
用于自动驾驶汽车赛车中实时最优轨迹规划的顺序凸规划方法(Matlab代码实现)
👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
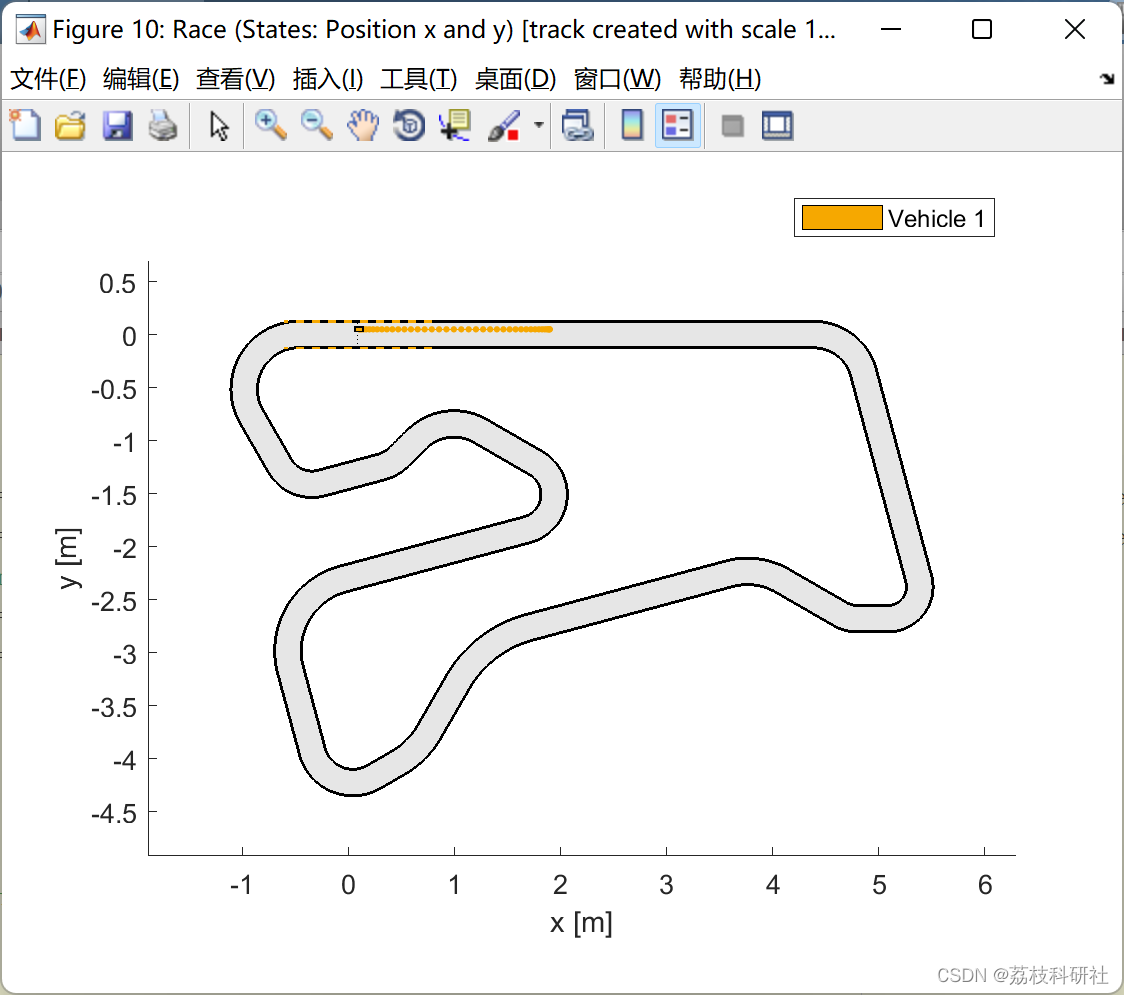
自动驾驶汽车赛车中轨迹规划的优化问题具有非线性和非凸性的特点。通常不是解决这些优化问题,而是求解凸近似以实现高更新率。我们提出了一种基于非线性单轨车辆模型和Pacejka的神奇轮胎公式的实时模型预测控制(MPC)轨迹规划器,用于自动驾驶汽车赛车。在制定了一般的非凸轨迹优化问题之后,我们使用顺序凸规划(SCP)形成了凸近似。最先进的技术使用顺序线性化(SL)凸化轨道约束,这是一种放宽约束的方法。松弛优化问题的解在非凸优化问题中不能保证可行。我们提出了顺序凸约束(SCR)作为凸化轨道约束的方法。SCR 保证生成的解决方案在非凸优化问题中是可行的。我们展示了受限优化问题解决方案的递归可行性。MPC在模拟中在霍根海姆赛道的缩放版本上进行评估。结果表明,使用SCR的MPC比使用SL的MPC产生更快的单圈时间,同时仍然具有实时能力。
- Matlab
- 版本:推荐 R2021a,最低 R2019a
- 符号数学工具箱
- 统计和机器学习工具箱(仅用于评估)
- 求解
- 推荐的 IBM ILOG CPLEX 优化工作室 12.10
- 或者,MATLAB通过“符号数学工具箱”
quadprog
📚2 运行结果

部分代码:
function cfg_vh = vehicle_ST_Liniger(cfg_vh)
% adapts vehicle to Single Track Model Liniger
cfg_vh.description = [cfg_vh.description '\nwith single-track vehicle model & Liniger params'];
%% from Parameter Study (HockenheimShort, SL & SCR)
cfg_vh.p.Q = 1.5; % or even more?2.6 for maximum aggressive but close to instable; % weight for maximization of position on track
cfg_vh.p.R = diag([90 90]); % 41 for maximum aggrasion: 14.6s. 90: 15.1 % weight for control changes over time
cfg_vh.p.trust_region_size = 1.6; % [m] adds/subtracts to position (SL only)
%% Model
% CAVE: model params should match across controller and simulation model
cfg_vh.model_controller_handle = @model.vehicle.SingleTrack;
cfg_vh.modelParams_controller = model.vehicle.SingleTrack.getParamsLinigerRC_1_43_WithLinigerBounds();
cfg_vh.model_simulation_handle = cfg_vh.model_controller_handle;
cfg_vh.modelParams_simulation = model.vehicle.SingleTrack.getParamsLinigerRC_1_43_WithLinigerBounds();
end
🌈3 Matlab代码实现
🎉4 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1] P. Scheffe, T. Henneken, M. Kloock, B. Alrifaee. "Sequential Convex Programming Methods for Real-time Optimal Trajectory Planning in Autonomous Vehicle Racing"
相关文章
- matlab 点云最小二乘拟合二维直线
- Matlab:成功解决Undefined function or variable "B"
- Algorithm之PrA:PrA之IP整数规划(包括0-1整数规划)算法经典案例剖析+Matlab编程实现
- Algorithm之PrA:PrA之nLP非线性规划算法+Matlab 优化工具箱的GUI求解非线性规划
- 智能优化算法——哈里斯鹰算法(Matlab代码实现)
- 基于多能互补的热电联供型微网优化运行(Matlab代码实现)
- 电力系统潮流计算与PowerWorld仿真(牛顿拉夫逊法和高斯赛德尔法)(Matlab实现)
- 【无人机】基于灰狼优化算法的无人机路径规划问题研究(Matlab代码实现)
- 基于冲突搜索算法的多机器人路径规划(Matlab代码实现)
- 【路径优化】基于改进的RRT算法的全局路径规划(Matlab代码实现)
- 【路径规划】基于拓展随机树(RRT)算法的路径规划问题(Matlab代码实现)
- 基于随机蛙跳算法(SFLA)的生产调度问题(Matlab代码实现)
- 【优化调度】基于改进遗传算法求解带时间窗约束多卫星任务规划(Matlab代码实现)
- 【形状记忆合金的本构模型】基于 FEM实现与速率无关的耗散固体研究(Matlab代码实现)
- 【MATLAB】求解非线性规划
- 基于人工势场法的二维平面内无人机的路径规划的matlab仿真,并通过对势场法改进避免了无人机陷入极值的问题
- m基于ACO蚁群优化的货车运输路线规划matlab仿真,考虑车辆载重,单位运输成本等因素
- m基于CNN卷积神经网络和GEI步态能量图的步态识别算法MATLAB仿真
- MATLAB | 那些你不得不知道的MATLAB小技巧(四)
- 【状态估计】电力系统状态估计的虚假数据注入攻击建模与对策(Matlab代码实现)
- 【语音分离】通过分析信号的FFT,根据音频使用合适的滤波器进行语音信号分离(Matlab代码实现)
- 未定义变量 “Lattice“ 或类 “Lattice.latticeEasy“(Matlab)
- 多相抽取器实现及matlab示例
- Matlab使用笔记(五):输入多个向量函数参数 / 调用同文件下的其它函数 / 同一个源程序文件下实现多个函数模块的构建
- 怎么使用MATLAB编辑图像,使得细节放大