
for(j=0;j<514;j++);
}
}
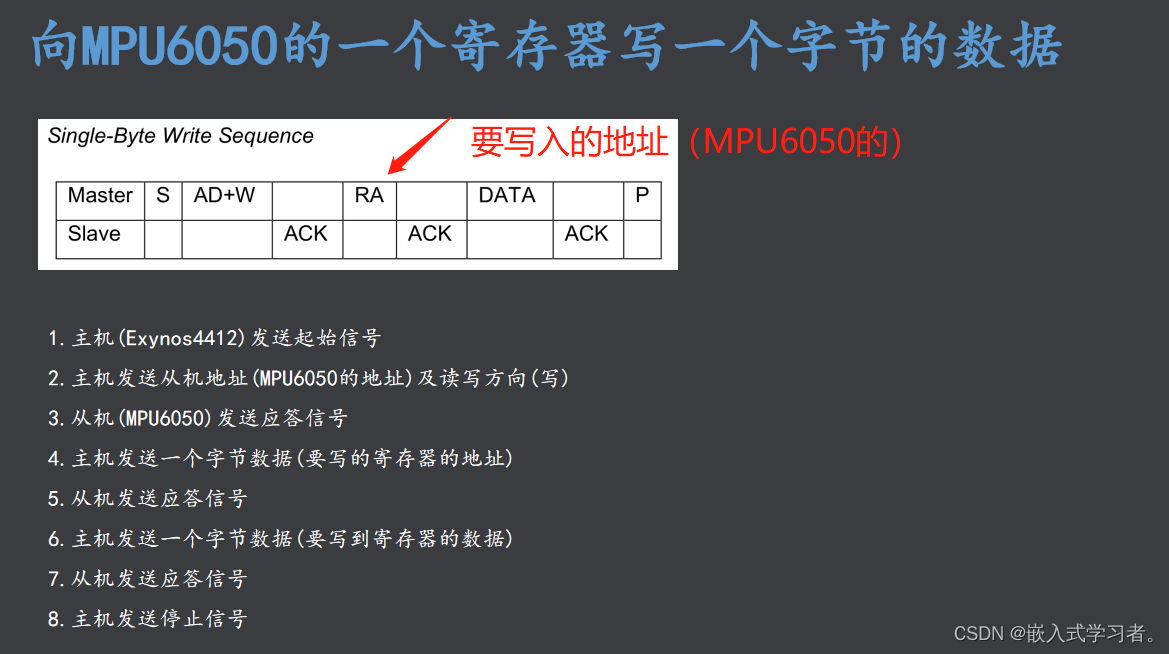
/**********************************************************************
* 函数功能:I2C向特定地址写一个字节
* 输入参数:
* slave_addr: I2C从机地址
* addr: 芯片内部特定地址
* data:写入的数据
**********************************************************************/
void iic_write (unsigned char slave_addr, unsigned char addr, unsigned char data)
{
/*对时钟源进行512倍预分频 打开IIC中断(每次完成一个字节的收发后中断标志位会自动置位)*/
I2C5.I2CCON = I2C5.I2CCON | (1<<6) | (1<<5);
/*设置IIC模式为主机发送模式 使能IIC发送和接收*/
I2C5.I2CSTAT = 0xd0;
/*将第一个字节的数据写入发送寄存器 即从机地址和读写位(MPU6050-I2C地址+写位0)*/
I2C5.I2CDS = slave_addr<<1;
/*设置IIC模式为主机发送模式 发送起始信号启用总线 使能IIC发送和接收*/
I2C5.I2CSTAT = 0xf0;
/*等待从机接受完一个字节后产生应答信号(应答后中断挂起位自动置位)*/
while(!(I2C5.I2CCON & (1<<4)));
/*将要发送的第二个字节数据(即MPU6050内部寄存器的地址)写入发送寄存器*/
I2C5.I2CDS = addr;
/*清除中断挂起标志位 开始下一个字节的发送*/
I2C5.I2CCON = I2C5.I2CCON & (~(1<<4));
/*等待从机接受完一个字节后产生应答信号(应答后中断挂起位自动置位)*/
while(!(I2C5.I2CCON & (1<<4)));
/*将要发送的第三个字节数据(即要写入到MPU6050内部指定的寄存器中的数据)写入发送寄存器*/
I2C5.I2CDS = data;
/*清除中断挂起标志位 开始下一个字节的发送*/
I2C5.I2CCON = I2C5.I2CCON & (~(1<<4));
/*等待从机接受完一个字节后产生应答信号(应答后中断挂起位自动置位)*/
while(!(I2C5.I2CCON & (1<<4)));
/*发送停止信号 结束本次通信*/
I2C5.I2CSTAT = 0xD0;
/*清除中断挂起标志位*/
I2C5.I2CCON = I2C5.I2CCON & (~(1<<4));
/*延时*/
mydelay_ms(10);
}
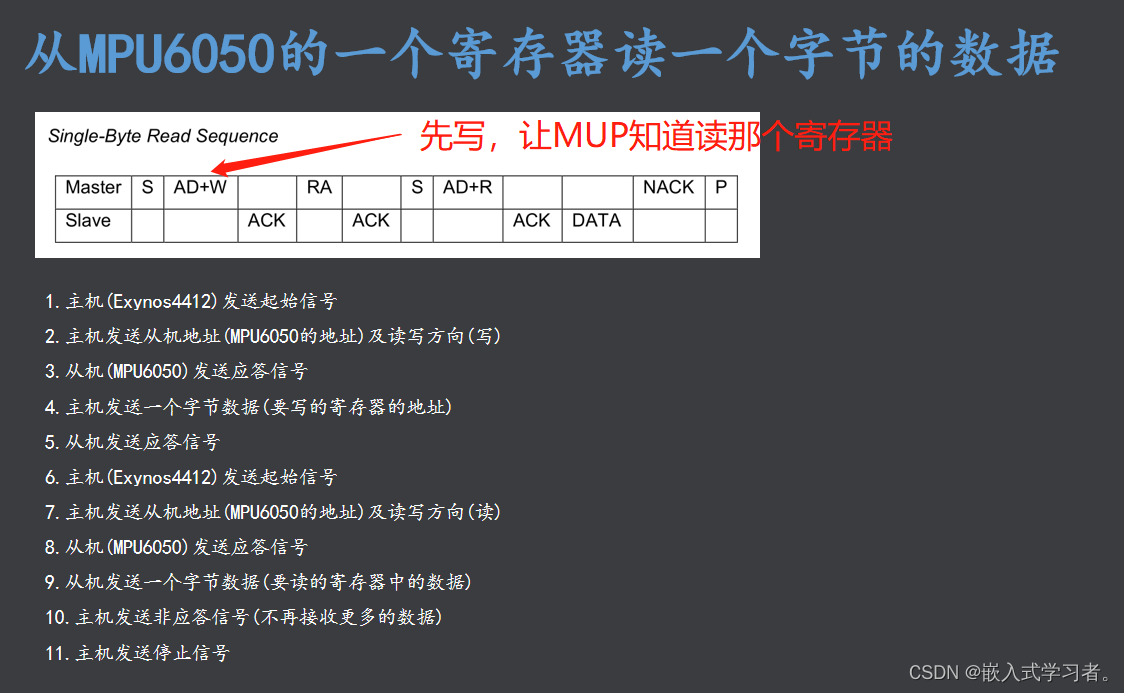
/**********************************************************************
* 函数功能:I2C从特定地址读取1个字节的数据
* 输入参数: slave_addr: I2C从机地址
* addr: 芯片内部特定地址
* 返回参数: unsigned char: 读取的数值
**********************************************************************/
unsigned char iic_read(unsigned char slave_addr, unsigned char addr)
{
unsigned char data = 0;
/*对时钟源进行512倍预分频 打开IIC中断(每次完成一个字节的收发后中断标志位会自动置位)*/
I2C5.I2CCON = I2C5.I2CCON | (1<<6) | (1<<5);
/*设置IIC模式为主机发送模式 使能IIC发送和接收*/
I2C5.I2CSTAT = 0xd0;
/*将第一个字节的数据写入发送寄存器 即从机地址和读写位(MPU6050-I2C地址+写位0)*/
I2C5.I2CDS = slave_addr<<1;
/*设置IIC模式为主机发送模式 发送起始信号启用总线 使能IIC发送和接收*/
I2C5.I2CSTAT = 0xf0;
/*等待从机接受完一个字节后产生应答信号(应答后中断挂起位自动置位)*/
while(!(I2C5.I2CCON & (1<<4)));
/*将要发送的第二个字节数据(即要读取的MPU6050内部寄存器的地址)写入发送寄存器*/
I2C5.I2CDS = addr;
/*清除中断挂起标志位 开始下一个字节的发送*/
I2C5.I2CCON = I2C5.I2CCON & (~(1<<4));
/*等待从机接受完一个字节后产生应答信号(应答后中断挂起位自动置位)*/
while(!(I2C5.I2CCON & (1<<4)));
/*清除中断挂起标志位 重新开始一次通信 改变数据传送方向*/
I2C5.I2CCON = I2C5.I2CCON & (~(1<<4));
/*将第一个字节的数据写入发送寄存器 即从机地址和读写位(MPU6050-I2C地址+读位1)*/
I2C5.I2CDS = slave_addr << 1 | 0x01;
/*设置IIC为主机接收模式 发送起始信号 使能IIC收发*/
I2C5.I2CSTAT = 0xb0;
/*等待从机接收到数据后应答*/
while(!(I2C5.I2CCON & (1<<4)));
/*禁止主机应答信号(即开启非应答 因为只接收一个字节) 清除中断标志位*/
I2C5.I2CCON = I2C5.I2CCON & (~(1<<7))&(~(1<<4));
/*等待接收从机发来的数据*/
while(!(I2C5.I2CCON & (1<<4)));
/*将从机发来的数据读取*/
data = I2C5.I2CDS;
/*直接发起停止信号结束本次通信*/
I2C5.I2CSTAT = 0x90;
/*清除中断挂起标志位*/
I2C5.I2CCON = I2C5.I2CCON & (~(1<<4));
/*延时等待停止信号稳定*/
mydelay_ms(10);
return data;
}
/**********************************************************************
* 函数功能:MPU6050初始化
**********************************************************************/
void MPU6050_Init ()
{
iic_write(SlaveAddress, PWR_MGMT_1, 0x00); //设置使用内部时钟8M
iic_write(SlaveAddress, SMPLRT_DIV, 0x07); //设置陀螺仪采样率
iic_write(SlaveAddress, CONFIG, 0x06); //设置数字低通滤波器
iic_write(SlaveAddress, GYRO_CONFIG, 0x18); //设置陀螺仪量程+-2000度/s
iic_write(SlaveAddress, ACCEL_CONFIG, 0x0); //设置加速度量程+-2g
}
/**********************************************************************
* 函数功能:主函数
**********************************************************************/
int main(void)
{
unsigned char zvalue_h,zvalue_l; //存储读取结果
short int zvalue;
/*设置GPB_2引脚和GPB_3引脚功能为I2C传输引脚*/
GPB.CON = (GPB.CON & ~(0xF<<12)) | 0x3<<12; //设置GPB_3引脚功能为I2C_5_SCL
GPB.CON = (GPB.CON & ~(0xF<<8)) | 0x3<<8; //设置GPB_2引脚功能为I2C_5_SDA
uart_init(); //初始化串口
MPU6050_Init(); //初始化MPU6050
printf("\n********** I2C test!! ***********\n");
while(1)
{
zvalue_h = iic_read(SlaveAddress, GYRO_ZOUT_H); //获取MPU6050-Z轴角速度高字节
zvalue_l = iic_read(SlaveAddress, GYRO_ZOUT_L); //获取MPU6050-Z轴角速度低字节
zvalue = (zvalue_h<<8)|zvalue_l; //获取MPU6050-Z轴角速度
printf(" GYRO--Z :Hex: %d \n", zvalue); //打印MPU6050-Z轴角速度
mydelay_ms(100);
}
return 0;
}
相关文章
- 并发工具类(三)控制并发线程数的Semaphore
- IoC模式(依赖、依赖倒置、依赖注入、控制反转)
- MySQL数据库学习笔记(四)----MySQL聚合函数、控制流程函数(含navicat软件的介绍)
- 如何使用 Istio 进行多集群部署管理:多控制平面
- 多个SDK控制管理
- Android fragment控制activity中的控件
- 【Android笔记70】Android之相机控制类Camera2相关操作的API介绍(Camera2)
- 共享内存 共享内存的特点 共享内存示意图 获得一个共享存储标识符 共享内存映射(attach) 共享内存控制 解除共享内存映射(detach)
- 8 cocos2dx加入场景切换效果,控制场景切换彻底完毕之后再运行动画
- 深入浅出matplotlib(87):误差条的数量控制
- 谈谈分布式事务之一:SOA需要怎样的事务控制方式
- VB.net:VB.net编程语言学习之操作符(变量/常量/数据类型/声明)&逻辑控制语句(条件判断/循环语句)的简介、案例应用之详细攻略
- 【java基础】循环语句、中断控制语句
- Python的学习心得和知识总结(四)|Python控制语句(选择结构、循环结构)