
【模糊神经网络】基于matlab的模糊神经网络仿真
1.软件版本
matlab2013b
2.系统概述
·第一个模型:
 ;
;![]()
·第二个模型
 ;
;![]() ,U=13.012
,U=13.012
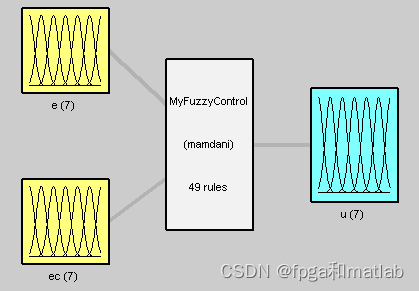
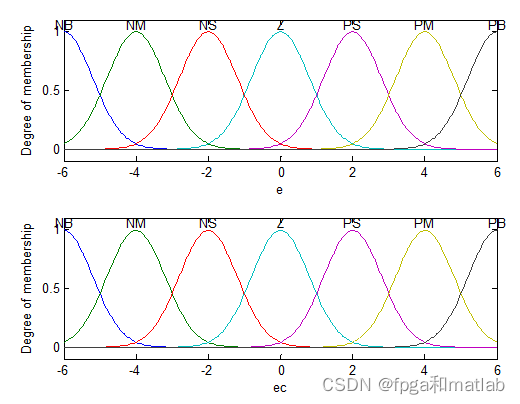
第一:隶属函数的设计

隶属函数的设计,可以通过模糊编辑器,也可以通过如上的代码进行设计。
第二:模糊规则的设计
通过输入模糊规则量化表进行设计,所得到的模糊规则如下所示:
1. If (e is NB) and (ec is NB) then (u is PB) (1)
2. If (e is NB) and (ec is NM) then (u is PB) (1)
3. If (e is NB) and (ec is NS) then (u is PM) (1)
4. If (e is NB) and (ec is Z) then (u is PM) (1)
5. If (e is NB) and (ec is PS) then (u is PS) (1)
6. If (e is NB) and (ec is PM) then (u is PS) (1)
7. If (e is NB) and (ec is PB) then (u is Z) (1)
8. If (e is NM) and (ec is NB) then (u is PB) (1)
9. If (e is NM) and (ec is NM) then (u is PM) (1)
10. If (e is NM) and (ec is NS) then (u is PM) (1)
11. If (e is NM) and (ec is Z) then (u is PS) (1)
12. If (e is NM) and (ec is PS) then (u is PS) (1)
13. If (e is NM) and (ec is PM) then (u is Z) (1)
14. If (e is NM) and (ec is PB) then (u is NS) (1)
15. If (e is NS) and (ec is NB) then (u is PM) (1)
16. If (e is NS) and (ec is NM) then (u is PM) (1)
17. If (e is NS) and (ec is NS) then (u is PS) (1)
18. If (e is NS) and (ec is Z) then (u is PS) (1)
19. If (e is NS) and (ec is PS) then (u is Z) (1)
20. If (e is NS) and (ec is PM) then (u is NS) (1)
21. If (e is NS) and (ec is PB) then (u is NS) (1)
22. If (e is Z) and (ec is NB) then (u is PM) (1)
23. If (e is Z) and (ec is NM) then (u is PS) (1)
24. If (e is Z) and (ec is NS) then (u is PS) (1)
25. If (e is Z) and (ec is Z) then (u is Z) (1)
26. If (e is Z) and (ec is PS) then (u is NS) (1)
27. If (e is Z) and (ec is PM) then (u is NS) (1)
28. If (e is Z) and (ec is PB) then (u is NM) (1)
29. If (e is PS) and (ec is NB) then (u is PS) (1)
30. If (e is PS) and (ec is NM) then (u is PS) (1)
31. If (e is PS) and (ec is NS) then (u is Z) (1)
32. If (e is PS) and (ec is Z) then (u is NS) (1)
33. If (e is PS) and (ec is PS) then (u is NS) (1)
34. If (e is PS) and (ec is PM) then (u is NM) (1)
35. If (e is PS) and (ec is PB) then (u is NM) (1)
36. If (e is PM) and (ec is NB) then (u is PS) (1)
37. If (e is PM) and (ec is NM) then (u is PS) (1)
38. If (e is PM) and (ec is NS) then (u is Z) (1)
39. If (e is PM) and (ec is Z) then (u is NS) (1)
40. If (e is PM) and (ec is PS) then (u is NM) (1)
41. If (e is PM) and (ec is PM) then (u is NM) (1)
42. If (e is PM) and (ec is PB) then (u is NB) (1)
43. If (e is PB) and (ec is NB) then (u is Z) (1)
44. If (e is PB) and (ec is NM) then (u is NS) (1)
45. If (e is PB) and (ec is NS) then (u is NS) (1)
46. If (e is PB) and (ec is Z) then (u is NM) (1)
47. If (e is PB) and (ec is PS) then (u is NM) (1)
48. If (e is PB) and (ec is PM) then (u is NB) (1)
49. If (e is PB) and (ec is PB) then (u is NB) (1)
第三:控制闭环的设计
通常,一个传统的模糊控制器的闭环结构如下所示:
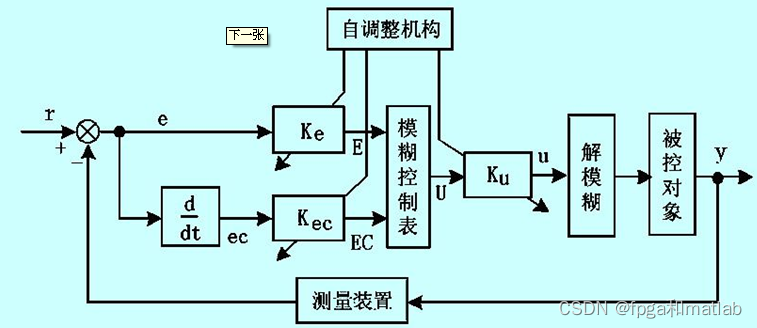
模糊控制器的基本结构:
3.部分源码
addpath 'func\'
title_function
%初始化
fnn_parameter;
%被控对象
a1 = 1.2;
b1 = 1;
b2 = 0.8;
b3 = 0;
ta = 40;
sys = tf(a1,[b1,b2,b3]);
dsys = c2d(sys,0.1,'z');
[num,den] = tfdata(dsys,'v');
ts = 0.1;%采样时间T=0.1
%闭环控制器
for k=1:SIM_times
k
time(k) = k*ts;
%定义输入信号
yd(k) = 2;
%定义输出信号
if k < ta
yn = 0;
else
yn = -den(2)*y1 - den(3)*y2 + num(2)*u1 + num(3)*u2;
end
y2 = y1;
y1 = yn;
y(k) = yn;
u2 = u1;
e2 = e1;
e1 = yd(k)-yn;
e(k) = e1;
ec =(e1-e2);
x1 =(1-exp(-10*e1))/(1+exp(-10*e1));
x2 =(1-exp(-ec))/(1+exp(-ec));
%第1层输出
for i=1:7
o11(i) = x1;
o12(i) = x2;
end
o1=[o11;o12];
%第2层输出
for i=1:2
for j=1:7
z1(i,j) =-((o1(i,j)-a(i,j))^2)/(b(i,j));
o2(i,j) = exp(z1(i,j));
end
end
%第3层输出
for j=1:7
for l=1:7
o3((j-1)*7+l)=o2(1,j)*o2(2,l);
end
end
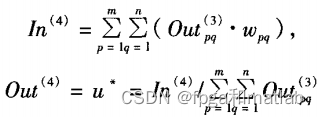
%第4层输出
I=0;
for i=1:49
I = I + o3(i)*Weight(i)/4;
end
o4 = I/(sum(o3));
u(k) = o4;
u1 = o4;
%梯度下降法调整权值
for i=1:49
dwp = e1*du*o3(i)/(sum(o3));
%迭代
Weight(i) = Weight(i) + eta*dwp;
end
%中心值更新
da11=zeros(1,7);
for j=1:7
for l=1:7
da11(j) = da11(j)+(o2(2,l)*((Weight((j-1)*7+l)*sum(o3))-I));
end
da12(1,j) = -e1*du*(2*(o1(1,j)-a(1,j))*(o2(1,j)))/((b(1,j)^2)*(sum(o3))^2);
da1(j) = (da12(1,j))*(da11(j));
end
da21 = zeros(1,7);
for j=1:7
for l=1:7
da21(j) = da21(j)+(o2(1,l)*((Weight((l-1)*7+j)*sum(o3))-I));
end
da22(2,j) = -e1*du*(2*(o1(2,j)-a(2,j))*(o2(2,j))/((b(2,j)^2)*(sum(o3))^2));
da2(j) = (da22(2,j))*(da21(j));
end
da=[da1;da2];
for i=1:2
for j=1:7
a(i,j)=a(i,j)-eta*da(i,j);
end
end
a_s(:,:,k) = a;
if k == 1
a_(:,:,k) = a_s(:,:,1);
else
for i = 1:2
for j = 1:7
dist_tmp(i,j) = (a_s(i,j,k) - a_(i,j))^2;
end
end
dist = sqrt(sum(sum(dist_tmp)));
if dist < 0.1
tmps(:,:,1) = a_(:,:,k-1);
tmps(:,:,2) = a_s(:,:,k);
a_(:,:,k) = mean(tmps(:,:,1:2),3);
else
a_(:,:,k) = a_(:,:,k-1);
end
end
a = a_(:,:,k);
%宽度更新
db11=zeros(1,7);
for j=1:7
for l=1:7
db11(j)=db11(j)+(o2(2,l)*((Weight((j-1)*7+l)*sum(o3))-I));
end
db12(1,j)=-e1*du*(2*(o1(1,j)-a(1,j))^2)*(o2(1,j))/((b(1,j)^3)*(sum(o3))^2);
db1(j)=(db12(1,j))*(db11(j));
end
db21=zeros(1,7);
for j=1:7
for l=1:7
db21(j)=db21(j)+(o2(1,l)*((Weight((l-1)*7+j)*sum(o3))-I));
end
db22(2,j)=-e1*du*(2*(o1(2,j)-a(2,j))^2)*(o2(2,j))/((b(2,j)^3)*(sum(o3))^2);
db2(j)=(db22(2,j))*(db21(j));
end
db=[db1;db2];
for i=1:2
for j=1:7
b(i,j)=b(i,j)-eta*db(i,j);
end
end
b_s(:,:,k) = b;
if k == 1
b_(:,:,k) = b_s(:,:,1);
else
for i = 1:2
for j = 1:7
dist_tmp(i,j) = (b_s(i,j,k) - b_(i,j))^2;
end
end
dist = sqrt(sum(sum(dist_tmp)));
if dist < 0.1
tmps(:,:,1) = b_(:,:,k-1);
tmps(:,:,2) = b_s(:,:,k);
b_(:,:,k) = mean(tmps(:,:,1:2),3);
else
b_(:,:,k) = b_(:,:,k-1);
end
end
b = b_(:,:,k);
%算法
s11 = y1;
s12 = y2;
s13 = u1;
s14 = u2;
s1 =[s11;s12;s13;s14];
for i=1:5
net2(i) = w2(i,:)*s1 + theta2(i);
s2(i) = (1-exp(-net2(i)))/(1+exp(-net2(i)));
end
net3 = w3*s2+theta3;
yg = am*(1-exp(-net3))/(1+exp(-net3));
for i=1:5
delta2(i)=0.5*(1-s2(i))*(1+s2(i));
end
delta3=0.5*am*(1-yg/am)*(1+yg/am);
for i=1:5
theta22(i) = theta2(i)-theta21(i);
theta21(i) = theta2(i);
theta2(i) = theta2(i)+eta1*(yn-yg)*delta3*w3(i)*delta2(i)+beta1*theta22(i);
end
theta32 = theta3-theta31;
theta31 = theta3;
theta3 = theta3+eta1*(yn-yg)*delta3+beta1*theta32;
for i=1:5
for j=1:4
w22(i,j) = w2(i,j)-w21(i,j);
w21(i,j) = w2(i,j);
w2(i,j) = w2(i,j)-eta1*(yn-yg)*delta3*w3(i)*delta2(i)*s1(j)+beta1*w22(i,j);
end
w32(i) = w3(i)-w31(i);
w31(i) = w3(i);
w3(i) = w3(i)-eta1*(yn-yg)*delta3*s2(i)+beta1*w32(i);
end
a2 = am-a1;
a1 = am;
am = am+eta1*(yn-yg)*yg/am+beta1*a2;
sum1 = 0;
for i=1:5
sum1 = sum1 + w3(i)*delta2(i)*w2(i,3);
end
du = delta3*sum1;
end
figure;
plot(time,y,'r', time,yd,'b');
grid on
figure;
subplot(121);
plot(a_s(1,:,SIM_times),a_s(2,:,SIM_times),'o');
grid on
axis square
subplot(122);
plot(b_s(1,:,SIM_times),b_s(2,:,SIM_times),'o');
grid on
axis square
save Simu_Results\fnn_result.mat time y
save Simu_Results\nfis.mat a b
这里重点介绍一下模糊神经网络控制器的设计,
第一:四层化神经网络层的结构设计:
第1层:
![]()
第2层:

![]()
第3层:

![]()
第4层:

第二:利用梯度下降法进行权值更新

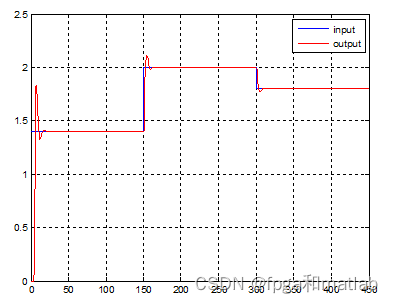
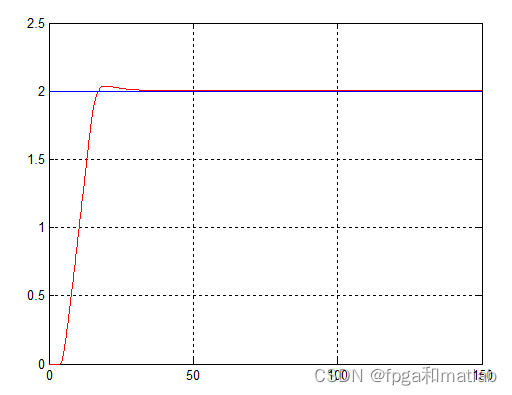
4.仿真结果
模糊控制效果图(模型一):
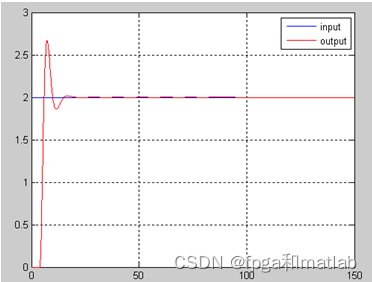
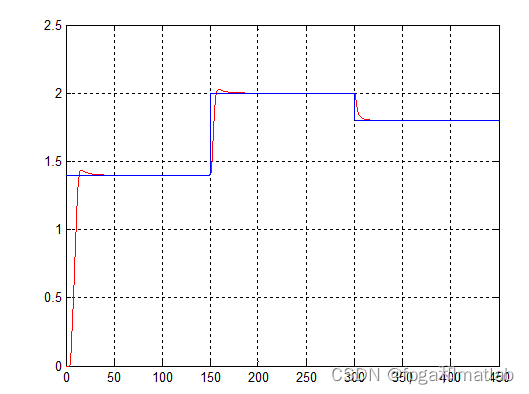
模糊控制效果图(模型二):
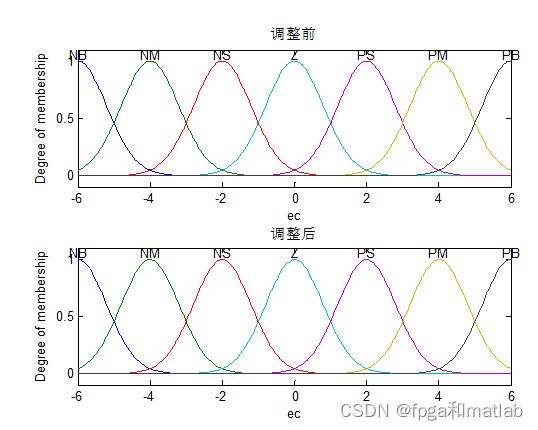
隶属函数如下所示:



A05-06
相关文章
- 基于遗传算法优化BP神经网络的光伏出力预测研究(Matlab代码实现)
- 多种控制率算法的实现案例(LQR、H无穷和神经网络算法等)(Matlab代码实现)
- 复杂环境下多移动机器人路径规划研究(Matlab代码实现)
- 基于萤火虫算法优化的BP神经网络预测模型(Matlab代码实现)
- 基于Jaya优化JAYA前馈神经网络FNN研究(Matlab代码实现)
- 基于遗传算法的BP神经网络技术的应用(Matlab代码实现)
- 基于BP神经网络的轨迹跟踪(Matlab代码实现)
- 基于粒子群优化神经网络(Matlab代码实现)
- 基于RBF神经网络的非线性系统识别(Matlab代码实现)
- 基于改进神经网络的风电功率预测(Matlab代码实现)
- 基于遗传算法的BP神经网络在汇率预测中的应用研究(Matlab代码实现)
- 基于模拟退火算法优化的BP神经网络预测模型(Matlab代码实现)
- 基于竞争学习的混沌神经网络算法用于全局优化(Matlab代码实现)
- 网格搜索多个监督学习模型上的超参数,包括神经网络、随机森林和树集合模型(Matlab代码实现)
- 模拟不同MIMO-OFDM方案的MATLAB代码(Matlab代码实现)
- 基于MATLAB中雷达和视觉合成数据的目标级传感器融合(Matlab代码实现)
- 【MATLAB】matlab遗传算法工具使用
- m基于GRNN神经网络和高阶累积量的信号类型识别matlab仿真
- m基于RBF神经网络和BP神经网络的信道估计误码率matlab仿真
- 基于遗传算法优化的BP神经网络图像分割matlab仿真
- m基于GRNN广义回归神经网络和HOG特征提取的人体姿态检测识别matlab仿真,样本集为TOF深度图
- 基于FNN模糊神经网络的控制器解耦控制matlab仿真
- 基于CNN卷积神经网络的minst数据库手写字识别matlab仿真
- Matlab R2018a无法重新加载 /usr/local/MATLAB/R2018a/bin/glnxa64/libmwxcp_dwarf.so
- 【语音编码】基于matlab ADPCM编解码【G.723.1】(Matlab代码实现)
- 【车间调度】基于卷积神经网络的柔性作业车间调度问题的两阶段算法(Matlab代码实现)
- Matlab使用笔记(四):将编写完matlab函数放入simulink模型
- Matlab使用笔记(七):将PreScan连接MATLAB实现仿真 (附录:自动无人驾驶仿真软件PreScan的应用介绍)