
【LCMV】基于LCMV的参数辨识算法matlab仿真
2023-09-11 14:15:33 时间
1.软件版本
MATLAB2013b
2.本算法理论知识
算法源于文献:

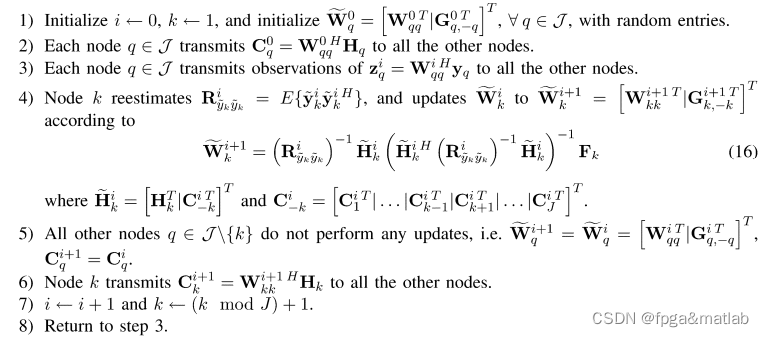

3.部分核心代码
clc;
clear;
close all;
warning off;
Num_Sensor = 16;
Num_signal = 2;
Num_babe = 2;
b = zeros(Num_Sensor,1);
H = zeros(Num_Sensor,Num_signal);
DOA = zeros(Num_signal,1);
wavelength = 0.06;
Iteration = 1:1:20;
SNR = 12;
d = 0.5*wavelength*ones(Num_Sensor,1);%阵元间距
f = zeros(Num_signal,1);
f(1) = 1;
Len_Signal = 100000;
Len_train = round(0.01*Len_Signal);
%设置延迟长度
Len_delays = round(0.05*Len_Signal);
Train_Signal = zeros(Num_signal,Len_train);
Train_Noise = zeros(Num_Sensor,Len_train);
%信号和噪声以及反射信号和反射噪声
Signal = zeros(Num_signal,Len_Signal);
Noise = zeros(Num_Sensor,Len_Signal);
%全值,LCMV不需要进行迭代更新
W = zeros(Num_Sensor,1);
%根据所提供的场景,设置各个入射信号的方位角
DOA = [0,pi-atan(2)];
%根据场景设置H(tableI算法为H已知,所以根据场景来设置)
for jj=1:Num_signal
for ii=1:Num_Sensor
b(ii)=exp(-j*2*pi*(ii-1)*d(ii)*sin(DOA(jj))/wavelength) ;
end
H(:,jj)=b/(b'*b)^0.5;
end
%产生两路随机信号
Signalo = randint(Num_signal,Len_Signal);
Signalo = 2*(Signalo-0.5);
%反射信号
for i = 1:Num_signal
Signal_reflect(i,:) = 0.2*[zeros(1,Len_delays),Signal(i,1:Len_Signal-Len_delays)];
end
Signal = Signalo;
%产生babe噪声源
babble = randn(Num_signal,Len_Signal)+j*randn(Num_signal,Len_Signal);
babble = 2*(babble-0.5);
for i = 1:Num_signal
babble_reflect(i,:) = 0.2*[zeros(1,Len_delays),babble(i,1:Len_Signal-Len_delays)];
end
%实际输入到麦克风的声源
Signal = (Signalo + Signal_reflect + babble + babble_reflect)/4;
%传感器之间的噪声干扰
Noise = randn(Num_Sensor,Len_Signal)+j*randn(Num_Sensor,Len_Signal);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
SNRs = zeros(1,length(Iteration));
%在几种不同的信噪比下计算误码率
diBi = 1/(2*10^(SNR/10))^0.5;
Noise = Noise*diBi;
for Iter = Iteration
Iter
Train_Signal = Signal(:,(1:Len_train));
Train_Noise = Noise(:,(1:Len_train));
x = H*Train_Signal + Train_Noise; %加噪声
x1 = H*Signal + Noise; %加噪声
%LCMV
R = x*x';
W = inv(R)*H*inv((H'*inv(R)*H))*f;
y = W'*x1;
%以第一个信号源为准计算,如果是第二个信号源,也是同样处理
%计算SNR值
SNRs(Iter) = 10*log10(mean(abs(y(1,:)).^2)/mean(abs(Noise(1,:)).^2));
%计算SDR值
SDRs(Iter) = 10*log10(mean(abs(Signal(1,:)).^2)/mean(abs(Signal(1,:)-y(1,:)).^2));
end
figure;
subplot(211);
plot(Iteration,SNRs,'b--','LineWidth',2);
xlabel('Iteration');
ylabel('SNR[dB]')
axis([0,20,0,15]);
subplot(212);
plot(Iteration,SDRs,'b--','LineWidth',2);
xlabel('Iteration');
ylabel('SDR[dB]')
axis([0,20,0,15]);
save fig3.mat SNRs SDRs Iteration
%计算后面的MSE值
save w_mat.mat W
4.操作步骤与仿真结论
我们对tableI的算法进行仿真,同时给出了用于对比的LCMV算法,通过对比,我们得到如下的仿真结果:
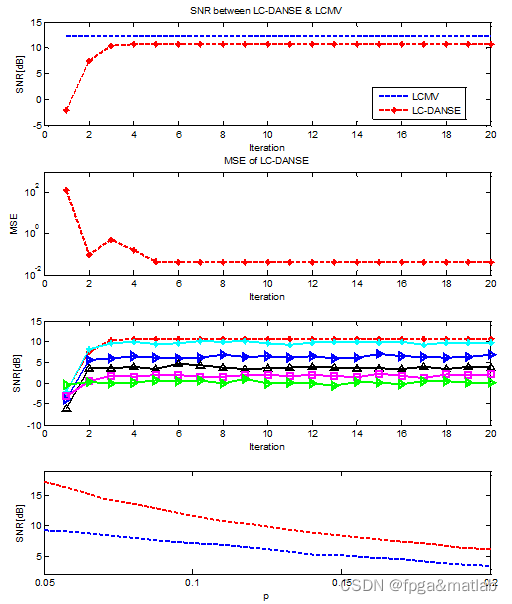
图一:LCMV和LC-DANSE的SNR对比仿真图;
图二:LC-DANSE的MSE图(论文中MSE只是DANSE系列的对比,TableI对应其中一种)
图三:LC-DANSE中不同P之的SNR图。
图四:LCMV和LC-DANSE的随着p变化的SNR图。A27-03
相关文章
- 【机器学习】 Matlab 2015a 自带机器学习算法汇总
- matlab 五点三次平滑算法
- 多目标蚂蚁狮子优化算法(Matlab代码实现)
- 基于小生境粒子群优化算法的考虑光伏波动性的主动配电网有功无功协调优化(Matlab代码实现)
- 计及需求响应的基于改进天牛须算法算法的孤岛微电网优化调度(Matlab代码实现)
- Matlab中算法结合Simulink求解直流微电网中功率
- 基于Dijkstra和A*算法的机器人路径规划(Matlab代码实现)
- 【物流中心选址】智能优化算法在物流中心选址的应用(Matlab代码实现)
- 基于萤火虫算法优化的BP神经网络预测模型(Matlab代码实现)
- 基于粒子群优化和模拟退火算法增强传统聚类研究(Matlab代码实现)
- 基于模拟退火算法的车间调度优化matlab仿真,输出甘特图
- m基于GA遗传优化的BP神经网络时间序列预测算法matlab仿真
- m基于遗传优化算法的公式参数拟合matlab仿真
- m云计算任务调度优化matlab仿真,输出成本,时间,负荷优化结果,对比ACO,PSO,WOA三种优化算法
- m基于LOC-PCA算法的人脸重建算法matlab仿真,给定人物侧脸实现正脸重建
- m基于简化后的轻量级yolov4深度学习网络农作物检测算法matlab仿真
- m基于AlexNet神经网络和GEI步态能量图的步态识别算法MATLAB仿真
- 基于EM算法的参数辨识和分类识别算法matlab仿真
- m基于FPGA的LDPC最小和译码算法verilog实现,包括testbench和matlab辅助验证程序
- 改进遗传算法结合猫群优化算法(CSO)(Matlab完整代码实现)
- 【车间调度】基于改进模因算法的考虑工人安排的分布式灵活作业车间调度问题(Matlab代码实现)
- 基于智能优化算法PSO/GWO/AFO+柔性车间生产调度(Matlab代码实现)
- 基于6自由度飞行器的EKF和INS融合算法的MATLAB仿真
- m基于最小生成树算法的无线传感器网络MCDS生成matlab仿真
- 基于MFCC特征提取和神经网络的语音信号识别算法matlab仿真
- m基于BP译码算法的QC-LDPC误码率matlab仿真,对比不同译码迭代次数的误码率性能