
基于滑模变结构的倒立摆控制系统matlab仿真
MATLAB 基于 结构 仿真 控制系统
2023-09-11 14:15:32 时间
目录
一、理论基础
随着关于倒立摆控制系统研究的不断推进,倒立摆在设计结构上有很多种类,其中最常见的有直线型倒立摆和环形倒立摆(如图1.1所示),从倒立摆的阶数方面看,可以分为3阶倒立摆,4阶倒立摆甚至更高阶倒立摆等。倒立摆在使用过程中,往往通过一个小车在水平方向上来回行驶,使得小车上方的倒立摆达到一个稳定的状态。而在为了达到这个动态平衡状态,研究者需要尝试不同的控制技术使得倒立摆达到一个严格的稳定状态。
倒立摆在实际作业过程中,其动态平衡往往是一个非线性的变化过程,因为采用传统的控制方式将无法满足倒立摆达到动态平衡的需求。针对这个问题,有学者提出了一种基于滑膜变结构的控制算法。滑膜变结构控制系统是一种非线性的控制方法,其对于控制对象的系统参数以及外部的干扰影响因素具有较强的不变性,即无论设置不同控制系统参数还是设置不同环境干扰因素,其均可保证控制过程的稳定性。
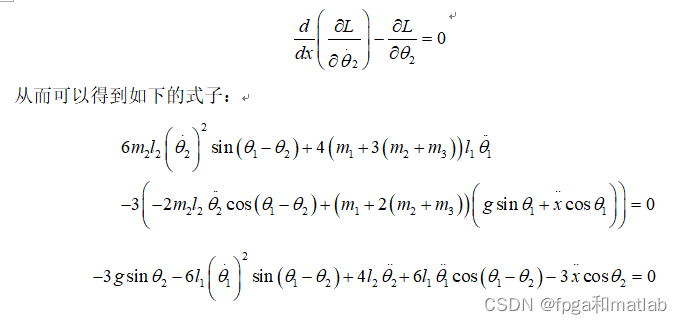
倒立摆控制系统总体的动能和势能分别可以表示为:


二、核心程序
...............................................
LEN= 10000;
%离散
ts = 0.01;
g=9.81;
m1=0.04;
m2=0.132;
m3=0.208;
l1=0.09;
l2=0.27;
K12 = 3*(-2*g*m1-4*g*m2-4*g*m3)/(2*(-4*m1-3*m2-12*m3)*l1);
K13 = 9*m2*g/(2*(-4*m1-3*m2-12*m3)*l1);
K17 = 3*(-2*m1-m2-4*m3)/(2*(-4*m1-3*m2-12*m3)*l1);
K22 = 2*g*(m1+2*(m2+m3))/(4*m2*l2-16/9*(m1+(3*m2+m3))*l2);
K23 = 4*g*(m1+3*(m2+m3))/3/(4*m2*l2-16/9*(m1+(3*m2+m3))*l2);
K27 = (2*(m1+2*(m2+m3))-4/3*(m1+3*(m2+m3)))/(4*m2*l2-16/9*(m1+(3*m2+m3))*l2);
A = [0,0 ,0 ,1,0,0;
0,0,0,0,1,0;
0,0,0,0,0,1;
0,0,0,0,0,0;
0,K12,K13,0,0,0;
0,K22,K23,0,0,0;];
B = [0;
0;
0;
1;
K17;
K27];
C = [0.4495,4.1930,-8.8675,0.8035,0.0151,-1.5196];
[F,G] = c2d(A,B,ts);
Q = diag([1 0 1 1 0 1]);
R = [1];
[K,p,e] = dlqr(F,G,Q,R);
F = F-G*K;
%初始条件
x1_0 = 1;
x2_0 = 0;
x3_0 = 0;
x4_0 = 1;
x5_0 = 0;
x6_0 = 0;
u_0 = 0;
for k=1:1:LEN
k
time(k) = k*ts;
x1(k) = F(1,1)*x1_0+F(1,2)*x2_0+F(1,3)*x3_0+F(1,4)*x4_0+F(1,5)*x5_0+F(1,6)*x6_0+G(1)*u_0;
x2(k) = F(2,1)*x1_0+F(2,2)*x2_0+F(2,3)*x3_0+F(2,4)*x4_0+F(2,5)*x5_0+F(2,6)*x6_0+G(2)*u_0;
x3(k) = F(3,1)*x1_0+F(3,2)*x2_0+F(3,3)*x3_0+F(3,4)*x4_0+F(3,5)*x5_0+F(3,6)*x6_0+G(3)*u_0;
x4(k) = F(4,1)*x1_0+F(4,2)*x2_0+F(4,3)*x3_0+F(4,4)*x4_0+F(4,5)*x5_0+F(4,6)*x6_0+G(4)*u_0;
x5(k) = F(5,1)*x1_0+F(5,2)*x2_0+F(5,3)*x3_0+F(5,4)*x4_0+F(5,5)*x5_0+F(5,6)*x6_0+G(5)*u_0;
x6(k) = F(6,1)*x1_0+F(6,2)*x2_0+F(6,3)*x3_0+F(6,4)*x4_0+F(6,5)*x5_0+F(6,6)*x6_0+G(6)*u_0;
u =-K(1)*x1(k)-K(2)*x2(k)-K(3)*x3(k)-K(4)*x4(k)-K(5)*x5(k)-K(6)*x6(k);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
X_back(k)= u+randn/50;
c = 1e-4;
if k==1
X_back2=0;
else
X_back2=X_back(k)-X_back(k-1);
end
s = c*X_back2;
y =-inv(C*B)*(C*A*s+5*s+0.05*sign(s));
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
X(k) = min(y);
u_0 = X(k);
x1_0 = x1(k);
x2_0 = x2(k);
x3_0 = x3(k);
x4_0 = x4(k);
x5_0 = x5(k);
x6_0 = x6(k);
end
x1a=x1;
x2a=x2;
x3a=x3;
x4a=x4;
x5a=x5;
x6a=x6;
A = [0,0 ,0 ,1,0,0;
0,0,0,0,1,0;
0,0,0,0,0,1;
0,0,0,0,0,0;
0,K12,K13,0,0,0;
0,K22,K23,0,0,0;];
B = [0;
0;
0;
1;
K17;
K27];
C = [0.4495,4.1930,-8.8675,0.8035,0.0151,-1.5196];
[F,G] = c2d(A,B,ts);
Q = diag([1 0 1 1 0 1]);
R = [1];
[K,p,e] = dlqr(F,G,Q,R);
F = F-G*K;
%初始条件
x1_0 = 1;
x2_0 = 0;
x3_0 = 0;
x4_0 = 1;
x5_0 = 0;
x6_0 = 0;
u_0 = 0;
for k=1:1:LEN
k
time(k) = k*ts;
x1(k) = F(1,1)*x1_0+F(1,2)*x2_0+F(1,3)*x3_0+F(1,4)*x4_0+F(1,5)*x5_0+F(1,6)*x6_0+G(1)*u_0;
x2(k) = F(2,1)*x1_0+F(2,2)*x2_0+F(2,3)*x3_0+F(2,4)*x4_0+F(2,5)*x5_0+F(2,6)*x6_0+G(2)*u_0;
x3(k) = F(3,1)*x1_0+F(3,2)*x2_0+F(3,3)*x3_0+F(3,4)*x4_0+F(3,5)*x5_0+F(3,6)*x6_0+G(3)*u_0;
x4(k) = F(4,1)*x1_0+F(4,2)*x2_0+F(4,3)*x3_0+F(4,4)*x4_0+F(4,5)*x5_0+F(4,6)*x6_0+G(4)*u_0;
x5(k) = F(5,1)*x1_0+F(5,2)*x2_0+F(5,3)*x3_0+F(5,4)*x4_0+F(5,5)*x5_0+F(5,6)*x6_0+G(5)*u_0;
x6(k) = F(6,1)*x1_0+F(6,2)*x2_0+F(6,3)*x3_0+F(6,4)*x4_0+F(6,5)*x5_0+F(6,6)*x6_0+G(6)*u_0;
u =-K(1)*x1(k)-K(2)*x2(k)-K(3)*x3(k)-K(4)*x4(k)-K(5)*x5(k)-K(6)*x6(k);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
X_back(k)= u+randn/50;
c = 1e-4;
if k==1
X_back2=0;
else
X_back2=X_back(k)-X_back(k-1);
end
s = c*X_back2;
y =-inv(C*B)*(C*A*s+5*s+0.05*sats(s));
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
X(k) = min(y);
u_0 = X(k);
x1_0 = x1(k);
x2_0 = x2(k);
x3_0 = x3(k);
x4_0 = x4(k);
x5_0 = x5(k);
x6_0 = x6(k);
end
x1b=x1;
x2b=x2;
x3b=x3;
x4b=x4;
x5b=x5;
x6b=x6;
.............................................
三、测试结果
|
| 参数名称 | 参数数值与单位 |
| 1 | 重力加速度g | 9.81m/s2 |
| 2 | 杆1的质量m1 | 0.04kg |
| 3 | 杆2的质量m2 | 0.132kg |
| 4 | 质量块的质量m3 | 0.208kg |
| 5 | 摆杆1转动轴心到杆质心的长度l1 | 0.09m |
| 6 | 摆杆2转动轴心到杆质心的长度l2 | 0.27m |
| 7 | 采样时间T | 0.02s |
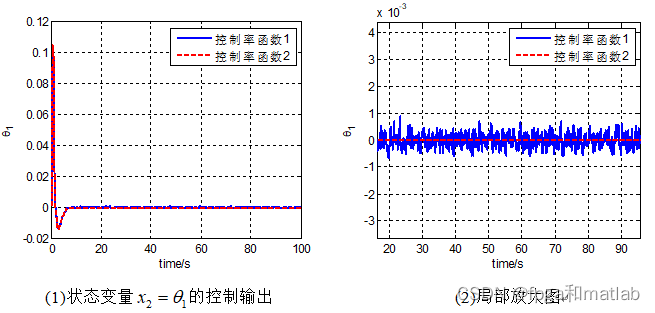
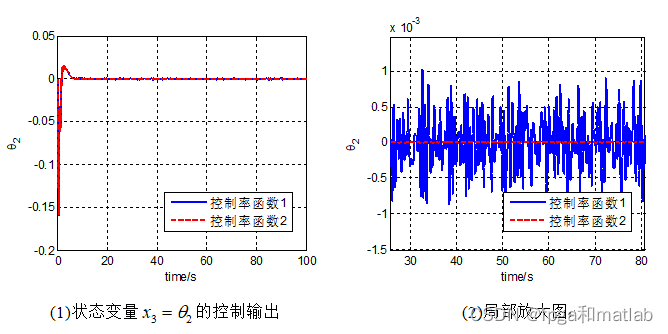
通过上述参数,得到如下的仿真结果:
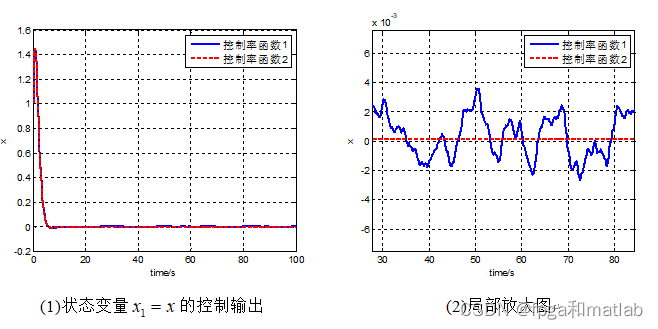
采用第二种控制律函数不仅可以达到相应的控制效果,而且可以有效降低控制系统的抖振。
A08-82
相关文章
- matlab 点云粗配准(3)—— 可视化匹配点对
- 帝国竞争算法(ICA)(Matlab代码实现)
- 多约束、多车辆VRP问题(Matlab代码实现)
- 【无人机】基于球向量的粒子群优化(SPSO)算法在无人机路径规划中的实现(Matlab代码实现)
- 基于萤火虫算法优化的BP神经网络预测模型(Matlab代码实现)
- 基于bp神经网络汽车自动变速器最佳挡位判断(Matlab代码实现)
- 基于随机蛙跳算法(SFLA)的生产调度问题(Matlab代码实现)
- (Matlab)遗传算法优化的BP神经网络实现回归预测
- 基于PID、H_2和H_∞控制器的车辆横向动力学非线性MIMO-PID神经控制器设计(Matlab代码实现)
- 【图像分割】基于局部质心的无监督的2D 和 3D 图像分割(Matlab代码实现)
- 基于MATLAB的车牌识别系统研究(Matlab代码实现)
- 【深度学习】基于Hough变化的答题卡识别(Matlab代码实现)
- 基于原子势函数及人工蜂群算法进行形状匹配优化(Matlab代码实现)
- m基于MIMO通信系统的半盲信道估计算法matlab仿真,包括QPSK,ML检测,Turbo编译码等
- m基于matlab的TDSCDMA系统性能仿真
- 基于蚁群算法的二维路径规划matlab仿真
- m基于LPF-VMD和KELM的鸟群优化算法的风速预测算法matlab仿真
- m基于MSER最大稳定极值区域和SVM的交通标志检测识别算法的matlab仿真
- 基于hough变换的条形码数字分割和数字识别matlab仿真
- 基于Surf+GTM的图像配准和拼接算法matlab仿真
- 基于RNN神经网络的系统参数辨识matlab仿真
- Matlab绘制幅值谱和相位谱
- 【MATLAB】流程控制 ( 循环结构 | for 循环 | while 循环 | 分支结构 | if end 分支结构 | if else end 分支结构 | switch case 分支结构 )
- 灰狼优化算法(Matlab完整代码实现)
- 【语音分离】基于平均谐波结构建模的无监督单声道音乐声源分离(Matlab代码实现)
- 【无线通信】使用凸优化来调整基于毫米波的无线通信参数(Matlab代码实现)
- 基于matlab的AES加解密算法仿真
- Matlab使用笔记(八):MATLAB建立无人驾驶场景并生成综合检测