
机器人控制算法六之 ROS关键使用及仿真总结
机器人 总结 仿真 关键 ros 使用 控制算法
2023-09-14 09:14:39 时间
1.查看ros版本
#打开终端输入
roscore
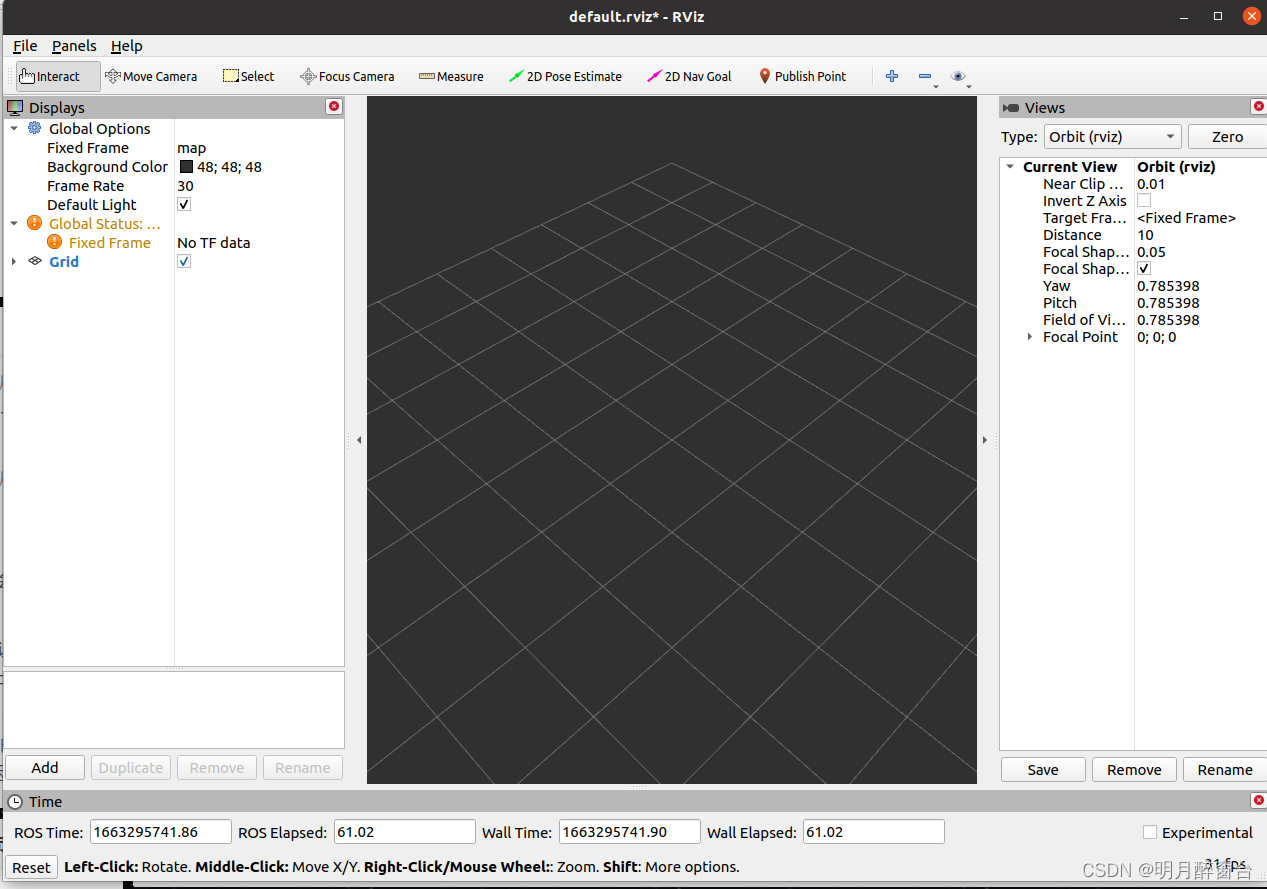
2.打开Rviz
case1:打开两个终端
#终端1输入:
roscore
#终端2输入:
rosrun rviz rviz
3. ROS仿真步骤
3.1 创建工作空间
桌面打开终端跳转主目录:

- 1.创建工作空间爱你
mkdir catkin_ws
相关文章
- 25台机器人=18名搬运工,我在徐福记工厂,围观了给旷视河图的落地现场
- UT Austin朱玉可主讲,CS391R 2021秋季课程上线,专注机器人感知与决策
- 无界 | Bncr | Boundless Nodejs Chat Robot 机器人框架安装使用教程
- 荷兰银行用机器人取代5800名员工,什么业务岗位会中招?
- 关于机器人抢饭碗的种种忧虑, AI 专家们在白宫会议上是这样说的
- 为什么我选择并且推崇用ROS开发机器人?
- 预告:基于树莓派如何开发机器人 | 硬创公开课
- 专访科沃斯国际事业部总裁,谈中国、欧洲扫地机器人市场差异
- 看它72变,不仅能随时“变身”、还能游泳滑翔的“Prime”机器人
- 商用性爱机器人明年发售,社会进步还是道德沦丧?