
基于轨迹优化的自动驾驶汽车跟随自行车模型动力学控制(Matlab代码实现)
👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
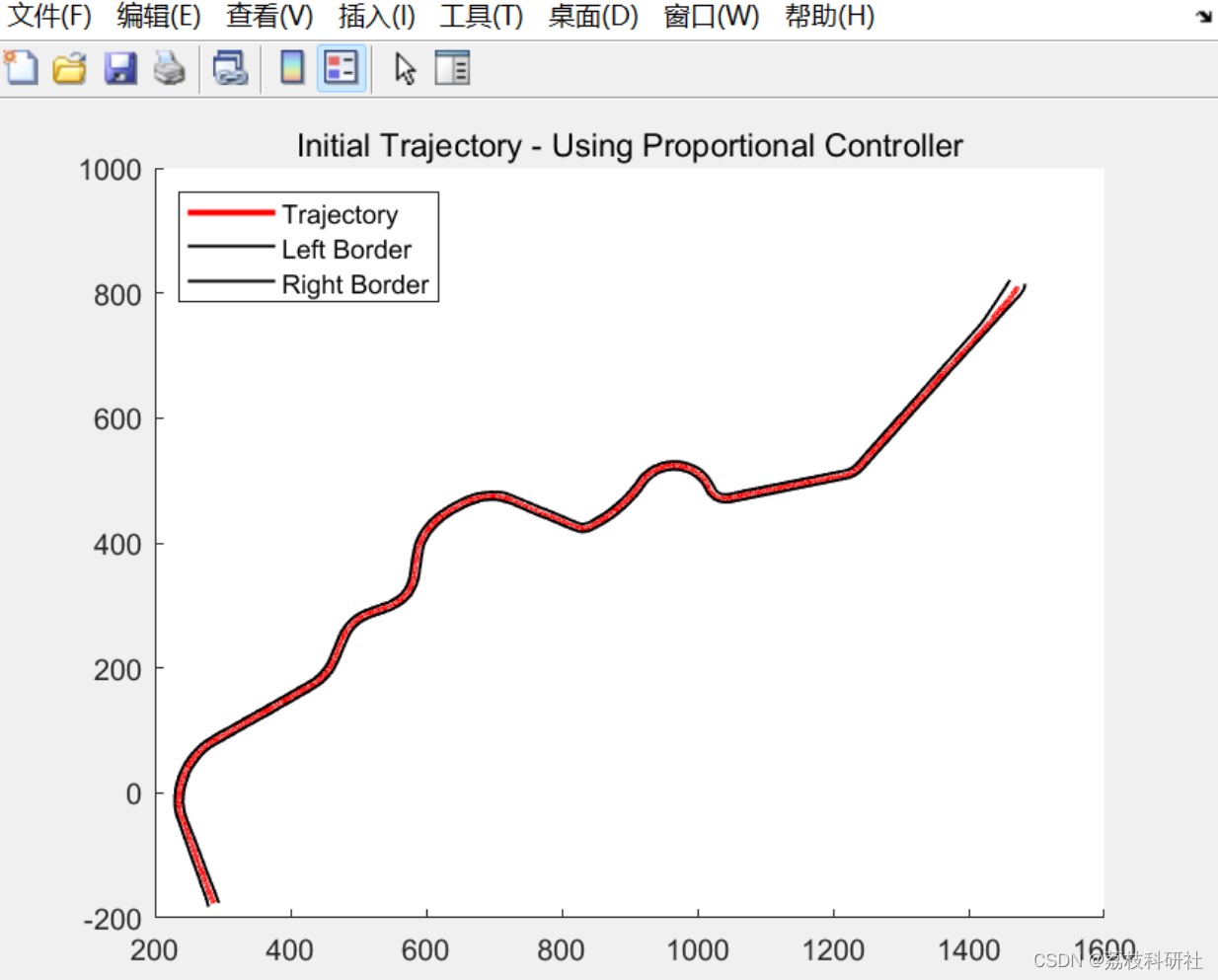
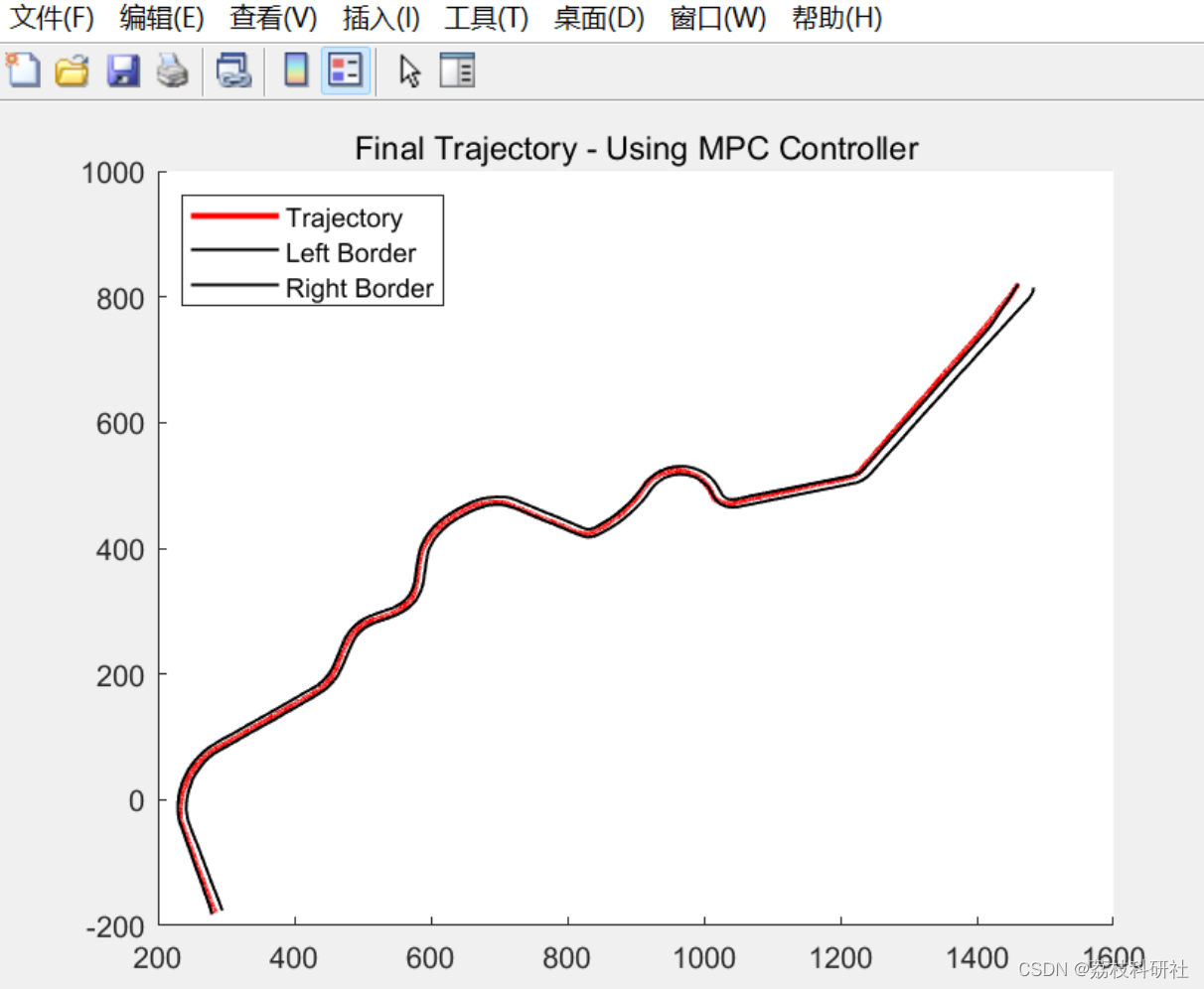
本次使用轨迹优化技术来控制汽车。假设汽车遵循自行车模型的动力学。为了实现稳定和安全的跟踪,我们使用了离散时间模型预测控制。
一个离散的比例控制器(基于定义为偏离赛道中心线的函数的误差)用于生成我们的赛车将遵循的近似轨迹。
📚2 运行结果
部分代码:
clear
close all
clc
trackDataFileName = 'TestTrack';
%% Proportional Control
initialState = [287,5,-176,0,2,0];
initialTrajectoryFileName = initialTrajectoryGenerator(trackDataFileName,initialState);
disp('Initial Trajectory Generated');
%% MPC
% differentInitialState = initialState; % to keep the same initial state
differentInitialState = [284,5,-180,0,2,0]; % to provide a different initial state
finalTrajectoryFileName = discreteMPC(initialTrajectoryFileName,differentInitialState);
disp('MPC Trajectory Generated');
%% Plots
load(trackDataFileName);
leftLine = TestTrack.bl;
rightLine = TestTrack.br;
load(initialTrajectoryFileName);
initialTraj_X = InitialTraj.states(:,1);
initialTraj_Y = InitialTraj.states(:,3);
load(finalTrajectoryFileName);
finalTraj_X = FinalTraj.states(:,1);
finalTraj_Y = FinalTraj.states(:,3);
figure(1)
title('Initial Trajectory - Using Proportional Controller')
hold on
plot(initialTraj_X, initialTraj_Y, 'r','LineWidth',2);
plot(leftLine(1,:), leftLine(2,:), 'k','LineWidth',1);
plot(rightLine(1,:),rightLine(2,:),'k','LineWidth',1);
legend('Trajectory','Left Border','Right Border','Location','NorthWest')
hold off
figure(2)
title('Final Trajectory - Using MPC Controller')
hold on
plot(finalTraj_X, finalTraj_Y, 'r','LineWidth',2);
plot(leftLine(1,:), leftLine(2,:), 'k','LineWidth',1);
plot(rightLine(1,:),rightLine(2,:),'k','LineWidth',1);
legend('Trajectory','Left Border','Right Border','Location','NorthWest')
hold off
figure(3)
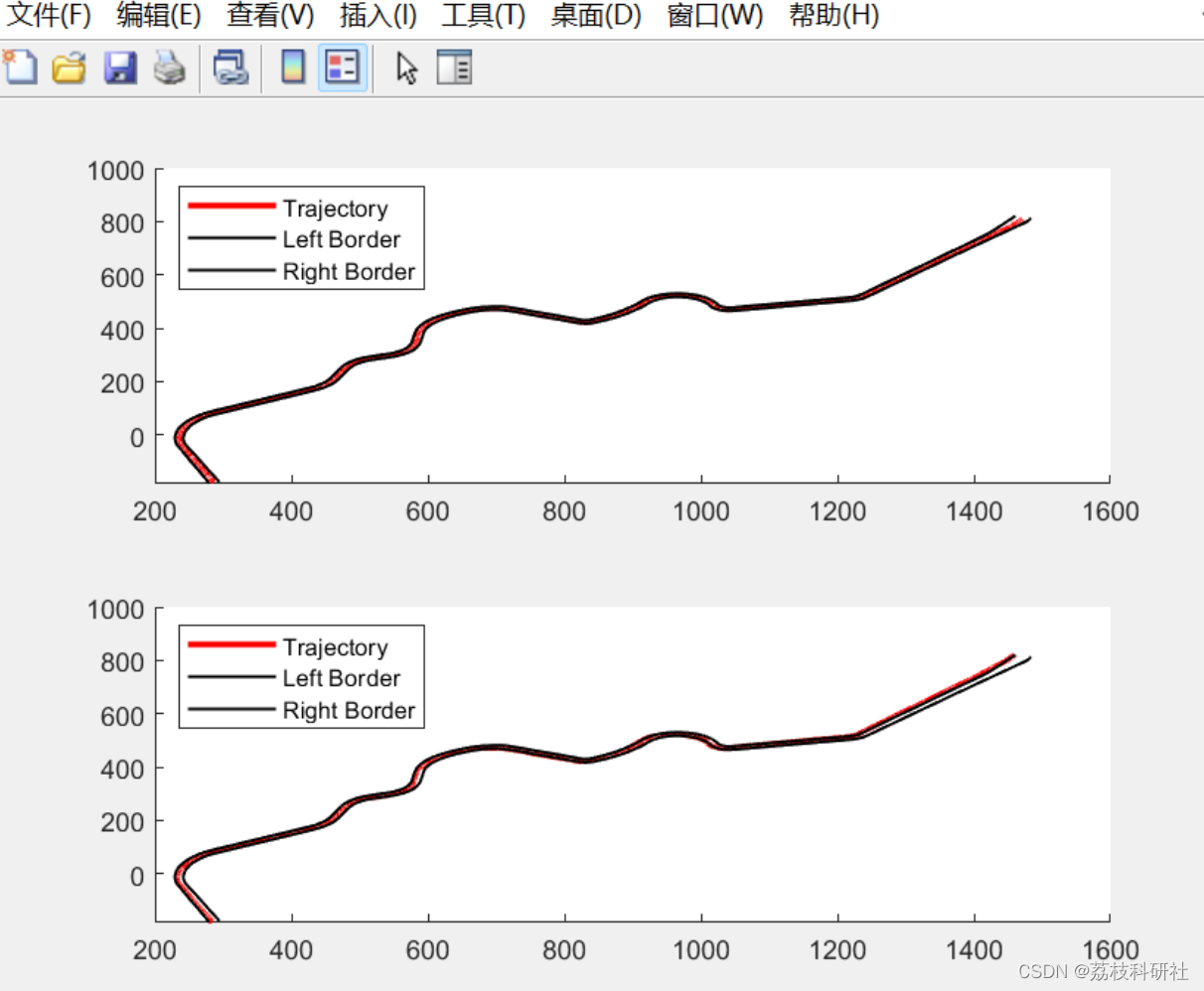
title('Comparing initial part of track')
subplot(2,1,1);
hold on
plot(initialTraj_X, initialTraj_Y, 'r','LineWidth',2);
plot(leftLine(1,:), leftLine(2,:), 'k','LineWidth',1);
plot(rightLine(1,:),rightLine(2,:),'k','LineWidth',1);
legend('Trajectory','Left Border','Right Border','Location','NorthWest')
hold off
subplot(2,1,2);
hold on
plot(finalTraj_X, finalTraj_Y, 'r','LineWidth',2);
plot(leftLine(1,:), leftLine(2,:), 'k','LineWidth',1);
plot(rightLine(1,:),rightLine(2,:),'k','LineWidth',1);
legend('Trajectory','Left Border','Right Border','Location','NorthWest')
hold off
🌈3 Matlab代码实现
🎉4 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]李晓芳,何俊.智能自动驾驶汽车的轨迹优化[J].价值工程,2017,36(21):129-130.DOI:10.14018/j.cnki.cn13-1085/n.2017.21.055.
相关文章
- matlab模糊控制工具箱使用教程_模糊pid控制原理
- matlab中如何求插值点,MATLAB插值「建议收藏」
- bp神经网络及matlab实现_bp神经网络应用实例Matlab
- BP人工神经网络matlab工具箱_matlab神经网络控制
- matlab循环语句for_MATLAB以下选择语句错误的是
- matlab画三维约束图命令,Matlab画三维图的方法[通俗易懂]
- matlab 怎么使用function,Matlab中function函数使用操作方法
- 【MATLAB】matlab 文档使用 ( 文档查询 | 文档层次 | 自带搜索工具 | 帮助命令 | 学习导引 )
- element ui 表格(table)里边使用Switch开关,单独控制详解编程语言
- 控制利用Oracle循环控制编程优化技术(oracle中的循环)
- Redis与Java无缝整合控制过期策略(redisjava过期)
- MySQL读写锁:实现细致的数据控制(mysql读锁 写锁)
- MySQL多用户管理不同owner的数据库访问权限控制(mysql不同owner)
- Oracle事务的安全性保障并发控制的研究(oracle 事务并发)
- 管理 Oracle 权限管理实现细粒度控制(oracle中用户权限)
- 华尔街英语负责人被控制:欠下12亿学费跑路、已被强制执行
- 用css来控制图片大小显示的实现方法与代码
- 用javascript控制表格行的展开和隐藏的代码
- Python流程控制实例代码
- js判断文件类型并控制表单提交示例代码