
电动汽车无线充电中的电磁场图研究(Matlab代码实现)
👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述

数据集文件
(1)所有文件夹都已压缩。数据集总数 = 680。
(2)以下是10个Zip文件夹
- 3d7_100
- 3d7_200
- 3d7_300
- 3d7_400
- 3d7_500
- 3d7_600
- 3d7_700
- 3d7_800
- 3d7_900
- 3d7_1000
(3)以上zip文件夹根据充电功率和频率而定。3天7是3.7千瓦
(4) 10种不同的开关频率是
- 100千赫
- 200千赫
- 300千赫
- 400千赫
- 500千赫
- 600千赫
- 700千赫
- 800千赫
- 900千赫
- 1000千赫
(5) 因此,zip 文件夹“3d7_100”在 100 kHz 时为 3.7 kW,......“3d7_800”在 800 kHz 时为 3.7 kW。等。
Z.csv是频率(100,...1MHz)泵站的独立充电器。
Z1.csv是频率(100,...1MHz)泵站的独立充电器。
Z2.csv是频率(100,...1MHz),当电动汽车在泵站站立并无线充电时。
D.csv是频率(100,...1MHz)泵站的独立充电器。
D1.csv 是前 50 个方向性值的方向性,频率 (100, ...1MHz)泵站的独立充电器。
D2.csv 是前 100 个方向性值的方向性,频率 (100, ...1MHz)泵站的独立充电器。
D3.csv 是前 500 个方向性值的方向性,频率 (100, ...1MHz)泵站的独立充电器。
D4.csv 是前 1000 个方向性值的方向性,频率 (100, ...1MHz)泵站的独立充电器。
D5.csv 是前 2500 个方向性值的方向性,频率 (100, ...1MHz)泵站的独立充电器。
Da.csv是频率(100,...1MHz),当电动汽车在泵站站立并无线充电时。
D1a.csv 是前 50 个方向性值的方向性,频率 (100, ...1MHz),当电动汽车在泵站站立并无线充电时。
D2a.csv是前 100 个方向性值的方向性,频率 (100, ...1MHz),当电动汽车在泵站站立并无线充电时。
D3a.csv 是前 500 个方向性值的方向性,频率 (100, ...1MHz),当电动汽车在泵站站立并无线充电时。
D4a.csv是前 1000 个方向性值的方向性,频率 (100, ...1MHz),当电动汽车在泵站站立并无线充电时。
D5a.csv 是前 2500 个方向性值的方向性,频率 (100, ...1MHz),当电动汽车在泵站站立并无线充电时。
p1.csv是频率(100,...1MHz)泵站的独立充电器。
p2.csv是频率(100,...1MHz)泵站的独立充电器。
p3.csv是频率(100,...1MHz),当电动汽车在泵站站立并无线充电时。
p4.csv是频率(100,...1MHz),当电动汽车在泵站站立并无线充电时。
P5.csv是频率(100,...1MHz)泵站的独立充电器。
P6.csv是频率(100,...1MHz)泵站的独立充电器。
P7.csv是频率(100,...1MHz)泵站的独立充电器。
p8.csv是频率(100,...1MHz),当电动汽车在泵站站立并无线充电时。
p9.csv是频率(100,...1MHz),当电动汽车在泵站站立并无线充电时。
p10..csv 是频率 (100, ...1MHz),当电动汽车在泵站站立并无线充电时。
P11.csv是泵站独立充电器在参考阻抗为50欧姆时的电压驻波比。
P12.csv是当电动汽车在泵站站立并无线充电时,参考阻抗为25欧姆时的电压驻波比。
P13.csv是当电动汽车在泵站站立并无线充电时,参考阻抗为50欧姆时的电压驻波比。
P14.csv是当电动汽车在泵站站立并无线充电时,参考阻抗为 75 欧姆时的电压驻波比。
P15.csv是当电动汽车在泵站站立并无线充电时,参考阻抗为 150 欧姆时的电压驻波比。
P16.csv是当电动汽车在泵站站立并无线充电时,参考阻抗为175欧姆时的电压驻波比。
P17.csv是当电动汽车在泵站站立并无线充电时,参考阻抗为 200 欧姆时的电压驻波比。
P18.csv是当电动汽车在泵站站立并无线充电时,参考阻抗为 250 欧姆时的电压驻波比。
P19.csv是当电动汽车在泵站站立并无线充电时,参考阻抗为300欧姆时的电压驻波比。
P20.csv是当电动汽车在泵站站立并无线充电时,参考阻抗为350欧姆时的电压驻波比。
P21.csv是当电动汽车在泵站站立并无线充电时,参考阻抗为400欧姆时的电压驻波比。
P22.csv是当电动汽车在泵站站立并无线充电时,参考阻抗为 500 欧姆时的电压驻波比。
P23.csv是当电动汽车在泵站站立并无线充电时,参考阻抗为 600 欧姆时的电压驻波比。
P24.csv是当电动汽车在泵站站立并无线充电时,参考阻抗为 700 欧姆时的电压驻波比。
P25.csv是当电动汽车在泵站站立并无线充电时,参考阻抗为800欧姆时的电压驻波比。
P26.csv是当电动汽车在泵站站立并无线充电时,参考阻抗为 900 欧姆时的电压驻波比。
P27.csv是当电动汽车在泵站站立并无线充电时,参考阻抗为 1000 欧姆时的电压驻波比。
P28.csv是当电动汽车在泵站站立并无线充电时,参考阻抗为 1200 欧姆时的电压驻波比。
P29.csv是当电动汽车在泵站站立并无线充电时,参考阻抗为1400欧姆时的电压驻波比。
P30.csv是当电动汽车在泵站站立并无线充电时,参考阻抗为1600欧姆时的电压驻波比。
P31.csv是当电动汽车在泵站站立并无线充电时,参考阻抗为 1800 欧姆时的电压驻波比。
P32.csv是当电动汽车在泵站站立并无线充电时,参考阻抗为 2000 欧姆时的电压驻波比。
P33.csv是当电动汽车在泵站站立并无线充电时,参考阻抗为 2500 欧姆时的电压驻波比。
E1.csv是电场和磁场
e2.csv是电场和磁场
E3.csv是电场和磁场
E4.csv是电场和磁场
E5.csv是泵站的独立充电器的电场和磁场,位于发射线圈上方0.3英尺处,但没有车辆。
E6.csv是电场和磁场,当电动汽车在充电器和车辆之间的距离处在泵站站立并无线充电时,距离为0.3英尺。
E7.csv是泵站的独立充电器的电场和磁场,位于发射线圈上方0.4英尺处,但没有车辆。
e8.csv是电场和磁场,当电动汽车站立并在泵站无线充电时,充电器与车辆之间的距离为0.4英尺。
E9.csv是泵站独立充电器的电场和磁场,位于发射线圈上方0.5英尺处,但没有车辆。
E10.csv是电场和磁场,当电动汽车在充电器和车辆之间的距离处在泵站站立并无线充电时,距离为0.5英尺。
E11.csv是泵站的独立充电器的电场和磁场,位于发射线圈上方0.6英尺处,但没有车辆。
E12.csv是电场和磁场,当电动汽车在充电器和车辆之间的距离为0.6英尺处在泵站站立并无线充电时。
E13.csv是位于发射线圈上方0.7英尺但没有车辆的泵站独立充电器的电场和磁场。
E14.csv是电场和磁场,当电动汽车站立并在泵站无线充电时,充电器与车辆之间的距离为0.7英尺。
E15.csv是泵站独立充电器的电场和磁场,位于发射线圈上方1英尺处,但没有车辆。
E16.csv是电场和磁场,当电动汽车站立并在泵站无线充电时,充电器与车辆之间的距离为1英尺。
E17.csv是泵站独立充电器的电场和磁场,位于发射线圈上方2英尺处,但没有车辆。
E18.csv是电场和磁场,当电动汽车在充电器和车辆之间的距离为2英尺处在泵站站立并无线充电时。
E19.csv是泵站的独立充电器的电场和磁场,位于发射线圈上方3英尺处,但没有车辆。
e20.csv是电场和磁场,当电动汽车在充电器和车辆之间的距离为3英尺的泵站站立并无线充电时。
数据可以以各种方式研究和使用。
(1)数据集或研究论文中给出的值可用于不同的原型设计。
(2)由于数据集具有辐射图谱、电磁场数据,对于各种变体,节省了行业、原型研发成本。因此,超过1个行业可以使用这些价值观并设计产品并在实践中实施。
(3)电磁场和辐射是已知的。该数据集可供能源审计公司,制造商,研发工程师,铁路,地铁,医疗,运输,核能,化学,国防,军事等使用。
(4)数据集可以加载到专有软件或有限元或其他模拟软件的试用版中,以再生相同的模型或其他模型或进行其他研究。
(5)还给出了每个实验中完整数据集的集体图。为了进行更精细的分析,数据集可用于以更短的间隔查看详细信息。
(6)可以将数据集加载到软件中以记录或观看动画/视频。视频将显示发射和光谱超过该频率范围。
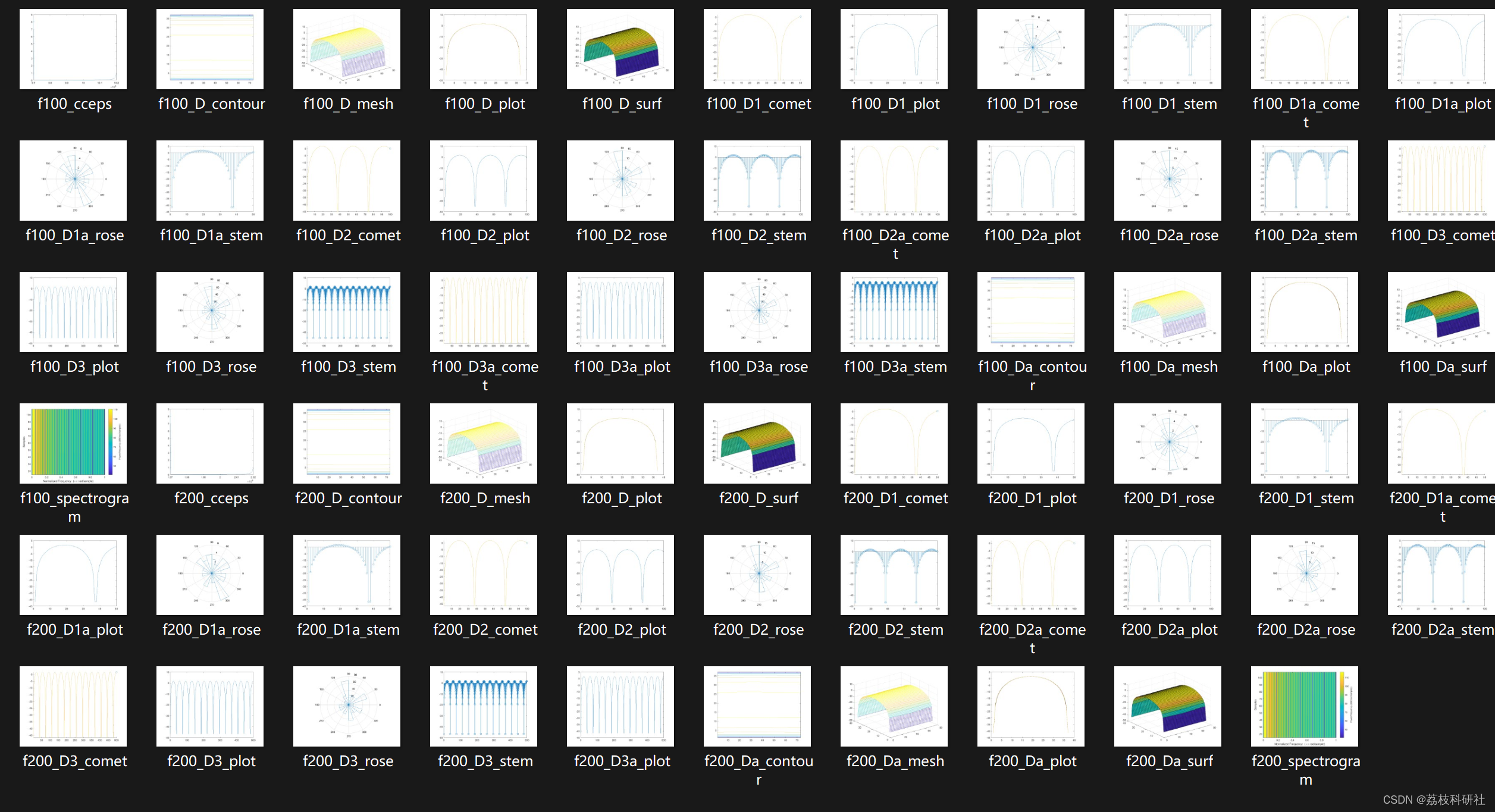
📚2 运行结果
运行结果:
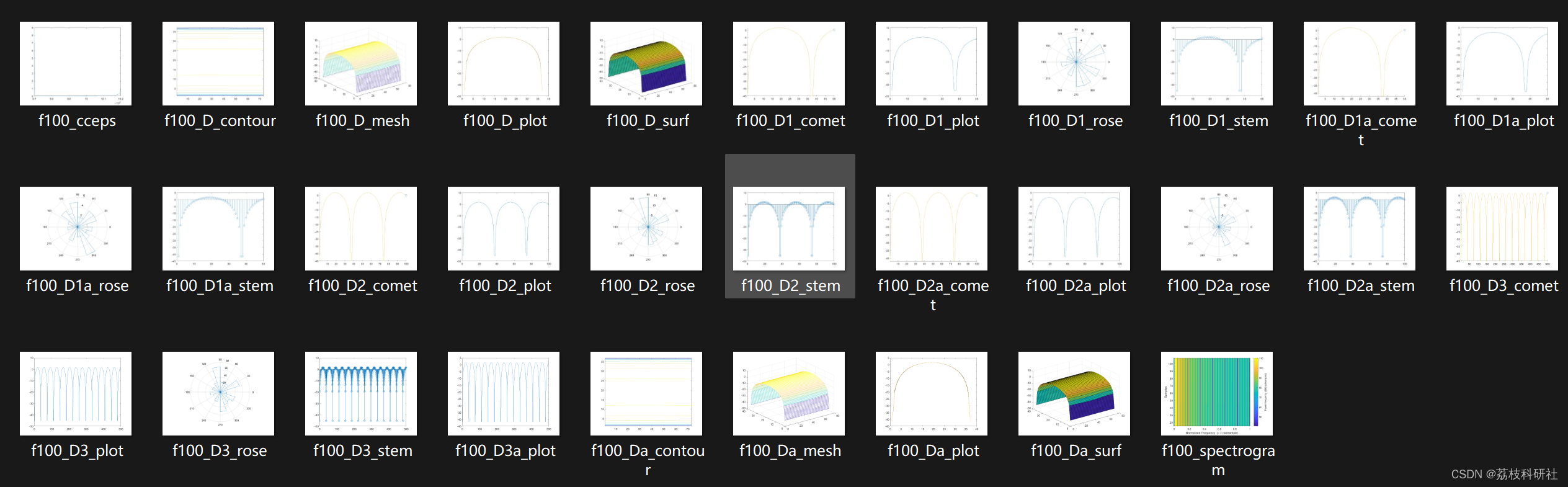
 部分代码:
部分代码:
freq = 97e3:0.04e3: 102e3;
t=linspace(-0.3,0.3,61);
spectrogram(freq,t)
gcf;
saveas(gcf, 'results/f100_spectrogram.png')
plot(freq,cceps(freq))
gcf;
saveas(gcf, 'results/f100_cceps.png')
load('3d7_100/D.mat');
plot(D)
gcf;
saveas(gcf, 'results/f100_D_plot.png')
surf(D)
gcf;
saveas(gcf, 'results/f100_D_surf.png')
mesh(D)
gcf;
saveas(gcf, 'results/f100_D_mesh.png')
contour(D)
gcf;
saveas(gcf, 'results/f100_D_contour.png')
load('3d7_100/Da.mat');
plot(Da)
gcf;
saveas(gcf, 'results/f100_Da_plot.png')
surf(Da)
gcf;
saveas(gcf, 'results/f100_Da_surf.png')
mesh(Da)
gcf;
saveas(gcf, 'results/f100_Da_mesh.png')
contour(Da)
gcf;
saveas(gcf, 'results/f100_Da_contour.png')
load('3d7_100/D1.mat');
plot(D1)
gcf;
saveas(gcf, 'results/f100_D1_plot.png')
comet(D1)
gcf;
saveas(gcf, 'results/f100_D1_comet.png')
stem(D1)
gcf;
saveas(gcf, 'results/f100_D1_stem.png')
rose(D1)
gcf;
saveas(gcf, 'results/f100_D1_rose.png')
load('3d7_100/D1a.mat');
plot(D1a)
gcf;
saveas(gcf, 'results/f100_D1a_plot.png')
comet(D1a)
gcf;
saveas(gcf, 'results/f100_D1a_comet.png')
stem(D1a)
gcf;
saveas(gcf, 'results/f100_D1a_stem.png')
rose(D1a)
gcf;
saveas(gcf, 'results/f100_D1a_rose.png')
load('3d7_100/D2.mat');
plot(D2)
gcf;
saveas(gcf, 'results/f100_D2_plot.png')
comet(D2)
gcf;
saveas(gcf, 'results/f100_D2_comet.png')
stem(D2)
gcf;
saveas(gcf, 'results/f100_D2_stem.png')
rose(D2)
gcf;
saveas(gcf, 'results/f100_D2_rose.png')
load('3d7_100/D2a.mat');
plot(D2a)
gcf;
saveas(gcf, 'results/f100_D2a_plot.png')
comet(D2a)
gcf;
saveas(gcf, 'results/f100_D2a_comet.png')
stem(D2a)
gcf;
saveas(gcf, 'results/f100_D2a_stem.png')
rose(D2a)
gcf;
saveas(gcf, 'results/f100_D2a_rose.png')
load('3d7_100/D3.mat');
plot(D3)
gcf;
saveas(gcf, 'results/f100_D3_plot.png')
comet(D3)
gcf;
saveas(gcf, 'results/f100_D3_comet.png')
stem(D3)
gcf;
saveas(gcf, 'results/f100_D3_stem.png')
rose(D3)
gcf;
saveas(gcf, 'results/f100_D3_rose.png')
load('3d7_100/D3a.mat');
plot(D3a)
gcf;
saveas(gcf, 'results/f100_D3a_plot.png')
comet(D3a)
gcf;
saveas(gcf, 'results/f100_D3a_comet.png')
stem(D3a)
gcf;
saveas(gcf, 'results/f100_D3a_stem.png')
rose(D3a)
gcf;
saveas(gcf, 'results/f100_D3a_rose.png')
load('3d7_100/D4.mat');
plot(D4)
gcf;
saveas(gcf, 'results/f100_D4_plot.png')
comet(D4)
gcf;
saveas(gcf, 'results/f100_D4_comet.png')
stem(D4)
gcf;
saveas(gcf, 'results/f100_D4_stem.png')
rose(D4)
gcf;
saveas(gcf, 'results/f100_D4_rose.png')
load('3d7_100/D4a.mat');
plot(D4a)
gcf;
saveas(gcf, 'results/f100_D4a_plot.png')
comet(D4a)
gcf;
saveas(gcf, 'results/f100_D4a_comet.png')
stem(D4a)
gcf;
saveas(gcf, 'results/f100_D4a_stem.png')
rose(D4a)
gcf;
saveas(gcf, 'results/f100_D4a_rose.png')
load('3d7_100/D5.mat');
plot(D5)
gcf;
saveas(gcf, 'results/f100_D5_plot.png')
comet(D5)
gcf;
saveas(gcf, 'results/f100_D5_comet.png')
stem(D5)
gcf;
saveas(gcf, 'results/f100_D5_stem.png')
rose(D5)
gcf;
saveas(gcf, 'results/f100_D5_rose.png')
load('3d7_100/D5a.mat');
plot(D5a)
gcf;
saveas(gcf, 'results/f100_D5a_plot.png')
comet(D5a)
gcf;
saveas(gcf, 'results/f100_D5a_comet.png')
stem(D5a)
gcf;
saveas(gcf, 'results/f100_D5a_stem.png')
rose(D5a)
gcf;
saveas(gcf, 'results/f100_D5a_rose.png')
compass(D1)
gcf;
saveas(gcf, 'results/f100_D1_compass.png')
compass(D1a)
gcf;
saveas(gcf, 'results/f100_D1a_compass.png')
compass(D2)
gcf;
saveas(gcf, 'results/f100_D2_compass.png')
compass(D2a)
gcf;
saveas(gcf, 'results/f100_D2a_compass.png')
compass(D3)
gcf;
saveas(gcf, 'results/f100_D3_compass.png')
compass(D3a)
gcf;
saveas(gcf, 'results/f100_D3a_compass.png')
compass(D4)
gcf;
saveas(gcf, 'results/f100_D4_compass.png')
compass(D4a)
gcf;
saveas(gcf, 'results/f100_D4a_compass.png')
compass(D5)
gcf;
saveas(gcf, 'results/f100_D5_compass.png')
compass(D5a)
gcf;
saveas(gcf, 'results/f100_D5a_compass.png')
🌈3 Matlab代码实现
🎉4 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]Abhishek Bansal, December 1, 2020, "Data: EM Fields in Wireless Charging of Electric Vehicles ", IEEE Dataport, doi: https://dx.doi.org/10.21227/hwzd-r355.
相关文章
- 基于组合双向拍卖的共享储能机制研究(Matlab代码实现)
- 风力发电系统的随机调度研究(matlab代码实现)
- 【需求响应】基于数据驱动的需求响应优化及预测研究(Matlab代码实现)
- 【无功优化】考虑泄流效应的光伏并网点电压系统侧无功优化(Matlab代码实现)
- 计及碳捕集电厂低碳特性的含风电电力系统源–荷多时间尺度调度方法(Matlab代码实现)
- 【无人机路径规划】基于深度强化学习的多无人机辅助边缘计算网络路径规划(Matlab代码实现)
- 基于改进粒子群优化算法的UAV三维路径规划研究(Matlab代码实现)
- 【SSA-LSTM】基于麻雀算法优化LSTM 模型预测研究(Matlab代码实现)
- 基于LSSVM和PSO进行信号预测(Matlab代码实现)
- 极限学习机和自适应稀疏表示算法 (EA-SRC)(Matlab代码实现)
- 基于双向LSTM模型进行电力需求预测(Matlab代码实现)
- Cholesky分解(Matlab代码实现)
- 基于模式分类的双支持向量机(Matlab代码实现)
- 基于APSA 和 LMS 的系统识别的比较(matlab代码实现)
- 【不确定性研究】基于信息间隙决策理论的综合能源系统优化调度研究【改进粒子群优化算法求解】(Matlab代码实现)
- SMMP:一种基于稳定成员资格的多峰聚类算法(Matlab代码实现)
- 【物理应用】使用标量衍射理论和菲涅耳和弗劳恩霍夫衍射的衍射对波动光学进行建模(Matlab代码实现)
- 【信号处理】基于到达角的超声多频信号手势识别(Matlab代码实现)
- 【图像分类】基于 CNN 和混合/随机配对的数据增强方法进行图像分类(Matlab代码实现)
- 模糊交通灯控制器研究(Matlab代码实现)
- MATLAB | 三个趣的圆相关的数理性质可视化
- 【状态估计】基于二进制粒子群优化 (BPSO) 求解最佳 PMU优化配置研究【IEEE30、39、57、118节点】(Matlab代码实现)
- 列车-轨道-桥梁交互仿真研究(Matlab代码实现)