
机器人控制算法三之urdf模型文件编写及rviz仿真可视化
2023-09-14 09:14:39 时间
机器人控制算法三之四轴机械臂urdf模型文件编写及rviz仿真可视化
简介:网上经常会遇到不同的urdf模型通过CAD建模建模软件导出或者手动编写,终究逃不多要经过自己编写的命运~~~,关于运动学逆解(C++实现)的问题可以参考我的另一篇文章 机器人控制算法四之迭代法求解四轴机器人逆解:https://blog.csdn.net/yohnyang/article/details/126768992
本文详细介绍了机械臂的urdf模型文件从头开始编写,并通过注释详细注明了每个LInk、joint属性、空间变换各个参数的取值情况,如果不了解语法规则,那编写起来将贼难受…
附:ROS中文教程(含urdf使用教程):ROS中文教程 - urdf详解
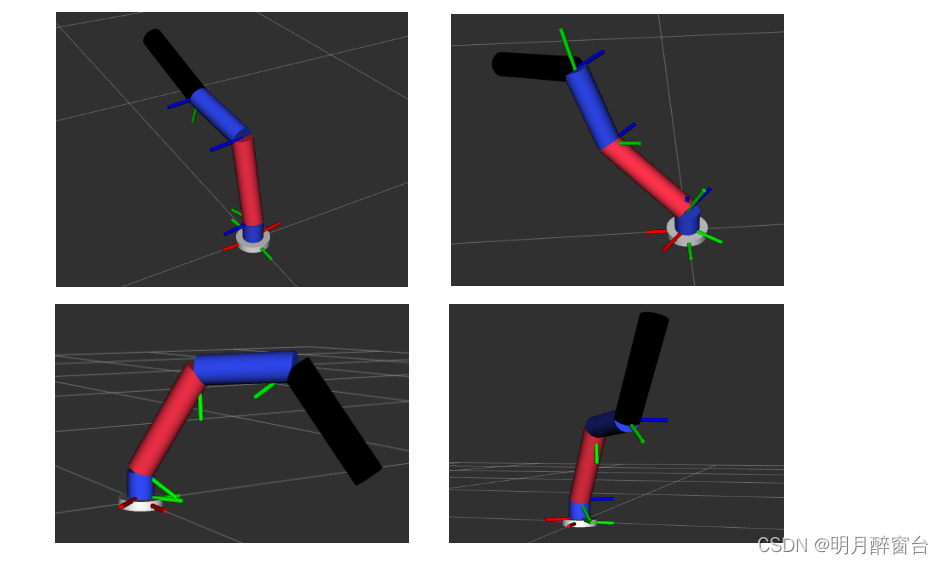
浅看一下效果,如下:
1. 创建工作空间
相关文章
- ueditor1.4.3配置过程(包含单独上传文件以及图片的使用),ueditor1.4.3上传配置(转 http://www.bkjia.com/webzh/1001016.html)
- PHP输出XML文件函数
- 倍福TwinCAT(贝福Beckhoff)基础教程4.1 TwinCAT如何读写TXT文件
- python操作zip文件
- python实现钉钉文件上传发送,钉钉机器人接收信息
- 《安富莱嵌入式周报》第308期:开源带软硬件安全认证的PLC设计,开源功率计,可靠PID实现,PR2机器人设计文件全开源,智能手表设计WASP-OS
- 基于STM32的ThreadX GUIX的工程模板发布,1452个源码文件,请准备好一台性能强劲的电脑,否则后果自负^_^
- 同时实现选中文件并上传功能
- ML之FE:基于单个csv文件数据集(自动切分为两个dataframe表)利用featuretools工具实现自动特征生成/特征衍生
- C++:读写二进制bin文件到double数组
- (4)C#工程文件介绍